基于泛在位置服务的嵌入式导航计算机系统设计分析
2018-08-25刘蔚
刘蔚
(陕西财经职业技术学院陕西咸阳712000)
泛在的意思就是无所不在,泛在位置服务指的就是实现信息及物理的空间无缝对接,从而使服务具有无所不包、无所不在和无所不能的特点,还能够使人们实现任何地点、任何时间、任何物和任何人都能够顺利的通信,从而利用合适终端设备实现接入网的相互通信,以此得到无所不在及无时无刻的位置服务[1]。SINS属于捷联惯性导航系统,其具有自主导航的能力,不需要外界的电磁信号就能够具有独立速度、姿态及位置的信息,并且具有较强的抗外界干扰能力,但是无法实现具有较高的精度任务[2]。GPS属于高精度的全球三维实时卫星导航系统,并且具有高精度及全天候的优势,但是其具有较差的自主性和抗干扰能力,无法满足快速的实时导航需求。现代定位导航技术都具有自身的优缺点,使用卡尔曼滤波器能够将现代定位导航技术两个相互结合,从而组合成为全新的导航系统,从而组合成为具有较高精度的导航任务[3],基于此,本文就针对基于泛在位置服务的嵌入式导航计算机系统的设计进行全面分析。
1 嵌入式导航计算机系统的需求
首先,以现代导航系统功能特点为基础,可以将系统功能分为3部分,分别为数据收集、导航参数运算及数据的输出。
其中数据收集指的是根据系统输出信号,将不同信号转化成为统一数据信号实现收集;
导航数据输出指的是根据针对性的方式实现控制系统的输出,从而使控制系统解算之后对运载体的速度及姿态进行调整,以此使其能够到达正确的目标位置中;
导航参数的解算主要目的就是实现位置姿态信息计算,要求其具有一定的数据处理能力[4]。
另外,导航计算机属于系统的核心处理器,其除了以上基本的功能之外,还要求其具有自身的独特性能,从而对系统整体能够造成影响,包括系统应用范围。本文所研究系统的性能需求主要包括以下方面:
要求导航计算机具有较高的实时性,计算机接口的主要目的就是实现实时的输入和输出,所以在导航精度需求不断提高的过程中,对于导航计算机实时性的需求也在不断的提高。
要求导航系统的体积较小;
要求导航计算机系统具有较低的功耗,并且保证系统运行过程中的可靠性;
要求导航计算机系统的性价比较高,从而提高应用范围[5]。
2 嵌入式导航计算机系统的框架
根据以上需求,实现嵌入式导航计算机系统的框架设计,详见图1。
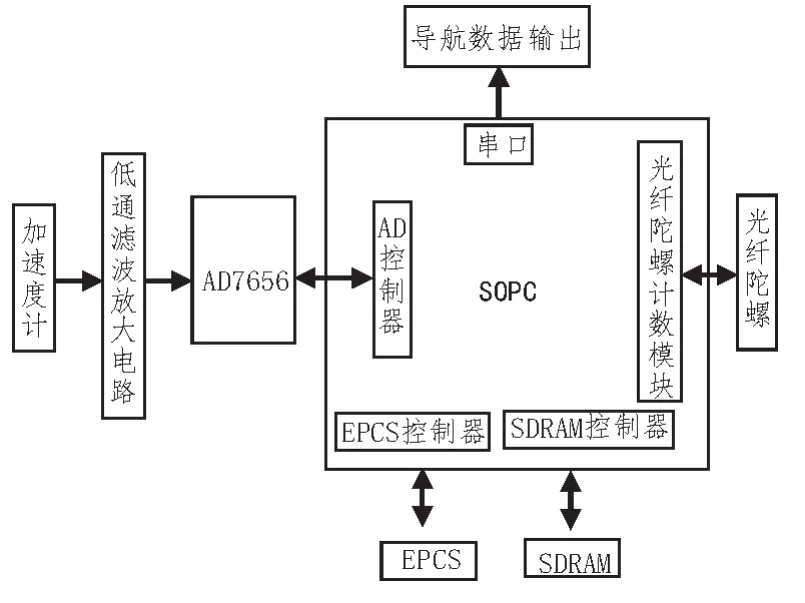
图1 嵌入式导航计算机系统的框架设计
3 嵌入式导航计算机系统的硬件设计
导航计算机系统的硬件电路设计主要包括软核处理器、外围电路。
3.1 软核处理器
现代软核处理器主要包括3种,分别为高性能软核、精简软核和标准软核。软核处理器的开发套件较为完善,主要包括集成开发环境、编译器、调试器和协议栈。图2为软核处理器的结构。

图2 软核处理器的结构
3.2 接口电路的设计
其一,电源电路。图3为供电电路,其功率及电流较低,电路简单,能够使用。

图3 供电电路的结构
其二,接口电路。一般在嵌入式导航计算机系统中,需要实现SDRAM的外部接口,因为其的成本较低,容量较高优势,所以要选择使用SDRAM作为程序在运行过程中的外部存储器。SDRAM动态存储单位是通过管栅极电容实现电荷存储的原理创建,但是因为此栅极电容容量比较小,那么其保存电荷的时间有限,所以为了能够实现漏掉电荷的补充,避免信号存储丢失,就要定期进行电荷补充[6]。图4为SDRAM接口电路的创建。
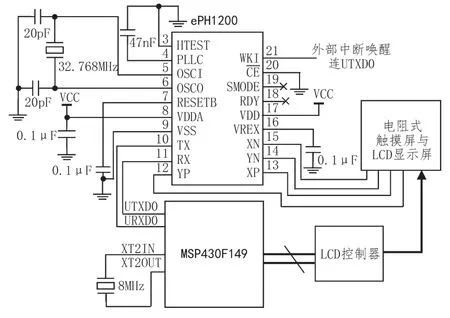
图4 SDRAM接口电路的创建
其三,加速度调理电路。此部分电路能够实现加速度信号的隔离、变换、滤波及放大处理,从而使输入信号满足A/D转换的需求。图5为单路电路的构成。
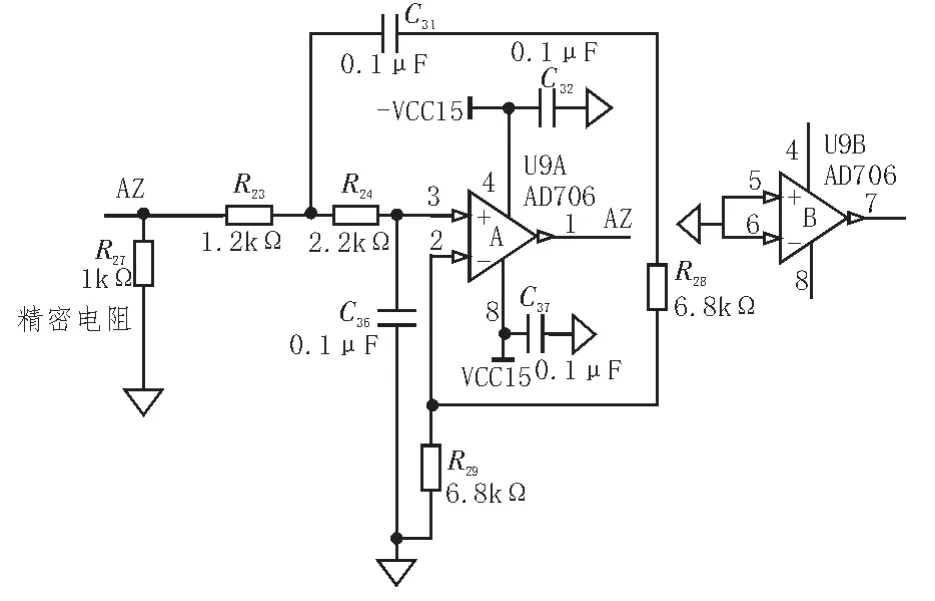
图5 单路电路的构成
4 嵌入式导航计算机系统的软件系统
4.1 数据发送模块
数据发送模块要将收集到的内容到寄存器中存储,之后发送帧串行数据,包括串行数据位、起始位、奇偶位及停止位。为了能够对状态并行数据及发送串行数据进行控制,就要具有发送移位寄存器及控制器。在实现串行数据发送的过程中,要将信号发送器实现数据位、起始位的选择,控制器的主要目的就是对数据的发送进行控制。控制器的主要目的就是对控制器进行数据的发送,从而产生起始位,对两计数器的计数进行控制[7]。图6为系统的发送模块结构。

图6 系统的发送模块结构
发送控制器属于发送模块中的核心单位,能够对发送器的其他模块进行协调控制,通过状态机进行实现[8]。图7为发送该控制的转台转移图。
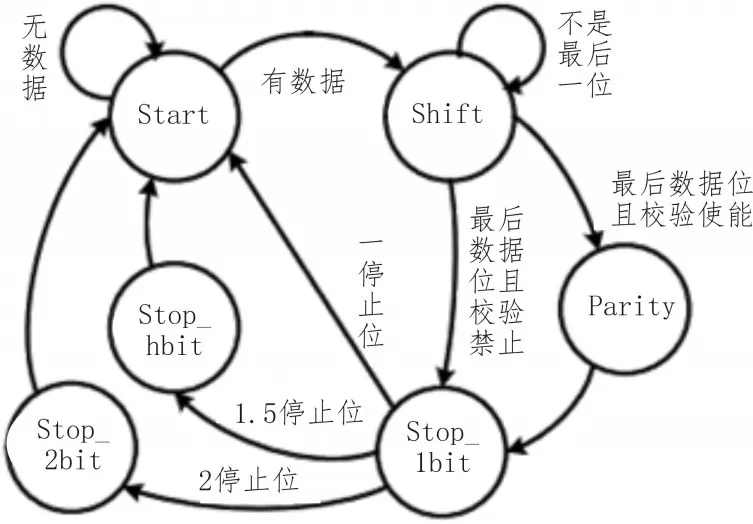
图7 发送该控制的转台转移图
4.2 数据接收模块
数据接收模块要进行起始位检测,之后对数据进行接收,然后实现奇偶校验,对停止位进行识别,最后出现错误状态信息,在接收模块中实现结果的写入。所以,接收模块要求具有接收移位寄存器、奇偶校验器、控制器和起始位的检测电路,和接收模块相同[9]。图8为接收模块的结构。

图8 接收模块的结构
此模块中的接收控制器主要是通过有限状态机进行实现,以接收数据帧为基础,从而实现状态的转换[10]。图9为状态的转换过程。
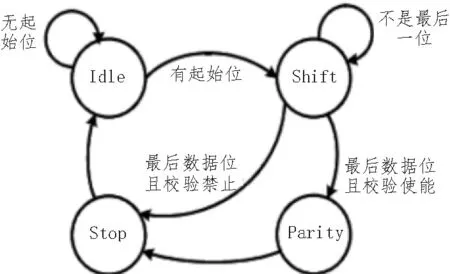
图9 状态的转换过程
4.3 路径规划模块
路径规划模块的主要目的就是使驾驶人员在旅行过程中实现行驶路程的规划,其也是路径导航中的基本模块,其能够有效实现导航功能。其在城市密集道路网中行驶,根据侧重点不同,从目前为止到目的为止的路线方案也各不相同,比如最高性价比、最优路径和最短时间,从而为驾驶人员在道路选择过程中提供较多的条件[11]。此模块能够在数字地图中实现导航路径和起始点、目的地坐标的输入,用户能够利用路径分析实现路径的自动规划,从而将规划之后的路径对路径处理进行提交,并且显示,进行保存入库[12]。图10为嵌入式导航系统的导航技术方案。
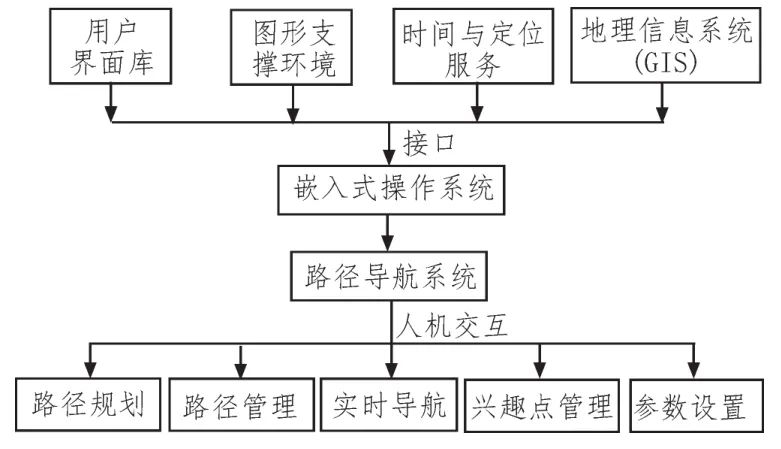
图10 嵌入式导航系统的导航技术方案
5 系统的实现
5.1 路径规划
路径规划主要包括数据显示及数据解码模块,用户利用人机界面对用户在数字地图中的最佳路径位置进行规划,将点位数据到导航路径中进行输入,并且将规划实现的导航路径到路径数据库中进行存储。数据显示模块的主要目的就是以系统参数配置为基础,实现用户规划路径的可视化展现。数据解码模块的主要目的就是实现路径数据的恢复,用户能够利用触摸屏及鼠标在系统界面中绘制手动该路径[13],图11为系统路径规划的实现效果。

图11 系统路径规划的实现效果
5.2 实时导航
实时导航主要包括偏航报警、数据显示及轨迹记录模块,其中的轨迹记录模块主要目的就是对目前位置信息进行接收,并且对历史轨迹信息进行保存。偏航报警模块的主要目的就是对目前导航路径偏移量及位置进行计算,在偏移量较大的时候,就要实现用户报警[14]。图12为系统实时导航的执行序列。
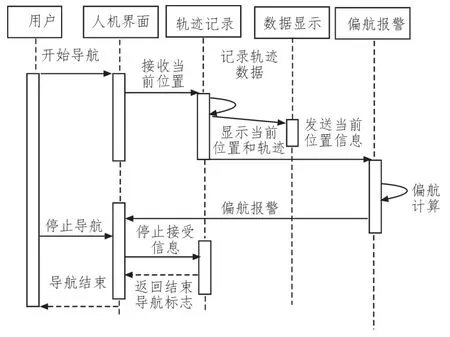
图12 系统实时导航的执行序列
5.3 系统参数的设置
系统参数的设置主要是利用人机交互界面实现,设置偏航阈值、导航路径颜色及导航轨迹,参数的设置功能对相应的设置结果进行返回,用户利用鼠标及触摸屏对自身需求参数进行设置,设置完成之后点击确定,并且在导航电子地图中进行展现[15]。图13为参数的设置效果。
5.4 路径管理
路径管理的主要包括路径保存、路径删除、路径浏览模块构成,首先用户要利用路径保存模块实现导航路径的接收和规划,用户利用对文件系统中导航路径进行读取,在用户对导航路径查看的时候,能够利用路径浏览模块进行查看,用户的所有操作都是利用人机界面交互实现[16]。

图13 参数的设置效果
6 结束语
根据定位的多种方式优缺点,本文就提出了基于泛在位置服务的系统,实现了系统硬件电路及软件模块的设计[17]。本文最后通过系统实现表示,此系统的重量较轻、体积较小、具有较强的自主性,并且成本较低,而且还能够提供大量的质量导航信息,其具有一定的应用价值及发展前景。