基于workbench的动力猫道底座结构改进
2018-08-21李亨涛
李亨涛
(宝鸡文理学院机械工程学院, 陕西 宝鸡 721016 )
0 引言
近年来随着自动化技术水平的提高,我国钻机配套设备进入了高速发展阶段,钻机的自动化程度有了显著的提高。相对而言,对钻机外围配套设备的研究和投入明显不足,钻具排放和上、下钻台操作技术发展相对缓慢[1]。为了减轻钻台工人劳动强度,降低工作危险系数,研究开发了管柱自动化系统,并已经投入生产实践,但在使用过程中发现一些问题,仍需对其进行改进[2]。例如DM4.5-12动力猫道在使用过程中底座出现裂纹。由于猫道底座结构复杂,采用经典计算方法难度较大,无法准确找出薄弱点。本文利用有限元分析方法对猫道底座进行工况分析,提出改进方案,并对不同方案进行对比,得出最佳方案。
1 底座问题及原因分析
动力猫道是一种集机、电、液一体化的高技术自动化产品,具有自动提升和下放钻柱的功能,其结构主要由坡道、猫道、送钻柱装置、液压系统、电控与遥控系统、绳双动绞车及拖链等组成(图1)。通过电液控制完成钻具从猫道到井口以及钻具从井口到排管架的输送工作[3]。
DM4.5-12动力猫道设计用于ZJ90DB9钻机的管柱处理,设计长度为15 m,重33 t。在起吊过程中,底座作为整个猫道的载体,承受猫道整体质量。
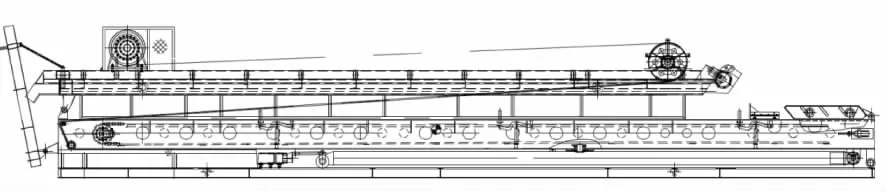
图1 猫道结构图
设计的猫道底座因为需要安装倾斜机构,上部横梁大多采用断开的方式,为其留出安装空间,用斜撑和上部横梁进行固定连接。从现场作业的情况发现,安装倾斜机构附近的上部大梁和斜撑焊接部位出现裂纹(图2),对猫道整体结构和安全造成隐患。根据猫道的使用情况,初步认为是在吊装时猫道底座变形引起焊接部位失效。

图2 现场底座裂缝图片
2 底座有限元分析
为了分析底座裂纹产生的原因,利用大型三维建模软件UG和有限元分析软件Workbench 对整个猫道底座进行建模和有限元分析。Workbench具有强大的有限元分析能力,能够自动建立接触面,省去了逐一添加接触面的麻烦,提高计算效率[4]。
2.1 底座有限模型
针对底座的变形进行分析。在建立模型时为了减小模型规模,节省计算时间,只对底座进行全尺寸建模,移除坡道、猫道、送钻柱装置等设备,对其质量使用载荷进行代替,并且赋予底座的材料属性。底座主要由方钢和工字钢组成,其中方钢材料为20钢,根据机械手册查得其屈服强度为Rel=215MPa,抗拉强度Rm=340MPa,工字钢材料为Q235,屈服强度为Rel= 235MPa,抗拉强度Rm=370MPa[5]。
底座有限元模型实体单元网格划分如图3所示。由于整个模型尺寸较大,结构较为复杂,采用逐一划分工作量较大,采用Workbench中的网格自动划分技术对其进行网格划分,全局网格单元长度设置为10 mm,对斜撑等关键部位网格单元长度设置为5 mm。对划分后的网格进行检查,显示无失败单元,网格划分成功。
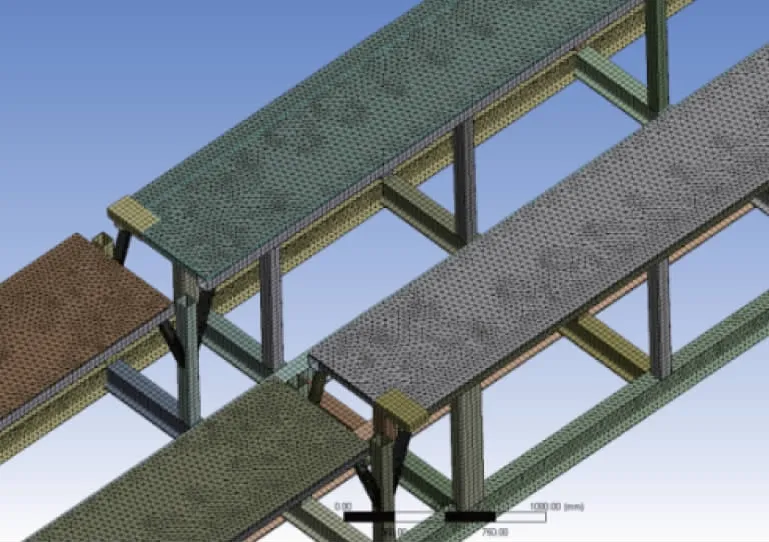
图3 网格划分结果
2.2 载荷施加及边界条件
在建立模型时为了计算方便,移除坡道和送钻柱装置等装置。计算时按照装置的实际质量对底座添加载荷,载荷位置依据吊装时各装置所处的实际位置确定(图4)。底座载荷情况是:1) 重力加速度为9.8N/kg;2) 底座两端施加载荷大小为76 607N(送钻柱质量);3) 底座承受上表面载荷大小为67 444N(坡道质量);4) 底座前部两面分别加载载荷为3 430N(绞车质量)。
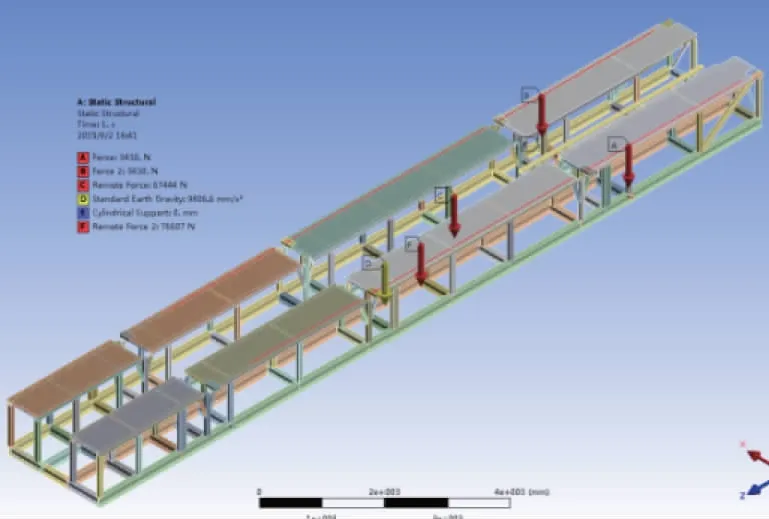
图4 载荷和约束
底座为整体焊接件,结构件之间采用绑定约束[6];在起吊时钢丝绳作用点在4个吊环上,钢丝绳和地面呈60°角,所以对4个吊点添加销钉约束,约束法线方向和地面为60°。
2.3 结果分析与讨论
底座应力云图5所示,底座在载荷的作用下,最大应力出现在底座前端,最大值为820 MPa。斜撑和上部横梁接触位置的应力在250 MPa以上,有的区域甚至达到了500 MPa以上,超出材料的抗拉强度和屈服强度,并且其所处区域和现场断裂位置相符。从应变云图6中可以看出,猫道在起吊时,底座的变形呈波浪形,最大应变发生在底座前端,最大变形为18 mm。
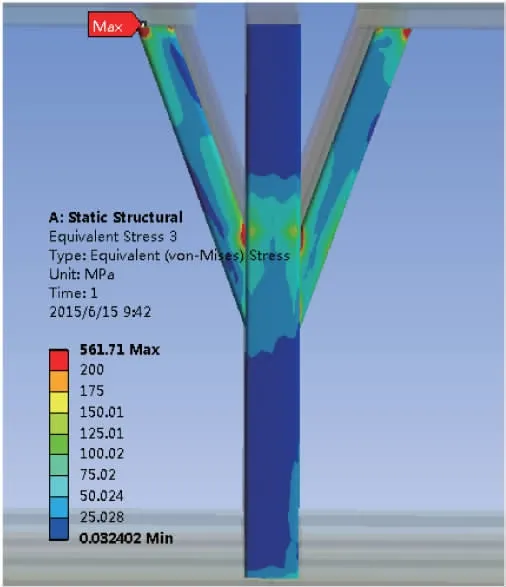
图5 应力云图
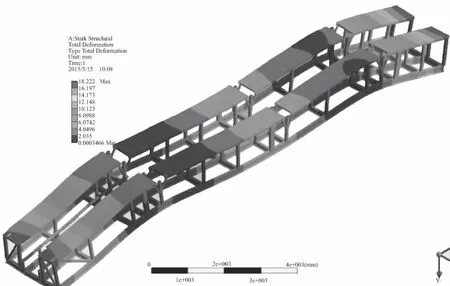
图6 应变云图
底座断裂原因分析:由于送钻柱装置的质量作用于底座大梁两端,致使大梁两端发生较大弯曲,再加上底座的重力使底座中间位置向下弯曲,造成底座呈波浪变形。这种波浪变形使斜撑向外张开,造成斜撑和横梁之间断裂。
从上述分析可知,底座的断裂问题主要是因为上部横梁断裂处的强度不够,需要加强上部横梁断开处的强度。
3 底座加强方案设计和选择
针对底座出现的断裂现象,依据上面的分析结果和现场情况,提出3种结构改进方案:
1) 在斜撑旁边再添加一组斜撑(80mm方钢),增强上部横梁的抗弯强度,如图7(a)所示;
2) 在横梁断开处焊接加强板(8mm钢板),提高上部横梁和底座的完整性,如图7(b)所示。
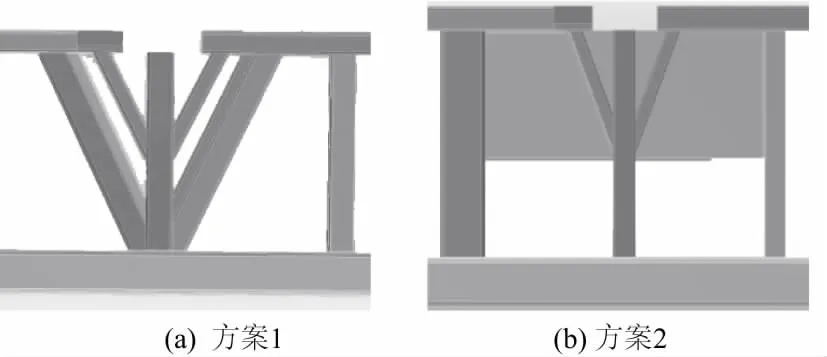
图7 底座加强方案
从应力云图和应变云图(图8、图9)中可以看出,这两种加强方案相对于原方案,应力和应变都得到大幅改善。
方案1中底座的最大变形为14.36mm,斜撑和上部横梁之间的接触应力值大多处于215MPa以上,大于材料的屈服极限,致使斜撑在吊装过程中发生塑性变形,不满足设计要求。
方案2中应变云图和应力云图(图9)可以看出,底座最大变形为9mm,斜撑和上部横梁之间的最大应力为106.5MPa,小于材料的屈服极限和拉伸极限,满足底座的设计要求。
综合以上分析,对猫道底座进行整改时,从降低整改难度、减轻猫道质量、方便液压管线布置这3个方面考虑,最终选择方案2作为猫道底座结构的改进方案。
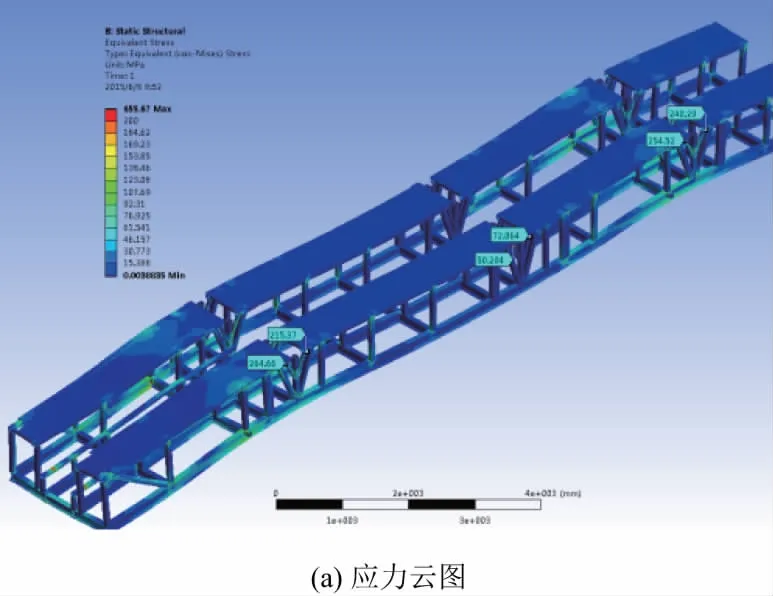
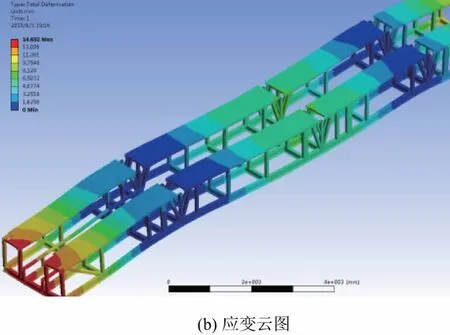
图8 方案1应力应变云图
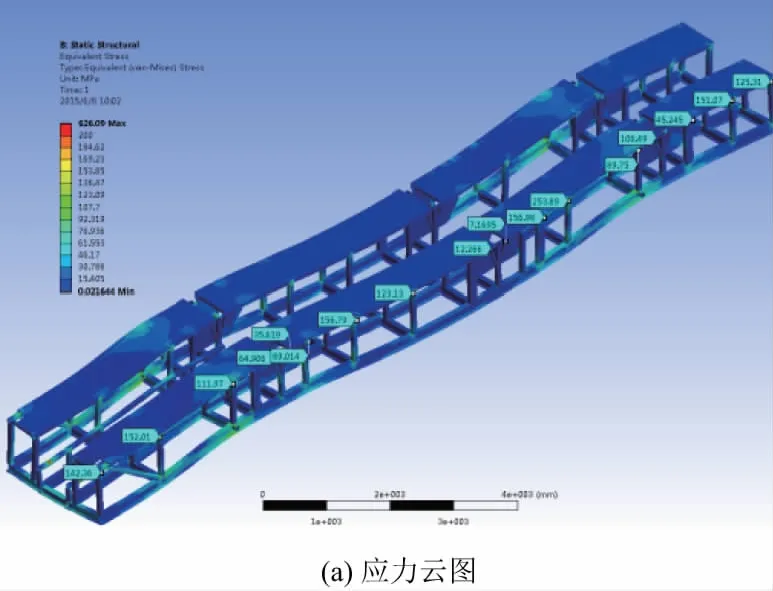

图9 方案2应力应变云图
4 结语
1) 对猫道DM4.5-12的组成结构和工作原理进行介绍,并针对猫道底座的撕裂问题,提出初步的分析与判断;
2) 利用三维模型和有限元计算对底座变形情况进行分析,验证失效原因;并根据失效原因,对底座进行改进;
3) 针对不同方案进行有限元计算和分析,根据计算结果和现场实际情况,确定使用加强板对底座进行改进。
利用有限元对猫道底座进行整改分析,节省了猫道整改时间,节约维修成本,并大大节约了制造成本和人力物力。
