仿生减阻树木移植机铲片设计与试验
2018-08-22马行潇高巧玲陈成锦陈建能
赵 雄,马行潇,高巧玲,陈成锦,陈建能※
(1. 浙江理工大学机械与自动控制学院,杭州 310018;2. 浙江三锋实业股份有限公司,金华 321300)
0 引 言
中国人均森林占有面积只有世界水平的 16%,且近几年来,土地沙漠化问题日益严重[1-2],据统计,20世纪70年代以来,仅土地沙漠化面积扩大速度,每年就有2 460 hm2[3-4]。因此,改善土地沙化是中国目前亟需解决的问题,树木栽植是快速绿化造林的有效途径,但也是一项劳动强度很大的作业,人工栽植效率低、成本高[5-6],机械化移植可以减轻劳动强度、提高经济效益[7],目前树木移植机多由通用挖掘机变形开发,整机功率大、能耗高,需要从整机功率匹配和挖掘部件减阻降耗两方面开展性能提升研究。市场上投入使用的树木移植机通常都是由铲片组来完成挖土的工作,铲片是树木移植机的重要工作部件,其尺寸参数、形状以及数量分布直接影响着树木移植机整机挖土性能,分析铲片的受力特性并减小铲片切削阻力可有效提高树木移植机的挖土效率和减小整机能耗。
在挖掘部件减阻技术研究方面,石林榕等应用逆向工程方法来提取蝼蛄胫节上第一趾的侧面曲线信息,设计出马铃薯挖掘机仿生铲片[8]。崔占荣等基于逆向工程技术和仿生学原理,建立野猪头部的三维几何模型并对其特征曲线进行了分析,试验结果表明仿生研究工作对于降低触土部件土壤阻力和改善农机部件工作质量具有重要作用[9]。白景峰等利用仿生学原理将狗獾爪趾的曲线应用到深松铲的结构设计中,设计了一种铲柄刃口为多项式曲线、铲尖为圆弧形的新型深松铲,试验证明仿生深松铲减阻效果明显[10]。一些长期生活在泥土中的动物,经过亿万年的变异和进化,逐渐形成了减黏降阻的特性,研究发现体表分布的几何非光滑单元是土壤动物减黏降阻的主要原因之一。刘庆怀等对生活在土壤中的动物步甲进行了长期的实地观察,并对其进行了活体取样及表面分析,发现步甲体表分布有大量的几何非光滑单元,这些几何非光滑单元在其用来挖土的器官—大颚上的表现尤为明显[11]。因此,对传统挖掘机铲片进行仿生研究有望在移植机整体技术不变的情况下实现节能降耗。
本文基于工程仿生学理论,从动物挖削土壤中获得启发,在分析树木移植机铲片受力特性的基础上,对树木移植机触土部件进行仿生改形设计,以提高其减阻性能。首先运用ANSYS/LS-DYNA模拟铲片切削土壤的动态过程,分析切削土壤过程中土壤的应力变化及铲片切削阻力的变化情况,以寻找能够最大程度减小切削阻力的铲片入土角。然后仿照土壤动物步甲的掘土器官大颚的体表结构设计非光滑仿生铲片,即在原型铲片表面设计规律分布的球冠形凸起单元,并利用计算机数值仿真检验仿生铲片减小切削阻力的有效性,通过对铲片参数的优化达到有效减小挖掘阻力和整机能耗的效果。
1 移树机铲片组的工作原理与受力分析
树木移植机铲片组结构简图如图 1所示,其主要由悬挂架1、开合油缸2、开合架3、铲片4和滑动导轨5组成。树木移植机工作时,先打开开合架,然后移动移植机使苗木位于铲片组的正中央,再关闭开合架,控制液压油缸使4个铲片依次切入土壤,将苗木与土壤分离,最后操纵树木移植机大臂机构将铲片组和土块包裹的苗木抬升一定高度,将移植机开到指定地点,卸下苗木,完成移植。

图1 铲片结构及参数示意图Fig.1 Diagram of shovel structure and round angle
铲片在切入土壤过程中受力情况很复杂,且铲片在切削土壤及苗木根茎时需克服较大阻力,导致铲片发生微小变形,应力分布情况复杂[12]。另外,由于受到土壤力学研究水平的限制,传统的理论方法并不能准确求解铲片在工作过程中所受阻力[13]。因此,理论计算通常采用以相似理论为基础的模型试验建立的铲片切削阻力经验公式[14~16]。

式中F为铲片的受力,kN;X为铲片切削位移量,mm;γ为土壤密度,g/cm3;C为土壤内聚力,Pa;β为铲片围角的半角,(°)。
但这种理论计算所得结果并不能准确反映铲片在切削土壤过程中真实的受反情况,因此不能作为结构设计的依据。本文运用 ANSYS软件模拟铲片切削土壤的过程,然后运用软件LS-ProPos中直观分析铲片各个部分的受力情况,以此确定铲片的最大和最小受力点,为铲片的改进设计提供数据和理论依据,并且预测铲片可能出现的问题。
2 铲片切削土壤过程的数值优化
2.1 切削模型建立
选择合理的土壤本构模型,对于保证铲片切削土壤过程仿真分析的正确性具有重要意义[16~18]。本文选用ANSYS/LS-DYNA提供的第 147号材料,即 MAT147(MAT_FHWA_SOIL)材料模型,这是一种适用于实体单元、考虑损伤的各向同性材料模型。本文对试验场地土壤进行实际测量所得的部分土壤模型参数值如表 1所示,其余参数取值参照 LS-DYNA971关键字手册中的*MAT_FHWA_SOIL模型。土壤单元类型选用 3D Solid 164单元。

表1 土壤模型的主要参数Table 1 Main parameters of soil model
在 Solidworks中建立弧形铲片及土壤三维模型,如图2所示。铲片组采用四瓣式,即铲片围角的半角β=45°,铲片厚度为0.8 mm。运行ANSYS15.0,导入已完成的三维模型。单元类型选用Thin shell 163单元,铲片材料设定为线弹性材料Elastic模型,铲片材料为钢材,仿真时材料参数依次输入:密度为7.85E+03 kg/m3、弹性模量为 2.1E+11 Pa、泊松比为 0.3(文中采用 g-cm-s单位制)。

图2 铲片与土壤模型Fig.2 Model of shovel and soil
2.2 数值分析的条件设定
网格划分时,土壤采用六面体网格绘制,手动控制线条单元个数,铲片采用四面体网格绘制,手动设置单元体的大小,网格划分后的模型如图 3所示[19]。为了得到更准确的仿真结果,必须固定土壤单元,使其在切削过程中不会窜动,故设置土壤单元底面自由度为全约束[20~21],为了使土壤模型能达到无限大地面的效果,对土壤模型四周采用无反射边界条件约束。在LS-DYNA中设置铲片与土壤之间为面面接触的侵蚀分析,即ESTSEroding类型,该接触类型为当单元可能失效时所用的接触,目的是在模型外部单元失效被删除后,剩下的单元仍会接触。

图3 铲片与土壤网格模型Fig.3 Gridding model of shovel and soil
因铲片为弧形铲,不能直接设定其直线速度,文中设定铲片为匀转速运动,角速度为0.108 rad/s,求解时间为 2 s,根据挖树的工作要求直径为 1 m,挖出土块近似为球形,根据铲片是四瓣型且其支撑滑轨面弧度值为0.247,设定铲片入土深度为350 mm,当达到指定入土深度时,计算自动停止。
2.3 数值优化及结果分析
2.3.1 铲片切削土壤最佳入土角的确定
铲片匀速切削土壤,在0 s时尖端首先接触土壤(如图3所示),随着铲片与土壤的接触面积逐渐增大,铲片对土壤的剪切和挤压作用增强,致使与其直接接触的土壤单元遭到破坏而失效变形[22~27]。通过后处理软件LS-ProPost查看计算结果,结果显示在铲片切削土壤的过程中,铲片切削过程中土壤相对于铲片是沿铲片表面向上滑动,同时受到前方和上部土壤压力及铲片的挤压,促使土壤应力集中在刃口上部而不是在铲片刃口处。
在其他条件不变的情况下,只改变铲片的入土角,分别求解一定范围内入土角不同时铲片受力情况,其求解结果如表2所示。由表2可知,当铲片的入土角度为83°时,铲片所受土壤最大瞬时反作用力最小,平均反作用力也最小。在铲片入土角度为83°条件下,铲片入土过程的受力情况如图4所示,横坐标表示铲片的运动时间,1.27 s之后铲片受力不再变化,此时铲片入土深度已达到设定值350 mm,计算停止。
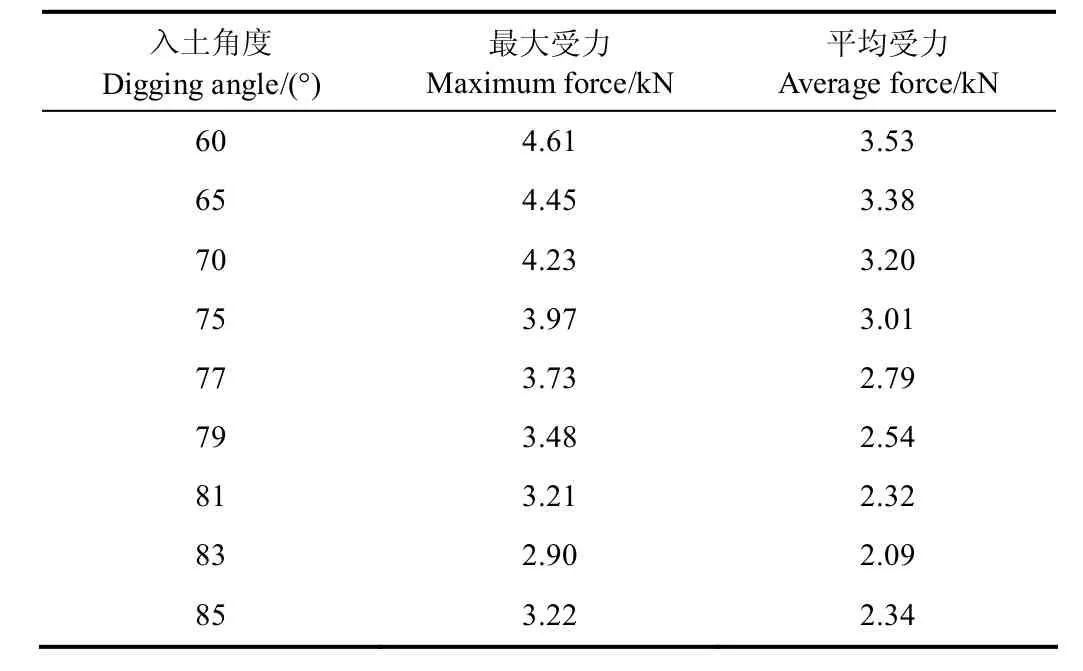
表2 不同切削角度时铲片受力情况Table 2 Force of shovel at different digging angles
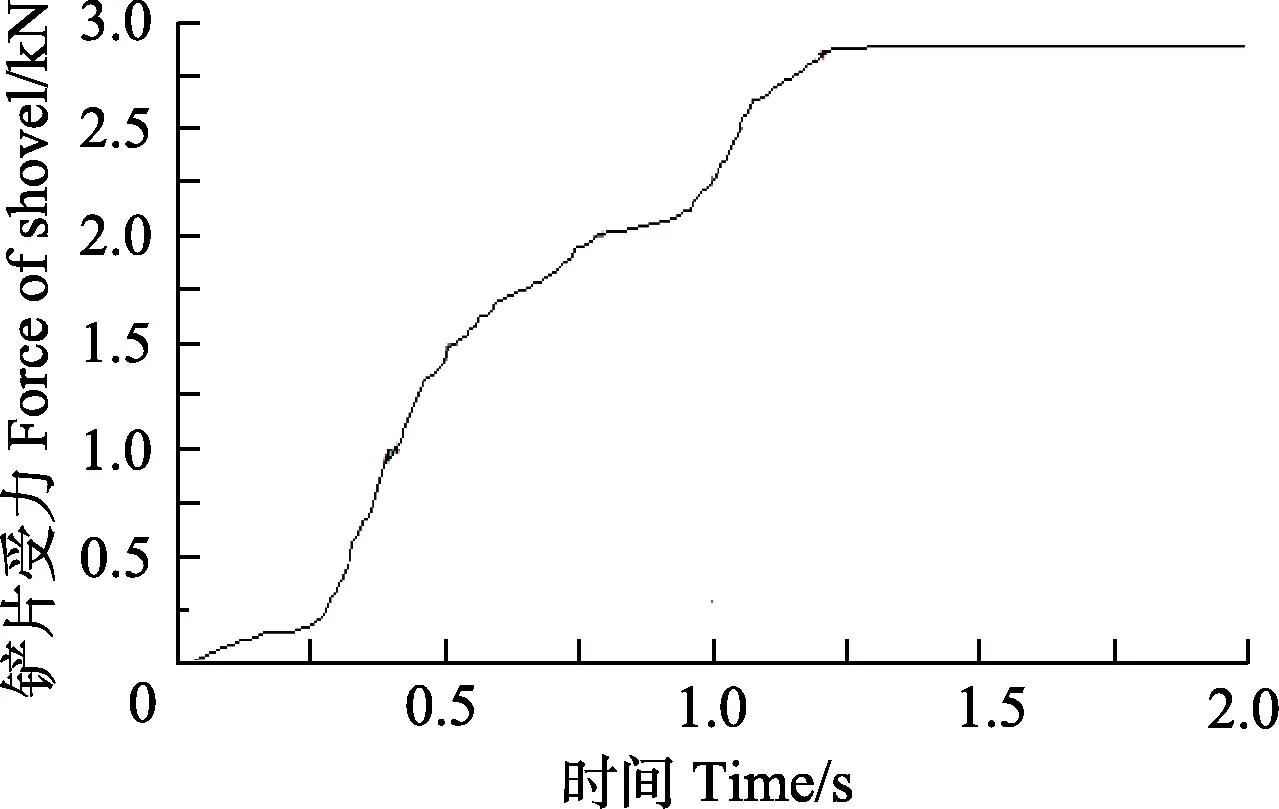
图4 切削角为83°时铲片受力图Fig.4 Diagram of shovel force when digging angle is 83°
2.3.2 铲片外形的仿生设计
为了减小铲片在切削土壤过程中所受阻力,仿照土壤动物步甲的掘土器官大颚的体表结构,在原有铲片表面设计球冠形的凸起,以起到减小铲片与土壤的接触面积从而减小铲片切削阻力的作用。步甲大颚体表的凸起单元分布较为杂乱,根据铲片的实际工作情况,设计中选取凸起按矩形分布,凸起的尺寸包括凸起的高度、凸起的直径和凸起中心距。建立如图 5所示的仿生铲片模型,通过仿真计算发现,凸起的高度超过4 mm以上,对铲片减阻没有明显影响,故选择凸起高度为4 mm,以方便铲片加工。为了确定凸起直径和中心距,对这 2个因素进行正交试验,通过ANSYS/LS_DYNA软件虚拟仿真铲片切削土壤的过程,从而求解铲片所受土壤反作用力,仿真中铲片入土角设定为83°,表3给出了不同凸起直径和中心距条件下仿生铲片最大受力和平均受力的情况。

图5 仿生铲片三维模型Fig.5 3D model of bionic shovel
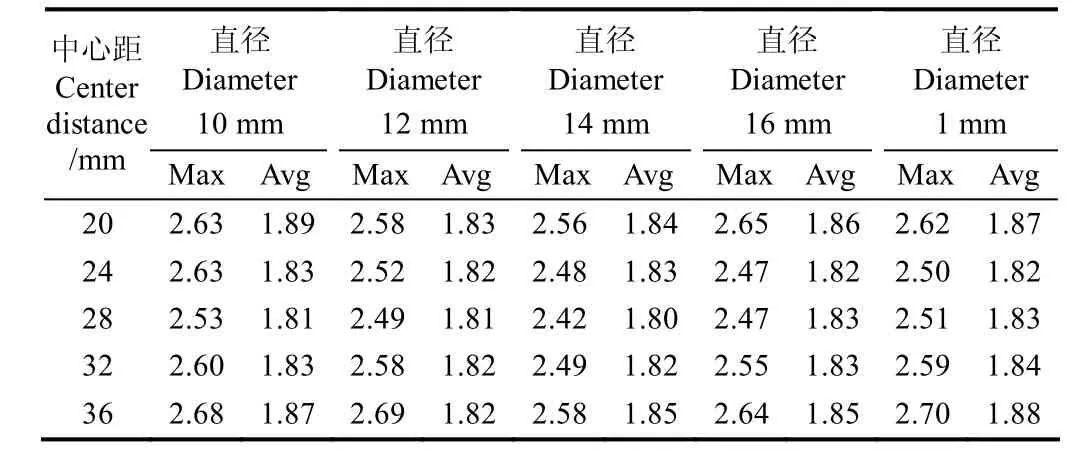
表3 仿生铲片受力最大值和平均值Table 3 Maximum and average force of bionic shovel kN
由表3可知,当铲片表面凸起直径为14 mm、凸起中心距28 mm时,铲片所受瞬时最大作用力最小,平均作用力也最小。将原型铲片和仿生铲片的计算结果导出,以铲片平均受力为参考,运用MATLAB软件绘制出图6所示的铲片受力对比图。由图6可知,与原型铲片相比,仿真结果证实仿生铲片相比原型铲片有效减阻13.88%。

图6 铲片受力对比图Fig.6 Comparison diagram of shovel force
3 铲片试验测试与分析
3.1 试验条件与测试方法
根据仿真结果研制仿生铲片如图7a所示,铲片表面凸起为球冠形,高度4 mm,凸起直径14 mm,凸起中心距 28 mm,将仿生铲片安装在树木移植机样机上进行移植作业对比试验,试验地点选为校内的一处园林,上文仿真所用土壤模型的主要参数也是取自此处土壤实测所得,综合考虑铲片尺寸和树枝的分叉程度,为避免损坏枝叶,试验选取主杆直径小于10 cm的树木进行挖掘。由于铲片要深入土壤作业,用普通的测力传感器测其受力比较困难,若在铲片表面黏贴应变片,应变片会在切削土壤的过程中变形,且铲片每个部位的受力大小不同,无法准确测量其受力情况。因此,文中通过测量驱动铲片的液压缸压力来间接反映整块铲片的受力情况,即铲片受力等于液压缸进油口压力与进油口面积的乘积。数据测量采用型号为 SR-PPT-600-05-OC的雷诺-流量/压力传感器,量程为60 MPa,测量误差小于0.3 MPa;数据采集设备采用型号为TAQ2-480的雷诺-智能液压测试仪,其每秒最高可获取25万个数据样点。
试验中通过流量/压力传感器在液压缸进油口测得流量和压力,再通过数据线导入液压测试仪,分析计算得到液压。计算机再通过数据线采集得到液压测试仪的数据,并通过数据分析软件AMEsim得到试验结果进行比较,测试流程如图7c所示。

图7 铲片试验设备与流程图Fig.7 Diagram of shovel test equipment and test flow
试验重复 5次,用同种型号的压力传感器对驱动原型铲片和仿生铲片的液压缸进行进油口压力测量,并采集保存测量结果,将 5次测试所得数据导出求平均值,由公式FPs=(其中F为铲片受力,N;P为液压缸进油口压力,MPa;s为液压缸进油口面积,m2,直接测量得到)计算得到铲片受力值。
3.2 测试结果与分析
5次试验测试结果见表4。

表4 园间测试对比结果Table 4 Comparative results of garden tests kN
将 5次测试所得数据导出求平均值,仿生铲片的最大受力为 2.474 kN,比原型铲片的 2.783 kN减小0.309 kN,平均受力减小了0.512 kN,以仿生铲片与原型铲片测试结果绘制图8所示曲线,图8可见,仿生铲片整体上受力较小,最大受力值降低了 11.11%。将仿生铲片的测试结果与仿真结果绘制曲线如图9所示,图9可知,数值计算结果与试验测试结果存在一定误差,误差的产生的原因主要有:试验中操作人员通过手柄操作控制铲片近似匀速切入土壤,与仿真条件略有偏差;土体受力产生了变形对铲片的受力起到卸载作用, 使得试验土壤与数值计算所用土壤模型有所差别。

图8 原型铲片和仿生铲片的试验受力曲线Fig.8 Experimental force curves of original shovel and bionic shovel

图9 仿生铲片仿真与试验受力曲线Fig.9 Simulation and test force curve of bionic shovel
4 结 论
1)应用Solidworks、ANSYS/LS-DYNA软件建立铲片与土壤相互作用的数值计算模型,仿真计算了铲片在切削土壤过程中受力随时间的变化情况。通过铲片在不同切削角时受力分析,得到最优的铲片切削角为83°。
2)仿照土壤动物步甲的掘土器官大颚的体表结构设计新型仿生铲片。在铲片切削角为83°及其它条件不变的情况下,通过数值优化得到仿生铲片最佳参数为:表面凸起直径为 14 mm,凸起中心距为 4 mm,凸起高度为4 mm。
3)根据最佳参数研制仿生铲片,将仿生铲片安装在已有的树木移植机样机上进行移栽作业对比试验,测试结果表明仿生铲片能有效减小阻力 11.11%,说明所设计的仿生铲片具有较好的减阻效果。
[1]李春高. 我国造林机械的现状及发展趋势[J]. 林业机械与木工设备,2012,40(10):4-10.Li Chungao. Status and development trend of China’s afforestation machinery[J]. Forestry Machinery &Woodworking Equipment, 2012, 40(10): 4-10. (in Chinese with English abstract)
[2]武广涛,俞国胜,李美华. 国内造林机械及发展前景[J]. 林业机械与木工设备,2003,31(11):4-5.Wu Guangtao, Yu Guosheng, Li Meihua. Planting machines in China and development trend[J]. Forestry Machinery &Woodworking Equipment, 2003, 31(11): 4-5. (in Chinese with English abstract)
[3]于晓旭,赵匀,陈宝成,等. 移栽机械发展现状与展望[J].农业机械学报,2014,45(8):44-53.Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Current situation and prospect of transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53. (in Chinese with English abstract)
[4]赵德金,艳玲,文龙. 国内外树木移植机械的研究现状与发展趋势[J]. 安徽农业机械,2014,42(18):6064-6067.Zhao Dejin, Yan Ling, Wen Long. Current research situation and development trend of tree spade at home and abroad[J].Journal of Anhui Agricultural Science, 2014, 42(18): 6064-6067. (in Chinese with English abstract)
[5]张英彦,顾正平. 直铲式树木移植机下铲阻力的探讨[J].北京林业大学学报,1988,10(2):38-45.Zhang Yingyan, Gu Zhengping. Research on the spading resistance of the straight-spade-typed tree transplanter[J].Journal of Beijing Forestry University, 1988, 10(2): 38-45.(in Chinese with English abstract)
[6]宋海兵,王春宏. 树木移植机下铲过程土壤与铲刀接触受力分析[J]. 林业机械与木工设备,2013,41(2):42-43.Song Haibing, Wang Chunhong. Analysis of the force applied on the spade of a tree transplanter during its contact with soil in the digging process[J]. Forestry Machinery &Woodworking Equipment, 2013, 41(2): 42-43. (in Chinese with English abstract)
[7]孟兆新,王亮亮,范恒博. 基于有限元的树木移植机铲刀挖掘力分析[J]. 森林工程,2014,30(2):75-78.Meng Zhaoxin, Wang Liangliang, Fan Hengbo. Analysis of the force applied on the spade of a tree transplanting machine based on FEM [J]. Forest Engineering, 2014, 30(2): 75-78.(in Chinese with English abstract)
[8]石林榕,孙伟,王蒂,等. 马铃薯仿生挖掘铲片的设计与仿真[J]. 干旱地区农业研究,2014,32(1):268-272.Shi Linrong, Sun Wei, Wang Di, et al. Design and simulation research on the potato bionic shovel[J]. Agricultural Research in the Arid Areas, 2014, 32(1): 268-272. (in Chinese with English abstract)
[9]崔占荣,李建桥,许亮,等. 起垄铲的仿生研究和设计[C]//中国农业工程学会2007年学术年会,2007.Cui Zhanrong, Li Jianqiao, Xu Liang, et al. Design and study on ridging plough by biomimetic[C]// Chinese Society of Agricultural Engineering of 2007 academic conference, 2007.(in Chinese with English abstract)
[10]白景峰,李博,吕秀婷,等. 基于狗獾爪趾的仿生深松铲结构设计与试验[J]. 农机化研究,2016,38(4):175-179.Bai Jingfeng, Li Bo, lv Xiuting, et al. Structural design and test of the badger claws bionic subsoiler[J]. Journal of Agricultural Mechanization Research, 2016, 38(4): 175-179. (in Chinese with English abstract)
[11]刘庆怀,任露泉,陶敏. 凸包形仿生推土板表面的数学建模与优化设计[J]. 工程数学学报,2006,23(1):29-36.Liu Qinghuai, Ren Luquan, Tao Min. Mathematical modeling and optimization design of the convex shape bionic bulldozing plate surface[J]. Chinese Journal of Engineering Mathematics,2006, 23(1): 29-36. (in Chinese with English abstract)
[12]杨文华,陈航. 4YS-600型树木移栽机切铲的有限元分析[J].农机化研究,2008,30(11):57-60.Yang Wenhua, Chen Hang. FEM analysis of the excavator shovel in 4YS-600 tree transplanter[J]. Journal of Agricultural Mechanization Research, 2008, 30(11): 57-60. (in Chinese with English abstract)
[13]齐龙. 基于 ANSYS/LS-DYNA的松土刀切削土壤有限元仿真[J]. 农机化研究,2015,37(7):48-52.Qi Long. Finite element simulation on soil cutting based on ANSYS/LS-DYNA[J]. Journal of Agricultural Mechanization Research, 2015, 37(7): 48-52. (in Chinese with English abstract)
[14]夏哲浩,姚立红,阚江明. 基于ANSYS/LS-DYNA旋转刀具切削土壤与木材的数值模拟[J]. 森林工程,2016,32(1):43-47.Xia Zhehao, Yao Lihong, Kan Jiangming. The numerical simulation of rotating tool cutting soil and wood based on ANSYS/LS-DYNA[J]. Forest Engineering, 2016, 32(1):43-47. (in Chinese with English abstract)
[15]夏哲浩. 基于 ANSYS/LS-DYNA切削土壤与木材的数值模拟与实验分析[D]. 北京:北京林业大学,2016.Xia Zhehao. Based on ANSYS/LS-DYNA the Numerical Simulation and Experimental Research of Cutting Soil and Wood[D]. Beijing: Beijing Forestry University, 2016. (in Chinese with English abstract)
[16]马爱丽. 基于LS-DYNA果园螺旋开沟机模拟试验研究及其优化设计[D]. 武汉:华中农业大学,2008.Ma Aili. Study on LS-DYNA-Based Simulation Experiment and Its Optimization Design for Orchard Spiral Ditcher[D].Wuhan: Huazhong Agricultural University, 2008. (in Chinese with English abstract)
[17]刘辉. 基于LS-DYNA的旱地旋耕刀工作机理研究[D]. 重庆:西南大学,2012.Liu Hui. Study on Working Mechanism of Dry-land Rotary Blade Based on LS-DYNA[D]. Chongqing: Southwest University, 2012. (in Chinese with English abstract)
[18]胡宗政,石林榕,赵武云. 仿生铲的减阻碎土机理及仿真研究[J]. 农业机械,2015,28(17):115-118.Hu Zongzheng, Shi Linrong, Zhao Wuyun. Study on the mechanism and simulation of anti-friction broken soil of bionic shovel [J]. Farm Machinery, 2015, 28(17): 115-118.(in Chinese with English abstract)
[19]邓石桥. 仿生犁壁的减粘机理及其仿生设计[D]. 长春:吉林大学,2004.Deng Shiqiao. The Mechanism of Reducing Soil Adhesion and the Design of Bionic Plow[D]. Changchun: Jilin University, 2004. (in Chinese with English abstract)
[20]Zhiwu Han, Junqiu Zhang, Chao Ge, et al. Anti-erosion function in animals and its biomimetic application[J]. Journal of Bionic Engineering, 2010, 7(4): 50–58.
[21]Luquan Ren, Shiqiao Deng, Jingchun Wang, et al. Design principles of the non-smooth surface of bionic plow moldboard[J]. Journal of Bionic Engineering, 2004, 1(1):9–19.
[22]Zhiwu Han, Wei Yin, Junqiu Zhang, et al. Erosion-resistant surfaces inspired by tamarisk[J]. Journal of Bionic Engineering, 2013, 10(4): 479-487.
[23]Luquan Ren. Progress in the bionic study on anti-adhesion and resistance reduction of terrain machines[J]. Science in China Series E: Technological Sciences, 2009, 52(2): 273-284.
[24]Rashid Qaisrani, Li Jian qiao, Azam Khan M, et al. Soil adhesion preventing mechanism of bionic bulldozing plates and mouldboard ploughs[J]. Advances in Natural Science,2010, 3(2): 100-107.
[25]Bilgin N, Dincer T, Copur H, et al. Some geological and geotechnical factors affecting the performance of a roadheader in an inclined tunnel[J]. Tunnelling and Underground Space Technology incorporating Trenchless Technology Research, 2004, 19(6): 629-636.
[26]Sui Tianzhong, Wang Lei, Tan Zhen, et al. Structural parameters optimization of excavator working device based on mining process[J]. Advanced Materials Research, 2012,421: 759-763.
[27]Luigi Solazzi. Design of aluminium boom and arm for an excavator[J]. Journal of Terramechanics, 2010, 47(4): 201-207.
