无人机倾斜摄影三维模型精度分析
2018-08-16杜猛刘威朱钊
杜 猛 刘 威 朱 钊
(陕西煤田地质勘查研究院有限公司,陕西 西安 710021)
随着我国低空摄影测量技术的飞速发展,无人机倾斜摄影技术以大范围、高精度、高清晰度的方式全面感知复杂场景,在我国智慧城市建设、信息化管理中已广泛应用。该技术颠覆了传统摄影测量影像只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从垂直、倾斜等不同角度采集影像,获取地面物体更为完整准确的信息,以“全要素、全纹理”的方式来获取真实三维模型。
本文基于六旋翼无人机搭载五镜头倾斜摄影相机(焦距20 mm/35 mm,像幅大小23.5 mm×15.6 mm,图像分辨率4 000×6 000,总像素1.2亿),以具体的测区为例,研究无人机在不同相对航高、不同重叠率情况下分别采集影像数据,利用相同控制点影像校准,通过数据预处理、空三建模,对比分析各三维实景模型精度情况。
1 测区介绍
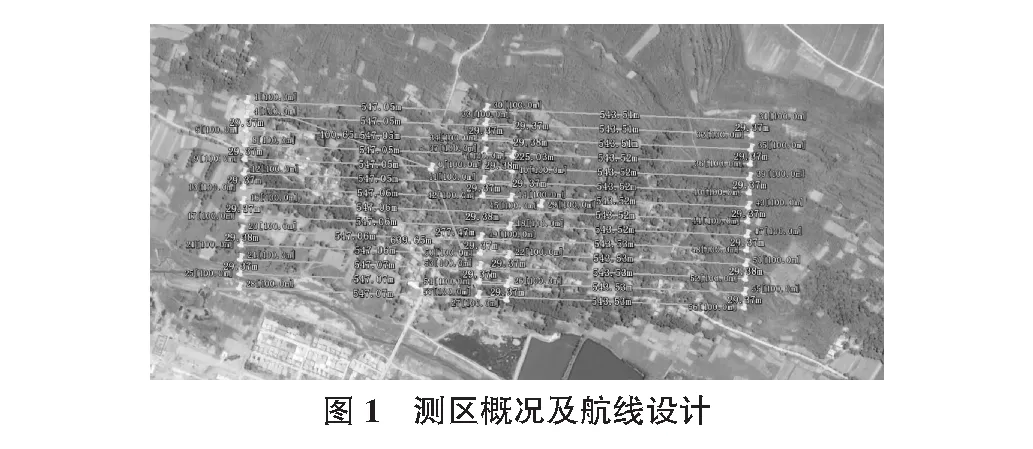
本次实验区位于西安市长安区耶柿坡村,测区是长约1 km,宽约0.5 km的小山村居民区(见图1),面积约0.51 km2。测区地势北高南低,属山地地形,平均海拔536 m,最大高差49 m,区内无高大建筑物,通视情况良好,适合飞行。
2 无人机倾斜摄影
现场踏勘后,在测区中部选择视野好、航程短的开阔地带作为无人机起降场地,鉴于测区北高南低的地形特点,整个测区航线按东西向布设(见图1)。航线规划使用大疆DJ1 4.0地面站软件,确定好相机焦距和传感器尺寸,根据输入的相对航高、航(旁)向重叠率等信息,选择飞行区域,创建飞行计划。为了研究不同相对航高、不同重叠率对模型精度的影响,我们分三次对测区进行飞行作业。各次飞行参数变化情况见表1。
3 像控点测量
像控点尽量选择自然地物点。目标影像应清晰,容易判刺和立体量测,同时应是高程起伏较小、固定且易于准确定位和量测的地方,弧形地物及阴影处等不宜选作点位目标。像控点的施测采用基于基准站网络的RTK定位方法,平面坐标采用1980西安坐标系,高程采用1985国家高程基准。按照GB/T 7931—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量外业规范》规范要求,外业测量人员在测区范围内施测像控点27个,全部为平高点。为了检验模型精度,选取其中18个控制点参与影像校正,其余9个控制点作为检查点进行模型精度检测。
表1 各次飞行参数
4 内业处理
外业数据采集回来后,首先对影像质量、pos数量和影像一致性、像控点质量等进行预处理,检查无误后,编制pos表格,按要求导入Context Capture 4.4软件,在Context Capture中依次进行空三加密、重建TIN、创建白模、纹理映射和三维重建等流程,最终生产出可清晰辨别地物位置和类别信息的三维实景模型成果,模型成果格式为S3C或者3MX,如图2所示。
5 精度分析
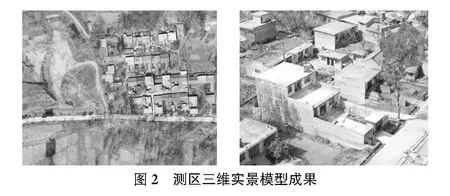
三维实景模型生产完毕后,将上述未参与模型校正的9个控制点作为模型检核点,在Acute3D Viewer软件中分别拾取这些点位X,Y,Z坐标,与控制点成果对比,进行模型绝对精度检核,检验结果见表2。
通过精度统计分析可以得出以下结论:
1)相对航高对模型精度影响较大,相对航高越大,影像分辨率就越低,模型精度也越差。在保证无人机安全作业的情况下,相对航高越小,模型效果就越好,模型精度也越高,当然经济成本和时间成本也大大增加。
2)重叠率对模型精度影响较大,航向重叠率越小,影像拍摄间距就越大;旁向重叠率越小,影像航线间距就越大。降低重叠率,采集的影像越稀疏,生成的模型扭曲变形就越严重,模型精度也就越差。
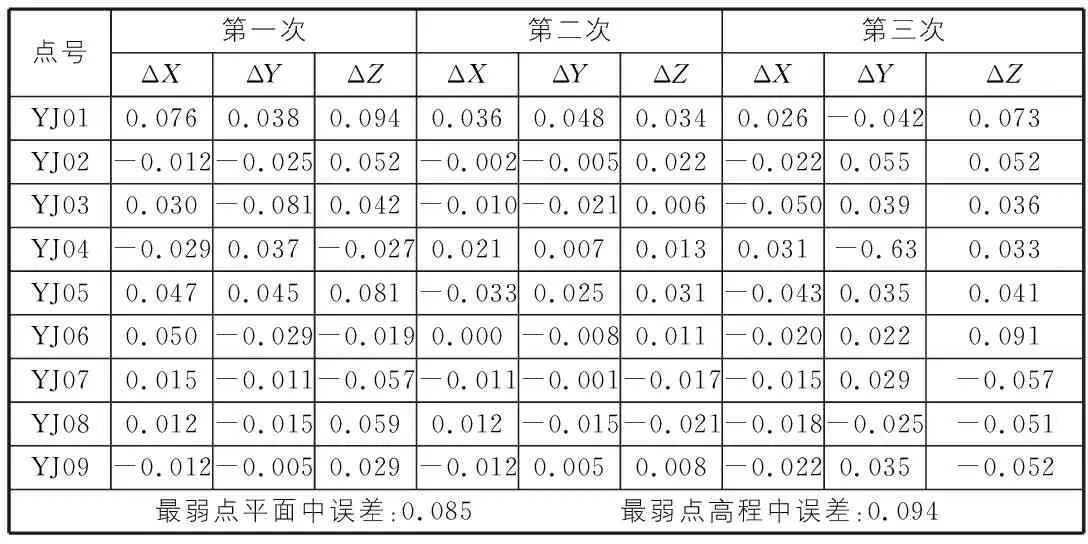
表2 三维实景模型点位精度统计 m
3)像控点分布对模型精度影响最大,像控点越稀疏(YJ01,YJ05周围像控点较少),模型精度就越差,但像控点密度过大(YJ08周围像控点非常多),对模型精度的提高有限。整个测区宜采用格网法布点,且测区各边角附近需要有足够的像控点分布。
4)从表2可知,各倾斜摄影三维实景模型的平面中误差、高程中误差均优于GB/T 7930—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范》1∶500比例尺平地、丘陵地平面位置中误差不大于0.2 m,平地高程中误差在0.2 m以内,丘陵地0.4 m以内的要求,完全可以进行大比例尺DLG的采集生产。
6 结语
本文利用无人机倾斜摄影系统拍摄倾斜影像生成三维实景模型,通过相对航高、重叠率等影响因子对比分析三维模型点位精度,实验证明低空无人机倾斜摄影技术完全可用于1∶500比例尺DLG的生产。
目前,倾斜摄影技术虽处于起步阶段,但其真实性、高效性、高性价比已经是其他航摄遥感技术、传统测量技术无法比拟的。随着技术的革新,倾斜摄影必将替代传统测量手段,在土地调查、城市规划、应急测绘等多方面得到广泛应用。
