MESH系统物理层快速同步算法
2018-08-23孙长龙
孙长龙,张 婷
(1.中国人民解放军91404部队,河北 秦皇岛066001;2.重庆金美通信有限责任公司,重庆400030)
0 引言
物理层同步是网络运行的基础,只有完成物理层同步,才可能完成媒体接入控制层(Media Access Control,MAC)帧同步及全网数据收发[1-4]。但在无中心的MESH网络中,MESH节点采用突发方式通信,在相邻几帧接收的可能是来自不同节点的信号;使得节点很难利用历史接收信息辅助同步。另外,节点在收到一次数据突发后,下一次数据突发到来时刻无法预测,这就要求节点在收到突发信号后,同步过程必须在当前帧快速完成[5-7]。
Schmidl&Cox算法[8-10]是比较经典的同步算法,通过在数据符号前发送2个码元长度的训练序列作为帧头来进行符号定时和频偏联合估计,能同时实现符号同步以及频率的粗同步和精同步;CaiMaoquan等人[11]通过设计新的导频序列,提高符号同步精度,但其定时测度曲线存在多个尖峰,在信道条件恶劣的情况下容易导致符号同步错误;Park算法[12-16]是在Schmidl&Cox等经典算法基础上提出的改进算法,该算法采用了一种新的训练序列结构,并重新设计了新的定时测度函数,使符号定时同步性能有了一定的提高,但算法较复杂,不易工程实现。
分布式MESH网络对同步提出了更高的要求,针对MESH数据突发和移动组网特性,设计了基于MESH的快速同步算法,该算法能在较短时间内进行快速同步,满足系统快速同步需求。
1 MESH PHY帧结构
网状网物理层(MESH Physical Layer,MESH PHY)基于802.16e 点对多点(Point-to-MultiPoint ,PMP)模式下行方案进行设计,发送端参考基站(Base Station,BS)下行发送机制,接收端参考移动台(Mobile Station,MS)下行接收机制[17]。
在802.16e OFDMA PMP系统中,BS作为小区中心,以广播的方式在下行帧传输控制信令和数据信息。小区中各个MS按照BS集中调度的方式,在为其分配的信道上接收相应信息。上行方向上,多个MS按照已分配的上行信道同时向BS发送信息。MESH网为分布式无中心自组织网状网络,节点在网络中是对等的。图1为MESH和PMP的正交频分多址(Orthogonal Frequency Division Multiple Access,OFDMA)帧结构对比。

图1 MESH与PMP OFDMA帧结构
根据MESH帧结构[18-19]设计,将每个子帧前3个符号作为前导符号,如图2所示。第1个前导符号用于自动增益控制(Automatic Gain Control,AGC)调整,由一个特定的数据符号组成,需要将峰均比控制在4 dB以内,以确保接收时检波电压的稳定性更高。第2个前导符号用于定时同步及频率粗同步,采用802.16e的导频码构成,对1 024点模式的导频码进行截短,得到210点的PN码,在频域插值后获得时域四段重复的数据,加上循环前缀(Cyclic prefix,CP)构成第2个前导符号。第3个前导符号用于可选的频率精同步和信道估计与均衡,频域采用802.16e的导频码构成,对2 048点模式的导频码进行截短,得到410点的伪随机码(Pseudo-Noise Code,PN),在频域插值后获得时域两段重复的数据,加上CP构成第3个前导符号。

图2 三前导结构
2 快速同步算法
MESH网络没有BS周期性广播前导码,各节点按照MAC调度的信道发送突发信息,突发的结构基本采用802.16e PMP下行帧结构。与PMP的同步过程不同,由于MESH数据采用突发方式,其同步需要接收端在收到突发以后立即完成。MESH同步只有捕获和同步阶段,没有跟踪阶段。MESH快速同步过程如图3所示,包括3个部分:定时同步、载波同步、频偏估计及补偿。
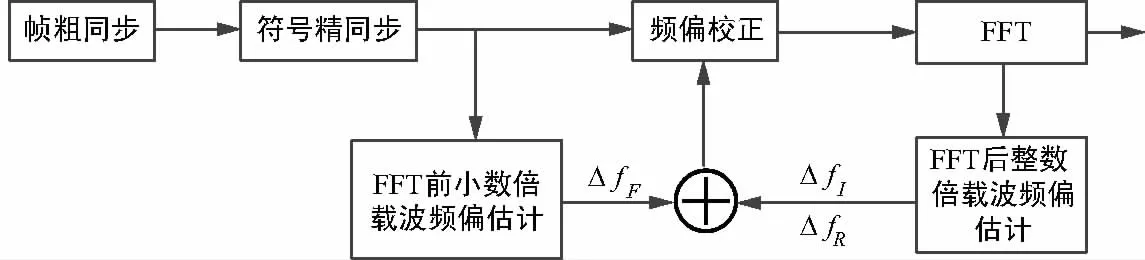
图3 同步整体框图
2.1 定时同步
定时同步一般分为2类,分别为基于循环前缀的同步和基于前导符号的同步。根据MESH网分布式多跳突发通信特点,采用基于前导符号的同步,以满足其快速、稳定的同步要求。基于前导符号的同步算法中,Schmidl&Cox算法是采用较多的方式之一。为了提高定时的准确性并降低实现复杂度,提出了两级定时同步算法,该算法分为粗同步和精同步2个阶段。粗同步在Schmidl&Cox算法的基础上作进一步优化,在得到粗同步定时后通过差分互相关算法得到精同步定时,进一步提高定时准确性。
2.2 小数倍频偏估计
小数倍频偏采用联合估计的方法,在粗同步的位置上,取干扰最小的一段数据做相关,得到的相关结果用于计算频率偏差,其核心思想是通过一个固定时间间隔的相位变化来获得频率,频偏估计原理如图4所示。
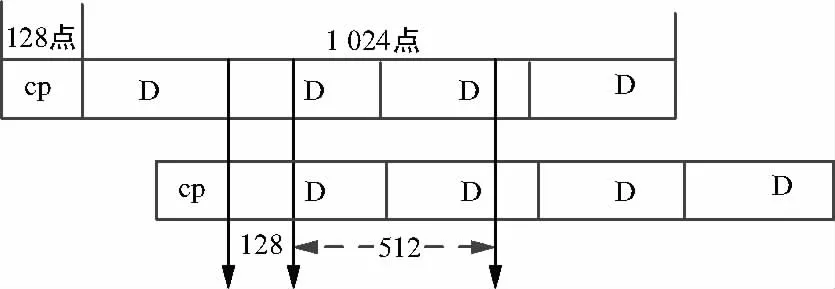
图4 频偏估计原理图
定义归一化频偏计算公式如下:
L_fre_offset=fre_offset/Δf_subcarrier,
(1)
L_fre_offset=angle(Rmax)*FFT_size/(Delay_size*2π)。
(2)
在式(1)中,fre_offset表示频率偏移,Δf_subcarrier表示子载波偏移。式(2)中,Rmax表示累加和的最大值,angle(Rmax)表示取角度,傅里叶变换长度FFT_size为1 024,对于短前导符号,时延Delay_size为256。由于相位估计有效值区间为(-π, π),则式(2)的估计值区间为(-2,2),频偏估计区间则为(-21.875 kHz, 21.875 kHz)。
角度计算通过cordic算法实现,该算法运算简单,并且可以把2π因子转化到cordic运算中去实现,式(2)可转换为式(3):
(3)
式中,L_fre_offset表示归一化频率偏移,fs表示载波频率,化简后得fre_offset=222×L_fre_offset,在整个计算过程中,运用量化方式,有效降低了计算复杂度,小数倍频偏实现框图如图5所示。

图5 小数倍频偏实现框图
2.3 整数倍频偏估计
在前导符号设计中,第3个前导符号主要作为可选的频率精估计,整数倍频偏估计和信道估计。整数倍频偏估计在频域处理,本系统基于已有的整数倍频偏估计算法,利用Preamble良好的自相关和互相关特性,通过对已设计的正交前导码进行搜索,完成整数倍频偏估计。每组相关调整范围[-20,20]子载波,整个搜索过程相关40次。设前导码为P,定时同步FFT以后的长符号的信号为Y(n),n=0,1,…,N-1。
RP(n)=P(n)·YP(n)*,p=-20,…,20,
(4)
式中,YP(n)是对Y(n)位移p位,对Rp(n)进行差分后,可以有效降低定时误差对整数倍频偏估计的影响:
(5)
在设计实现时,可将式(5)化简为:
(6)
这是由于对Rp(n)进行差分相关后已经有了良好的峰值特性,不需要再进行能量平均。同时,由于实际系统中并不存在较大的频偏,根据以往工程经验,将搜索范围调整到[-6,5],整个过程搜索12次,从而极大地减少了计算量。
式(6)计算的是滑动相关,需要大量的相关运算,其运算时间超过1个OFDM符号。为了减少运算时间,结合已有硬件平台,将本地差分相关后的码字存储到AE中,并采用多相的方法,分4个AE并行处理,其实现框图如图6所示。
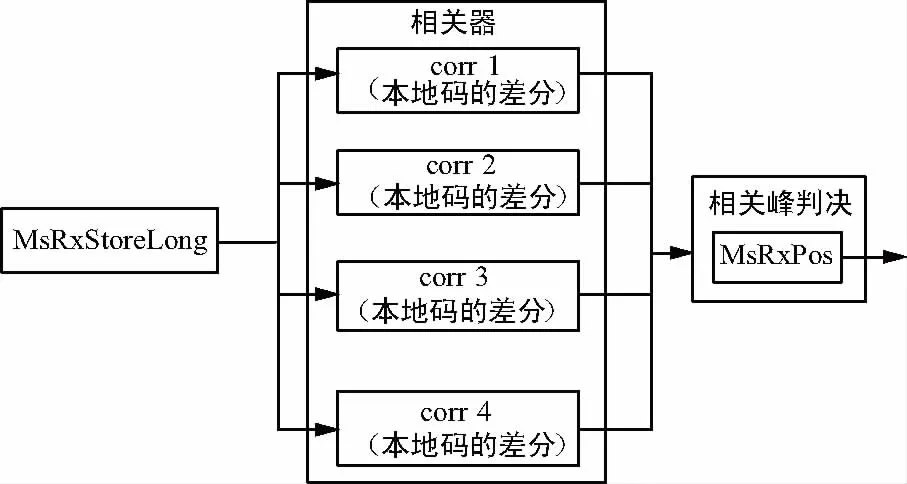
图6 整数倍频偏实现框图
3 仿真分析
在完成第2节所述同步算法设计及实现后,在PMP-PHY的协议下,对MESH通信系统同步性能进行了仿真,主要包括定时精度、频偏估计和归一化频偏范围,仿真参数设置如表1所示。
表1 仿真参数

参数数值载频fC2.2 GHz系统带宽10 MHzFFT点数1 024发送功率P01 W帧长5 ms循环前缀(CP)11.4 μs采样频率11.2 MHz子载波间隔10.94 kHz
图7为MESH快速同步精度测试结果,其中粗同步均方误差(MSE)达到100,精同步的MSE达到10-2。

图7 定时精度
图8为MESH快速同步频偏估计测试结果,其频偏估计误差达到10-3。
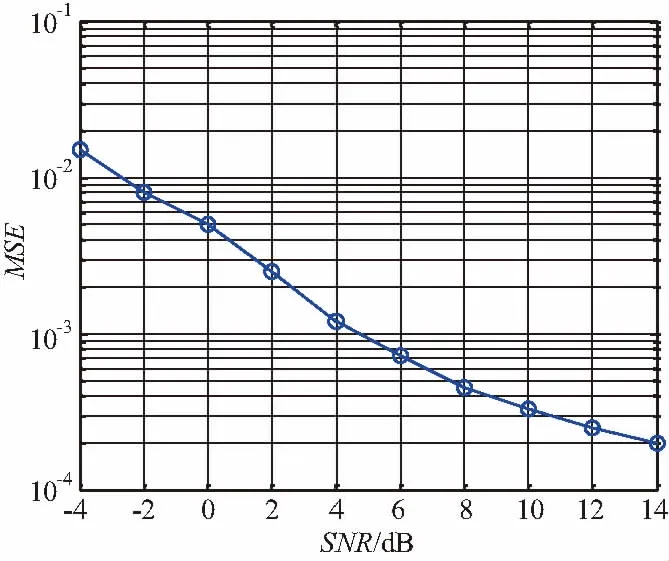
图8 频偏估计测试
图9为本文设计的MESH同步方案归一化频偏估计范围,其频偏估计范围为2个子载波间隔。
本快速同步方案与已有的PMP PHY同步相比,没有跟踪阶段,不再依靠历史信息完成同步,而是通过快速捕获、分级定时同步、载波和频偏估计完成同步。测试表明,在10 M信道带宽下,本方案能够在接收到数据突发后200 μs(2个导频符号)内完成同步;另外,在同步精度、频偏估计精度和频偏估计范围方面均能够满足MESH指标要求。

图9 MESH同步方案归一化频偏估计范围
4 结束语
基于已有的802.16e PMP PHY成果,结合MESH突发通信、移动性强等特点,提出了基于MESH快速同步算法设计。通过对MESH同步过程各阶段的优化,实现了MESH网络的快速同步。在定时同步阶段,提出了两级定时同步算法,在提高定时准确性的同时降低了实现复杂度。通过联合估计法实现载波同步。利用频偏校正进一步提高同步的准确性。在10 M信道带宽下,该快速同步算法可在接收到突发信息后的200 μs内完成同步。对MESH快速同步精度、频偏估计和归一化频偏范围的测试结果表明,本方案在粗同步和精同步上的均方误差分别达到100和10-2,频偏估计误差达到10-3,其归一化频偏估计范围在2个子载波以内,能够很好地满足系统快速同步需求。