基于中间速度的智能车辆梯形速度规划方法
2018-08-17段建民
段建民,, ,
(北京工业大学 城市交通学院,北京 100124)
0 概述
在智能车自动驾驶实验过程中,由于道路环境的不可控性,智能车行驶的目标轨迹上经常会出现影响车辆行驶的障碍物,通过智能车的局部路径重规划,大部分的障碍物都可以避让过去,但当环境约束较苛刻时,智能车辆就必须进行速度规划以避免碰撞情况的发生[1-3]。
麻省理工学院针对这种情况提出了基于车辆当前位置的纵向速度规划策略[4],并在DARPA挑战赛车辆上进行了应用。该速度规划方法在检测到车辆行驶前方没有障碍物的时候,控制车辆以最高速度行驶,当遇到障碍物的时候,根据当前速度以及与障碍物的距离进行紧急减速停车。文献[5]在此基础上进行了改进,增加了横向动力学条件对期望速度的约束,并在加速段引入了期望加速度概念,能够在期望路径上规划出平滑的期望速度。但该方法根据固定步长将速度离散化,当速度发生变化时,对应变化的步长影响车辆实际速度对期望速度的跟踪[6-8]。此外,由于未考虑障碍物移动的情况,当面临动态障碍物时往往不能规划出理想的结果,导致智能车避撞效果很差乃至避撞失败情况发生[9-10]。
针对上述问题,本文提出一种基于中间速度的梯形速度规划方法。将障碍物速度纳入规划过程,以避免速度规划结果的波动,提高速度规划对障碍物的适应性,同时通过引入中间速度值,提高确定运动状态切换时刻的准确性,增强速度规划结果的平稳性。
1 梯形速度规划算法
梯形速度规划的基本原理如图1所示,设定车辆前方S距离处有一障碍物,因此,智能车需要在S距离处将车速降为0。当S较长时,车辆会以初始速度Vi开始,经过加速段、极速段、减速段,最终以零速度停在S点。车辆设定的最高速度为Vmax。在加速行驶段,如果加速度过大,则会造成轮胎滑移或影响乘坐舒适度,因此,将最大允许加速度限制为aa;在减速行驶段,将最大加速度设定为ad,以保证乘坐的舒适性[4]。
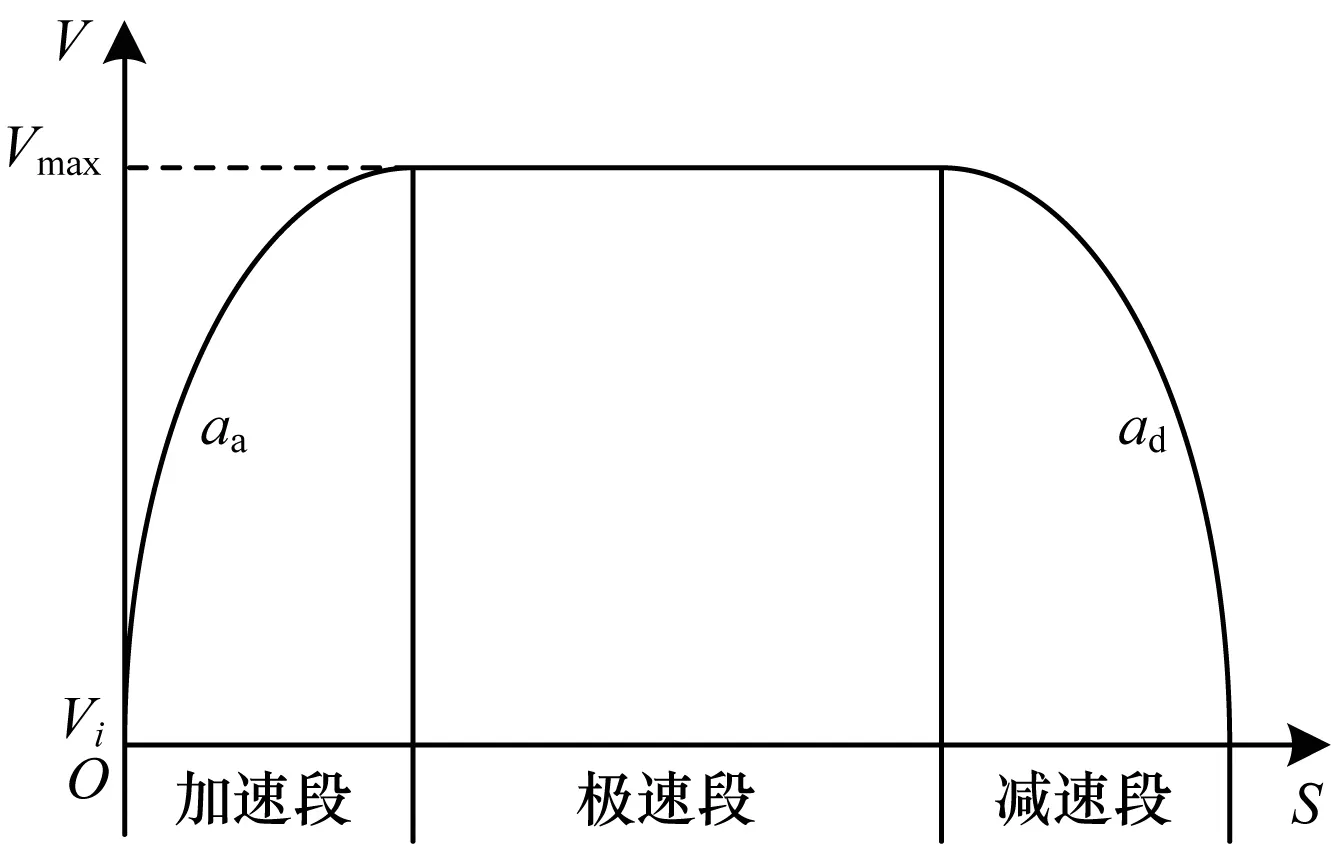
图1 梯形速度规划基本原理示意图
在这种情况下,根据当前车速Vi和期望加速度ad,可以得到加速段、极速段、减速段所需距离的计算公式为:
Sm=S-Sa-Sd
(3)
其中,Sa表示车辆从当前速度加速到最高限制速度所需的行驶距离,当前速度大于最高限制速度时,令Sa为0,Sd表示当前车速直接以期望加速度减速所需的距离,Sm表示车辆以最高限制速度行驶的距离,αVi表示上位机发送制动指令到执行机构执行制动动作过程中车辆行驶的距离,α为制动执行机构延迟时间常数,dextra为考虑半个车身长度情况下车辆停止时与规划终点的距离[11]。
上述梯形速度规划方法对于静态障碍物目标具有良好的速度规划效果。但对于城市结构化道路中行驶的智能车辆,前方障碍物多为行人、车辆等动态障碍物,而该方法对于动态障碍物的跟踪效果并不理想[12-13]。如图2所示,目标障碍物以Vtar的速度向前方移动,车辆从P1起始,目标障碍物位置为方块所示位置,规划距离长度为L1,因此,梯形速度规划的规划结果为黑色曲线,车辆经过加速、匀速、减速后在障碍物后方停车。当车辆行驶至P2位置时,此时车速低于目标障碍物速度。同时,目标障碍物位置变为左侧第2个方块所示位置,此时规划距离长度为L2,经过计算,车辆无法达到最高限制速度,因此,速度规划结果为虚线所示,车辆先加速再减速,根据规划结果,车辆最终在目标障碍物后方停车。当车辆行驶至P3位置时,规划距离长度为L3,此时规划距离长度过短,需要计算紧急制动加速度,并实现减速停车,其规划结果为点画线所示。当车辆减速至低于目标障碍物速度一段时间后,规划距离逐渐增长,速度规划则会改变为类似虚线的先加速再减速停车的规划结果[14]。
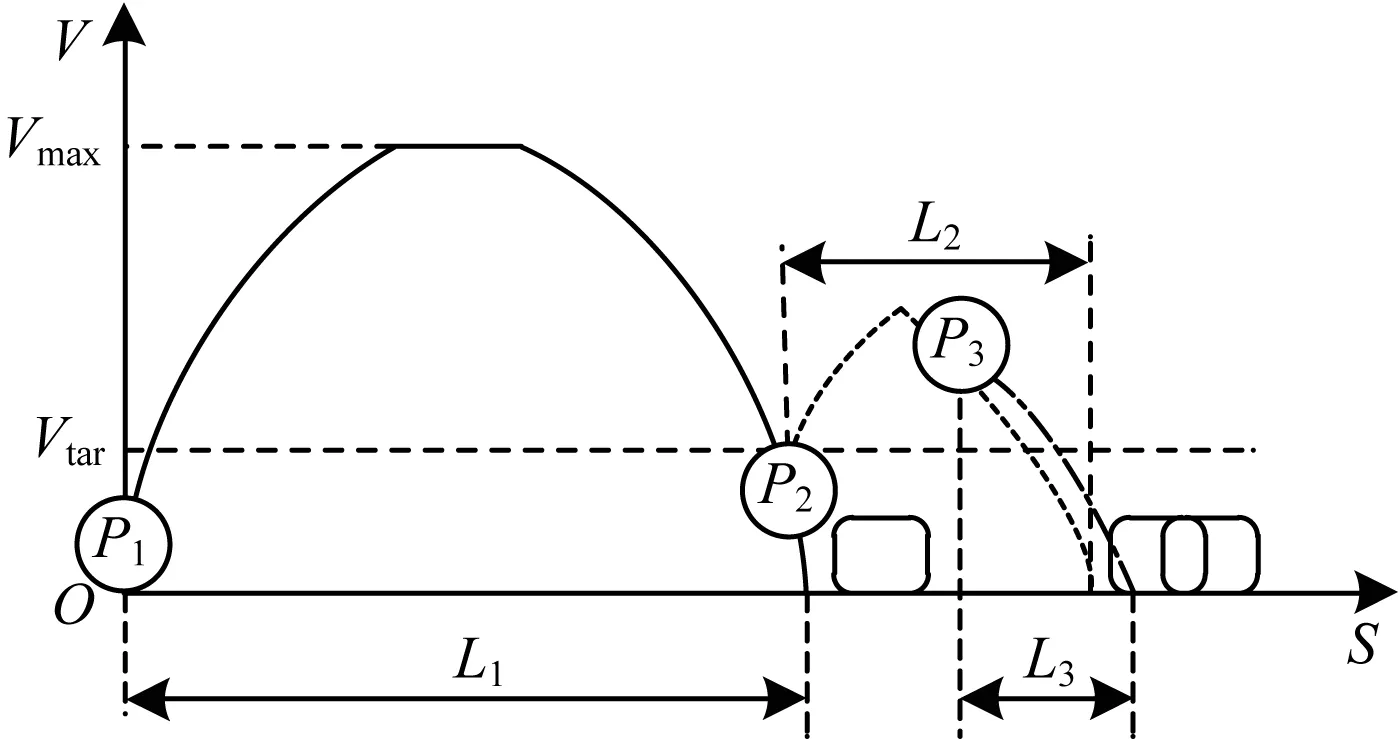
图2 移动目标的梯形速度规划示意图
最终,车辆速度会以目标障碍物速度Vtar为中心上下波动,不存在恒定速度结果,其速度变化曲线如图3所示。同时,车辆与障碍物之间的距离也会随着速度不断变化,影响车辆的通行效率。
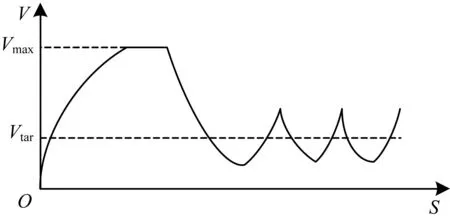
图3 车辆行驶速度变化曲线效果
针对上述问题,本文在梯形速度规划方法的基础上,根据车辆当前速度、车辆与障碍物距离、障碍物速度3个变量,提出动态障碍物的梯形速度规划方法。
2 动态障碍物梯形速度规划
动态障碍物速度规划方法能够根据车载雷达获取障碍物移动速度,合理规划期望速度值,在保证车辆有足够减速距离的情况下,缩短其与动态障碍物的距离,并且使车速与动态障碍物的运行速度保持一致。
2.1 原理分析
2.1.1 动态障碍物速度规划整体分析
在城市结构化道路中行驶的车辆,其行驶方向上的动态障碍物主要为同车道行驶的车辆,因此,动态障碍物的梯形速度规划原则为:在保持安全车距的情况下,尽可能使两车距离缩短,同时保持车辆行驶速度与前车一致。动态障碍物的梯形速度规划结果如图4所示。
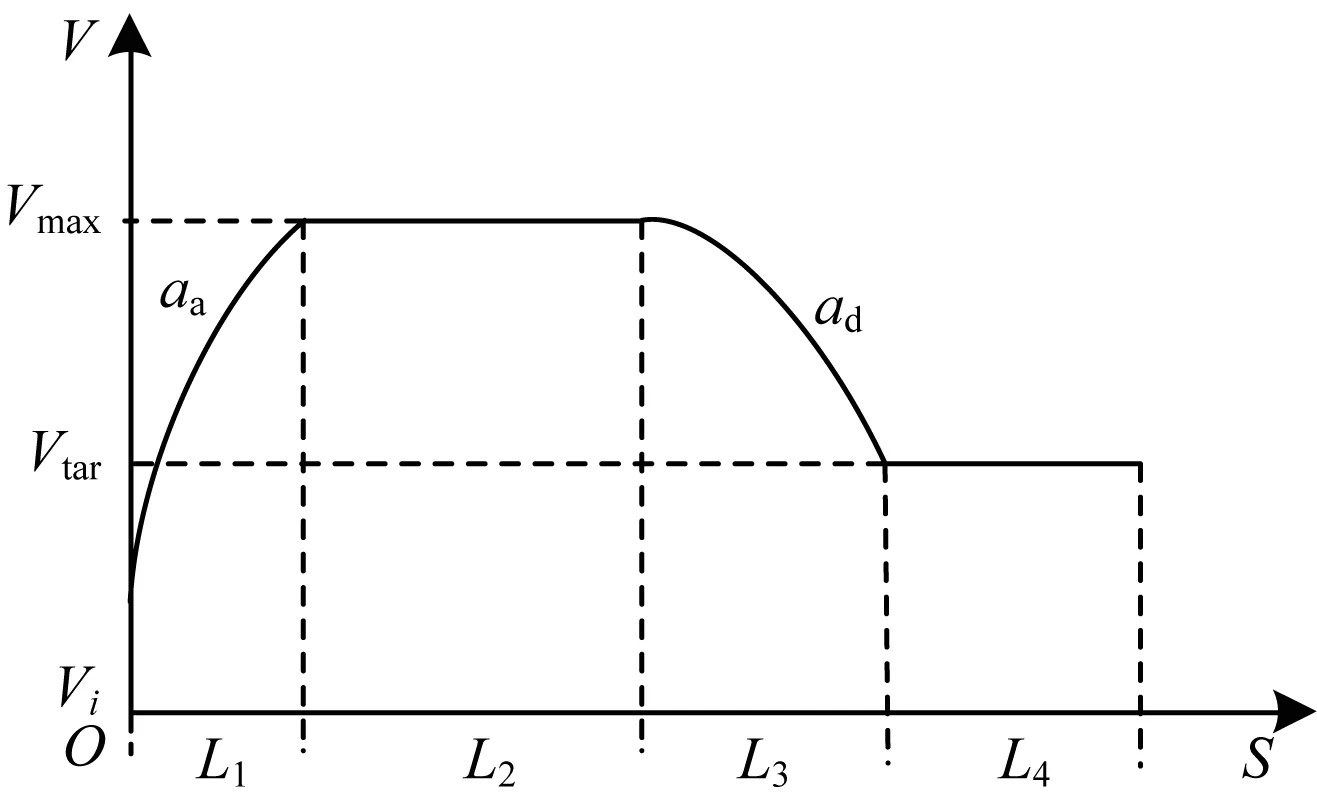
图4 动态障碍物的梯形速度规划示意图
在图4中,L1为车辆加速段行驶的距离,L2为车辆极速段行驶的距离,L3为车辆减速段行驶的距离,L4为与前方车辆速度一致时的安全车距。当智能车与前方车辆保持相对速度为零跟车行驶时,前方车辆突然制动,智能车需要足够的距离减速才能避免碰撞事故的发生。本文假设前方障碍物能够从匀速突然降为零速度停车,那么智能车需要通过减速操作,在距离障碍物一定距离的位置停车,因此,安全车距的计算公式为:
其中,Vtar为前方车辆行驶速度,Ss代表智能车从目标障碍物速度减速停车需要行驶的距离,即安全行驶距离。
2.1.2 中间速度判别法原理分析
本文设计的动态障碍物的梯形速度规划方法,引入中间速度判断步骤,当智能车当前速度低于最大限制速度时,有:
其中,Vm为中间速度,Star为包含障碍物运行距离的规划路径长度,与静态障碍物的速度规划不同的是,动态障碍物的速度规划需要根据障碍物速度预测其行驶的长度,并确定最终的规划路径长度,Sa和ta分别为智能车从当前速度加速至中间速度所行驶的距离和时间,Sd和td分别为智能车从中间速度减速至动态障碍物移动速度所行驶的距离和时间。
根据式(5)可以得到中间速度的计算公式为:
(6)
同理,当智能车当前速度高于最大限制速度时,有:
其中,Sd1和td1为智能车从当前速度减速至中间速度所行驶的距离和时间,Sd2和td2为智能车从中间速度减速至动态障碍物移动速度所行驶的距离和时间。
根据式(7)可以得到中间速度计算公式为:
(8)
根据中间速度Vm、最高限制速度Vmax、智能车当前速度Vi以及目标障碍物速度Vtar四者的关系,可以得到不同的速度规划结果。
2.2 速度规划条件判断
当障碍物速度高于最高限制速度时,车辆以目标加速度加速至最高限制速度即可,此处不再展开;当障碍物速度低于最高限制速度时,判断四者的关系。当Vtar≤Vm≤Vi时,智能车需要通过紧急制动减速至障碍物速度Vtar,此时规划结果如图5所示。

图5 速度规划结果1
在图5中,adexp表示紧急制动的加速度,其计算公式为:
根据得到的期望加速度,可以计算得到减速距离、减速时间、规划路径距离的值,其计算公式为:
令:
则可得到式(12)。
其中,e表示期望速度,i表示不同规划周期。当Vi≤Vmax≤Vm时,智能车存在最高速度情况,故规划结果如图6所示,车辆经过加速到达最高限制车速,经过一段时间的匀速行驶后,减速至Vtar,并以安全车距跟车行驶。
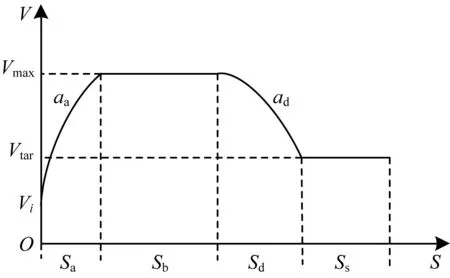
图6 速度规划结果2
根据图6的规划结果,可得到如下计算公式:
根据规划结果,令:
则速度规划计算公式如式(15)所示。
当Vm小于Vmax且大于Vi和Vtar时,规划结果如图7所示。智能车无法达到最高限制速度,因此,先加速到中间速度,再由中间速度减速至Vtar。
图7的速度规划过程可通过式(5)描述,根据规划结果,令:
则可得到式(17)。
当Vtar小于Vmax且Vi≤Vm≤Vtar时,规划结果如图8所示。此时若直接加速行驶,两车相距的安全距离不足,因此,车辆先以当前速度匀速行驶一段距离后,再加速至Vtar。

图8 速度规划结果4
根据图8的规划结果,可得到如下计算公式:
令:
则可得到式(20)。
当Vtar小于Vmax和Vi且大于Vm时,规划结果如图9所示。此情况发生于辆车之间速度相差不多但跟车距离较近的时候。智能车根据安全距离调整车速,先减速到低于障碍物速度的速度,与前方障碍物拉开距离,再加速至障碍物行驶速度,这样可以保证车辆与前方障碍物行驶在安全距离内。

图9 速度规划结果5
根据图9的规划结果,可得到如下计算公式:
令:
则可得到式(23)。
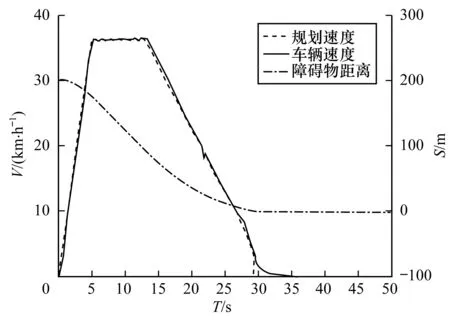
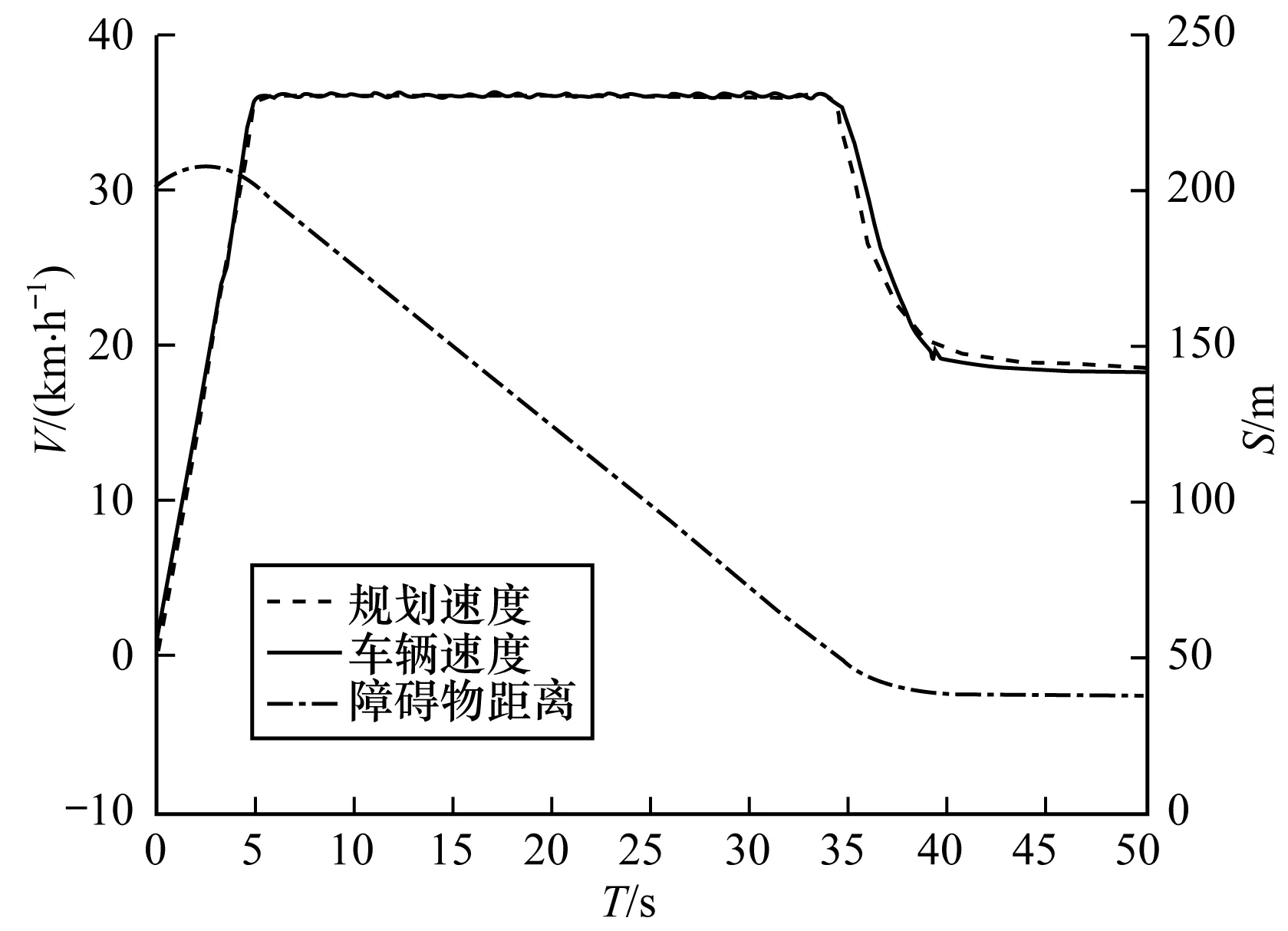
最后,当Vm 图10 速度规划结果6 根据图10的规划结果,可得到如下计算公式: 令: 则可得到式(26)。 至此,动态障碍物的梯形速度规划方法已分析车辆行驶过程中可能遇到的所有情况。本文所改进设计的速度规划方法,不仅对于动态障碍物的速度规划具有良好的效果,对静态障碍物的速度规划效果也未受影响。当障碍物为静态时,相当于障碍物速度Vtar为0,智能车根据改进的速度规划方法,能够在障碍物后方安全停车。当障碍物为运动状态时,智能车根据障碍物运动速度确定安全减速距离,并准确地在障碍物后方的安全距离点,保持与障碍物相同的运动速度,在保证行驶安全的前提下,可以大幅提高车辆通行效率。 将本文提出的改进速度规划方法与未改进的速度规划方法在车辆动力学仿真软件CarSim与Simulink搭建的联合仿真平台上进行仿真对比实验。 CarSim是专门针对车辆动力学的仿真软件,可以仿真车辆对驾驶员、路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性[15]。 这里CarSim主要提供实验车辆的动力学模型,并为模型配置前置雷达,从而提供障碍物的位置和速度信息。整体的仿真流程为:Simulink将CarSim输出的车辆整体信息和障碍物信息传至速度规划算法,速度规划算法将规划出的速度传递给速度控制算法,速度控制算法将对应的油门值和刹车值传递给CarSim车辆模型,从而形成一个闭环控制过程。整个系统结构如图11所示。 图11 仿真系统结构 3.2.1 实验设计 为验证本文提出速度规划方法的规划效果,这里进行了4组实验,分别是传统梯形速度规划方法在静态障碍物和动态障碍物情况下的速度规划及行驶结果,以及本文提出的改进后的梯形速度规划方法在静态障碍物和动态障碍物情况下的速度规划及行驶结果。 3.2.2 实验结果 未改进的速度规划方法在静态障碍物情况下的速度规划及行驶结果如图12所示。在起始时刻,车辆速度为0,静态障碍物位于车前200 m处,此时通过计算加速距离、减速距离与安全距离的和,并与车辆距障碍物距离进行比较可得规划过程存在匀速段,因此,以设定加速度开始加速,在13 s左右由于距障碍物距离不断缩小,车辆开始以设定加速度进行减速规划,在29 s左右速度规划车辆停止在障碍物前。通过规划速度和车辆速度的对比可以看到,车辆的实际速度可以较好地跟随规划速度,表明速度规划出的结果具有较高的可执行性。 图12 传统梯形速度规划方法的静态障碍物实验结果 将障碍物速度设置为5 m/s缓慢向前运动,可以得到如图13所示的规划结果。开始阶段由于车辆速度低于障碍物速度,与障碍物距离被拉大,匀速阶段以设定最大速度进行匀速行驶,在减速阶段,由于未将障碍物的移动纳入速度规划之中,导致速度规划算法不断进行状态调整,不仅损失了车辆速度的稳定性,而且在50 s时仍未进入稳定状态,延长了车辆进入稳定状态的时间。 图13 传统梯形速度规划方法的动态障碍物实验结果 改进的速度规划方法在静态障碍物下的速度规划及行驶结果如图14所示,车辆通过加速、匀速和减速过程,准确地在障碍物前实现停车。 图14 本文速度规划方法的静态障碍物实验结果 改进的速度规划方法在动态障碍物下的速度规划及行驶结果如图15所示,车辆通过加速、匀速和减速过程,准确和障碍物车辆保持在安全停车距离外,并以障碍物的速度行驶,从而保持与动态障碍物之间的安全距离。同时,通过规划速度和车辆速度的对比也可以看到,车辆的实际速度可以较好地跟随规划速度,表明本文所提速度规划方法得到的速度规划结果具有较高的可执行性。 图15 本文速度规划方法的动态障碍物实验结果 3.2.3 结果分析 通过仿真实验结果图12和图14,即改进前后速度规划方法对静态障碍物的速度规划结果可知,改进后的速度规划方法和改进前的速度规划方法在面临静态障碍物时都具有较好的速度规划结果。 通过仿真实验结果图13和图15,即改进前后速度规划方法对动态障碍物的速度规划结果可知,改进前的速度规划方法由于未将障碍物的速度纳入速度规划当中,导致在进行减速跟随的时候车辆速度存在长时间的不稳定状态,而改进后速度规划方法由于纳入了障碍物的速度,因此规划出的速度能够适应障碍物不断移动位置的情况,能够实现平滑地减速并与障碍物稳定维持一个安全距离[16]。 通过实验结果整体的对比可知,改进后的速度规划方法无论是面对静态障碍物或是动态障碍物都能够根据车辆自身状态合理地规划出快速平稳可执行的车辆期望速度,相对于改进前,改进后的速度规划方法在规划过程的快速性、规划结果的有效性和平稳性方面有较大的提高。 针对智能车辆在自主行驶过程中遇到障碍物需要进行速度调整以及安全停车的问题,本文提出一种基于中间速度的梯形速度规划方法,相比于传统速度规划方法,该方法将障碍物速度纳入车辆的速度规划过程中,以中间速度作为速度决策控制的参考量,提高了速度规划过程的平稳性,解决了面对动态障碍物时速度规划结果存在波动的问题。为验证所提速度规划方法的可行性及有效性,在CarSim/Simulink联合仿真平台上进行2组仿真对比实验。通过实验结果可以看出,本文方法能够有效提高智能车辆行驶时速度的平稳性,增强速度规划对障碍物的适应性。今后将在速度规划过程中引入目标障碍物行为预测环节,提前获取障碍物的运动状况,使速度规划更快速、准确,同时根据人体感受修改速度规划过程中的加速度变化,提高智能车的乘坐舒适度。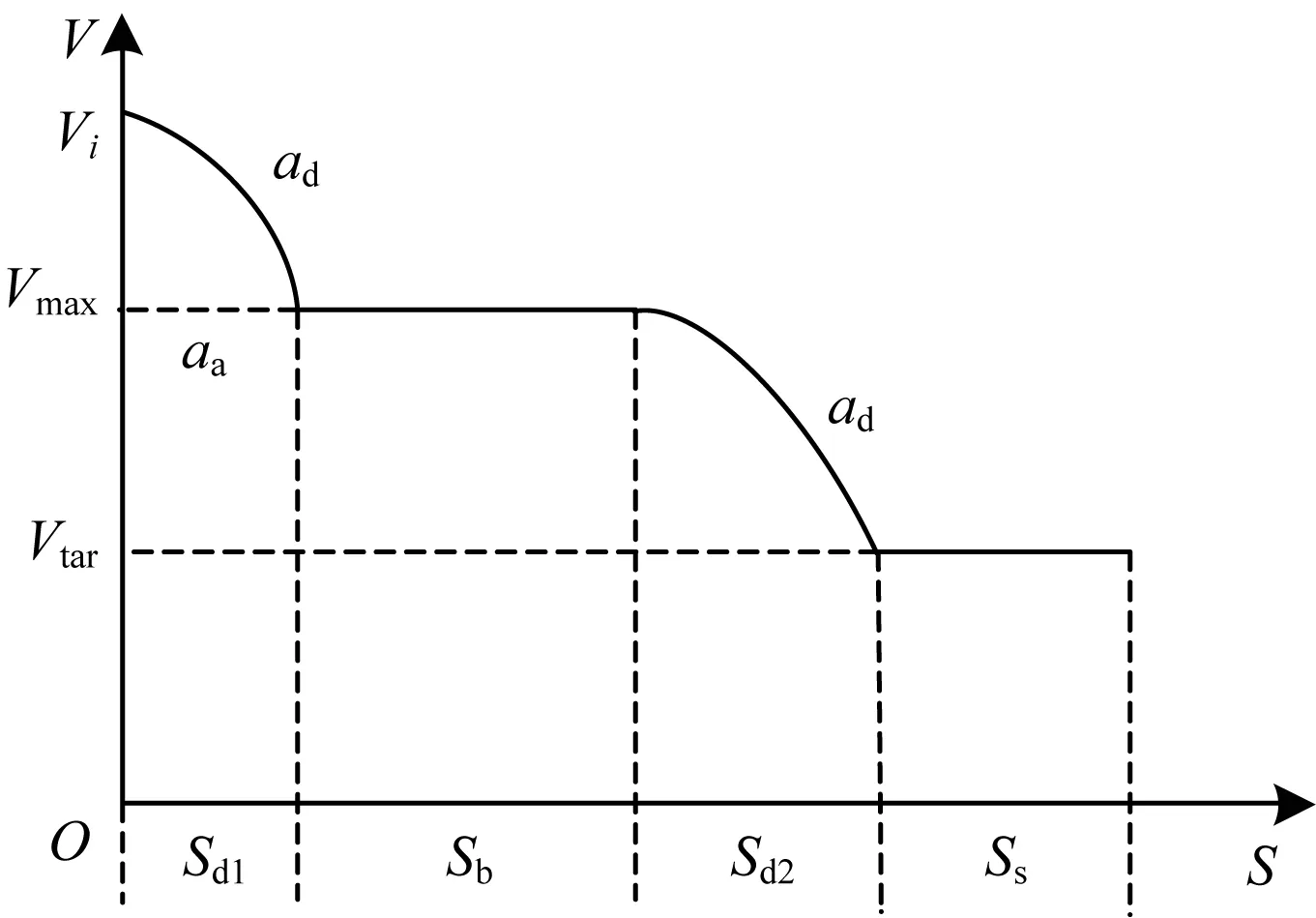
3 仿真实验结果
3.1 仿真平台介绍
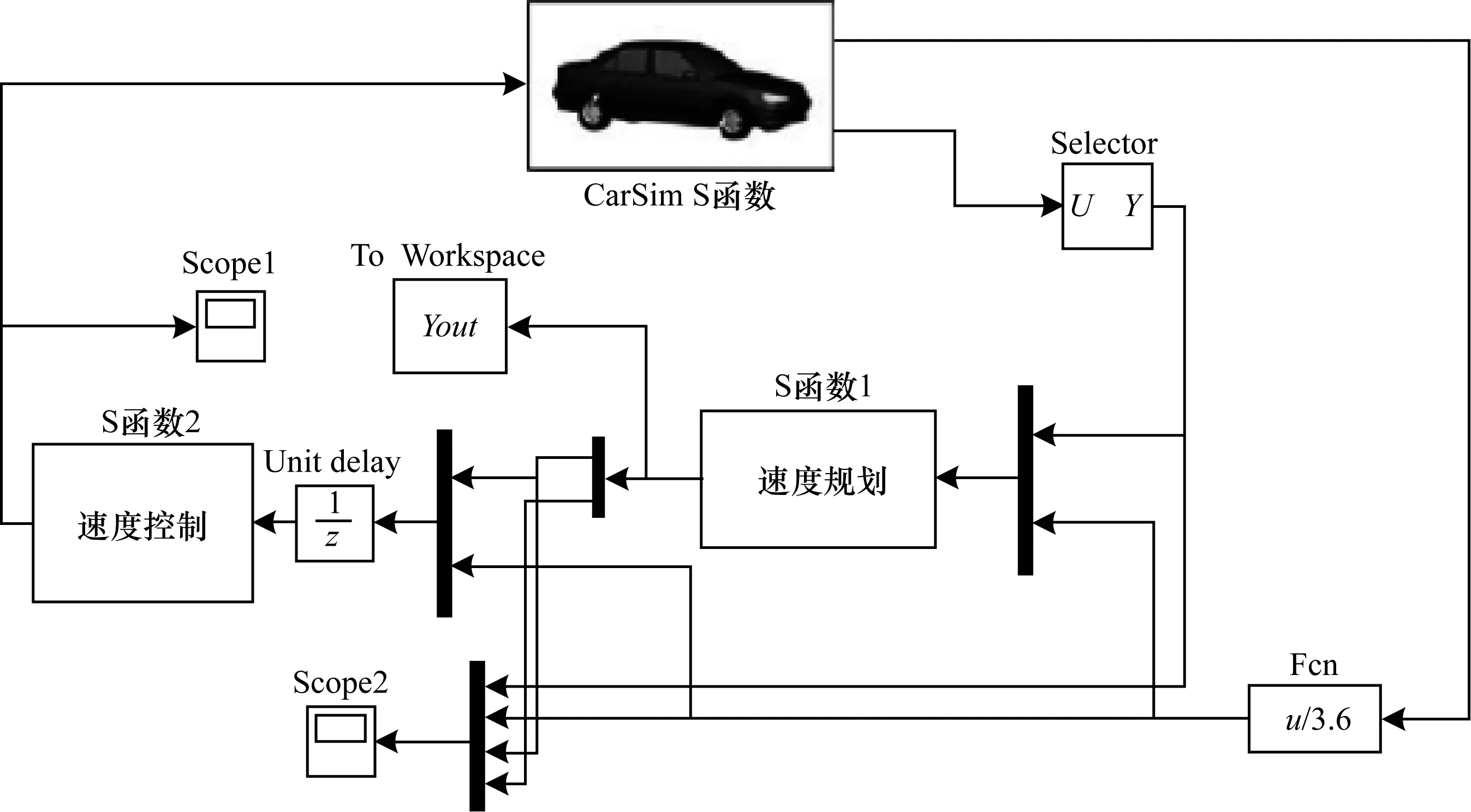
3.2 仿真实验


4 结束语
