改进分水岭算法在固体火箭发动机CT图像处理中的应用
2018-08-16王新军尚煜珂
王新军,尚煜珂,李 平
(火箭军工程大学,西安,710025)
0 引 言
由发动机故障引起的火箭发射失败案例占总案例的1/3[1],因此对火箭发动机的检测意义重大。目前,应用于固体火箭发动机缺陷检测的无损检测方法很多,例如超声[2]、红外[3]、激光全息[4]、X 射线[5]以及工业 CT图像[6]等,其中工业CT图像的检测结果较为理想。但是对于一界面的检测存在边缘效应以及伪影的影响。对于细小缺陷,如细小的一界面脱粘不易检测[6]。分水岭算法的优点是鲁棒性好,其缺点是过分割和对噪声敏感[7]。目前所研究的几种改进算法[8~11]主要应用在医学图像的处理[12]和粘连物体图像分割处理[13]等方面。本文为了更好地对固体火箭发动机 CT图像中缺陷特征进行提取和识别,应用了一种动态合并准则的改进分水岭算法。
1 改进分水岭算法
1.1 动态合并准则
动态合并准则是基于一定结构信息的对图像中灰度差异的一种度量。它测量的是包含极值点的结构而不是极值点本身或者极值点对应流域。由于在动态合并计算中用不到图像的形状和大小等信息,因此不需知道图像的相关先验知识。而很多基于marker的分割方法需事先知道图像中物体的形状、大小等相关信息。动态合并准则的计算没有这个限制,因此具有很好的通用性[14]。
定义两点间的一条路径的动态合并区间,这条路径上最高点与最低点之间的高度差即为动态合并值:

式中 (,)Pxy为x,y之间的路径;sup为上确界; ()fx为x点的灰度值。
为了抑制过分割,需去除不重要的谷底。因此,需要计算的是谷底的动态合并值,如图1所示。
由图1可知,谷底M与另一个谷底灰度值小于M的流域中一点的所有路径中,动态合并值最小的一个就是谷底M的动态合并值,即:式中 ()DM 为谷底M的动态合并值;inf为下确界;分别为谷底高度。

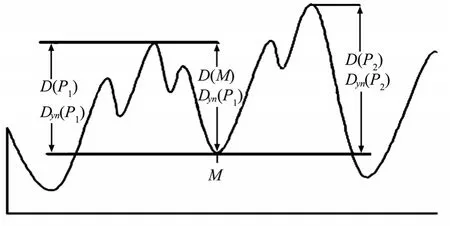
图1 谷底动态合并示意Fig.1 Dynamic Merging of Grain Bottom
图1只考虑一维的情况,1()DP和2()DP分别是左右两个方向不同路径上连接谷底M和比M低的谷底的动态合并值,其中1()DP较小, ()DM=1()DP。二维情况也依照此法,只是需要考虑平面内所有可能的路径。
1.2 对过分割的抑制
对过分割的抑制过程如图2所示。
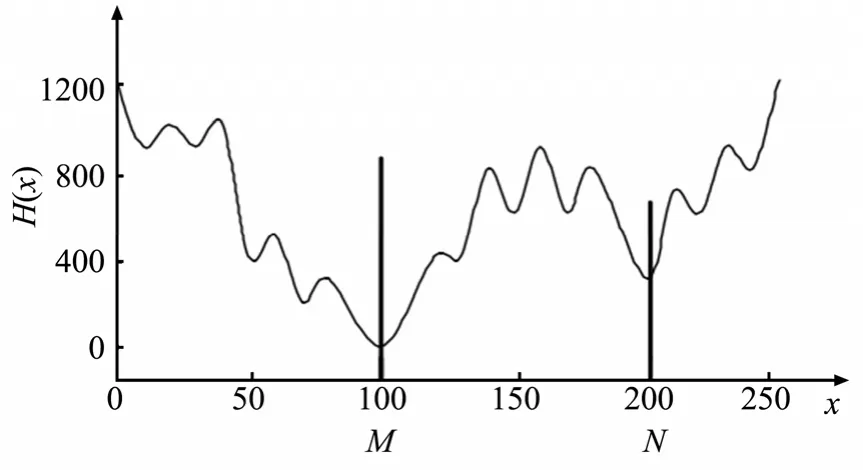
图2 对过分割的抑制示意Fig.2 A Hint of Over Segmentation
由图2可知,在对过分割的抑制过程中存在噪声,受噪声的影响,出现了很多小的假谷底。直接用分水岭算法进行分割时会产生很多小的区域,出现严重的过分割现象。为了抑制过分割现象,可做如下处理:a)分别对各个谷底进行计算,算出其动态合并值;b)根据动态合并准则,将计算出的值标注在图中。
由于噪声所产生谷底的动态合并值很小,而真正的谷底M,N的动态合并值则很大,因此只需设定一个阈值,就可将噪声所产生的谷底滤掉,从而达到抑制过分割的目的。
1.3 改进分水岭算法
改进分水岭算法的流程如图3所示。
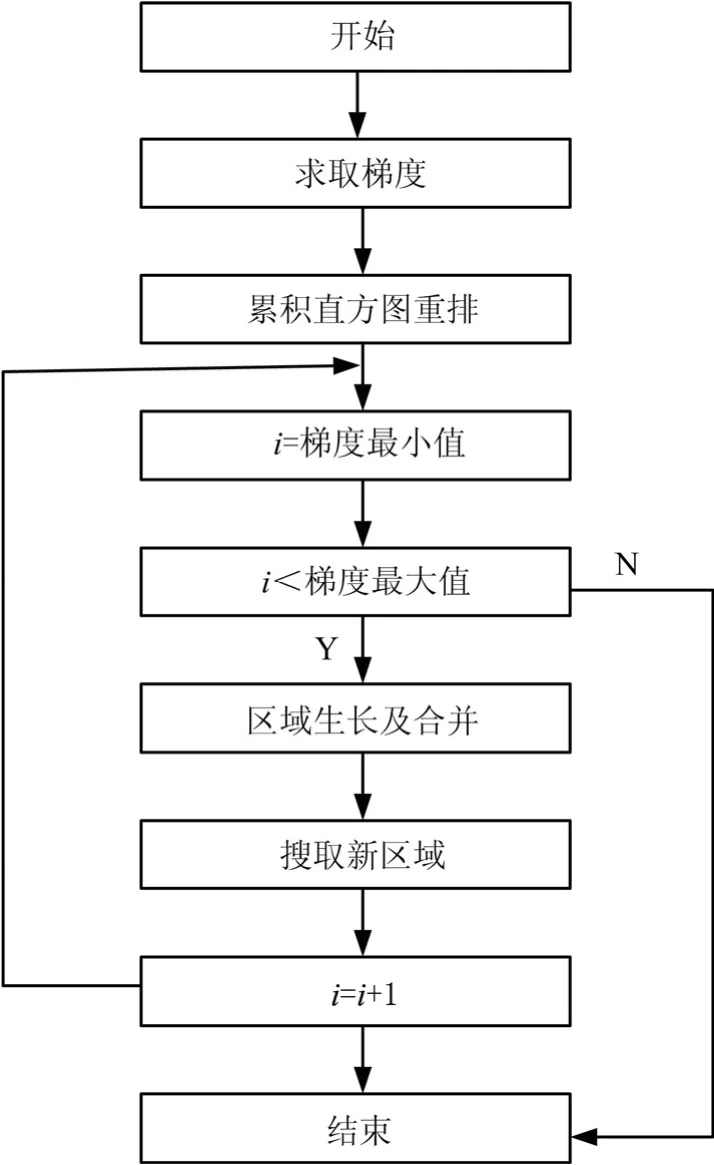
图3 改进分水岭算法流程示意Fig.3 Process of Improving the Watershed Algorithm

b)重排梯度图。
分水岭算法对像素处理是按照像素值从小到大的顺序进行的。因此,按照图像的像素值由小到大的顺序进行重排,生成原图像的累积直方图。由于在计算过程中需频繁地访问像素的邻域,为了加快运算的速度,在重排过程中设定存储每个像素的 8个邻域的像素信息,这样就能直接访问到像素的邻域信息。
c)从最小的梯度值开始,逐级处理梯度像素,一边分割一边合并,直到进行到梯度最大值,整幅图像就处理完毕。
为了加快处理进程,应用了先进先出队列结构。算法执行是按照梯度逐步上升处理的,例如处理到梯度级为h时,小于h的梯度都被处理完了。设处理完像素的集合为M,h+1的像素集合为N,M与N的关系有如下3种:a)M与N不相交,说明N为新的流域谷底;b)M与N相交且连通,则把N归到M对应谷底;c)M
由图3可知,改进分水岭算法流程步骤如下:
a)提取梯度图。
形态学梯度是指用图像一次膨胀的结果减去一次腐蚀的结果,算法应用求取形态学梯度的方法。形态学梯度图像g为与N相交但不连通,说明N属于不同流域,需计算与不同谷底的距离,再将其归入到相应的流域。具体步骤为:
1)像素入队:在整个程序的执行过程中,存在一个处理队列,用来将能处理的像素入队,并且在要处理时出队。例如处理到梯度级为h的时候,将梯度为h而且包括在邻域中已经处理完的那些点入队。一次入队结束后,再将队内的点出队进行处理。
2)从队列当中逐个取出像素点,设取出的点为p,计算p邻域中分水岭和流域的个数,分别用umNW和表示。
3)根据umN B和umNW来判断p输出。
如果um1N B=,则与p点相邻流域只有一个,将这个点的输出赋给p。
4)判断新谷底出现:与前面所述M与N的不相交的情况相对应,此时要对图像进行重新的扫描来判断是否有新的谷底出现。
2 实验验证
对某型弹体的模型进行CT检测,外壳为钢体,在药柱处人工预制了裂纹缺陷。应用传统的分水岭算法和本文的方法处理后,对结果进行比对。CT检测原图如图4所示,应用线性滤波对原图进行预处理,处理后的效果如图5所示。

图4 CT检测原图Fig.4 CT Detection Original Map
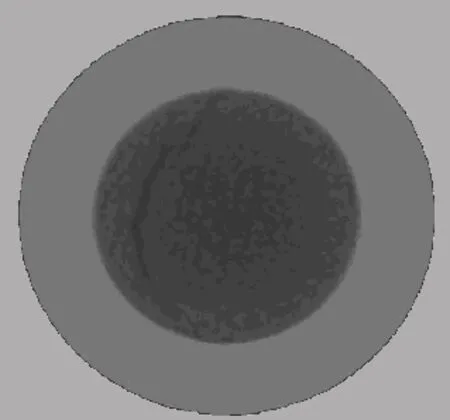
图5 预处理后效果Fig.5 Preconditioning Effect Diagram
传统分水岭算法处理后的图像以及本文方法处理后图像如图6所示。
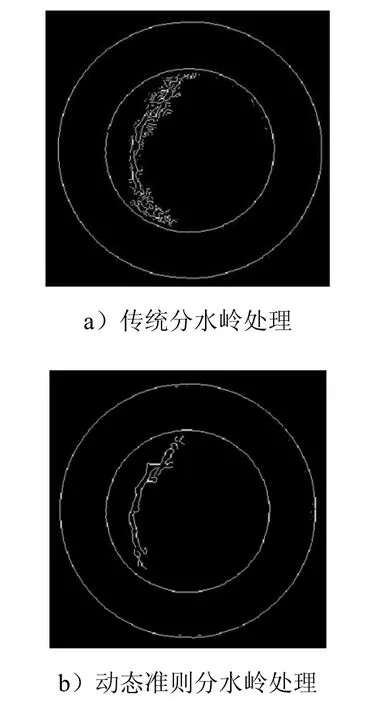
图6 分水岭算法处理结果Fig.6 Watershed Algorithm Processing Result Diagram
由图6可知,应用传统方法处理后的图像存在明显的过分割现象,而应用动态合并准则的分水岭方法的处理结果对过分割起到了明显的抑制,对比数据如表1所示。
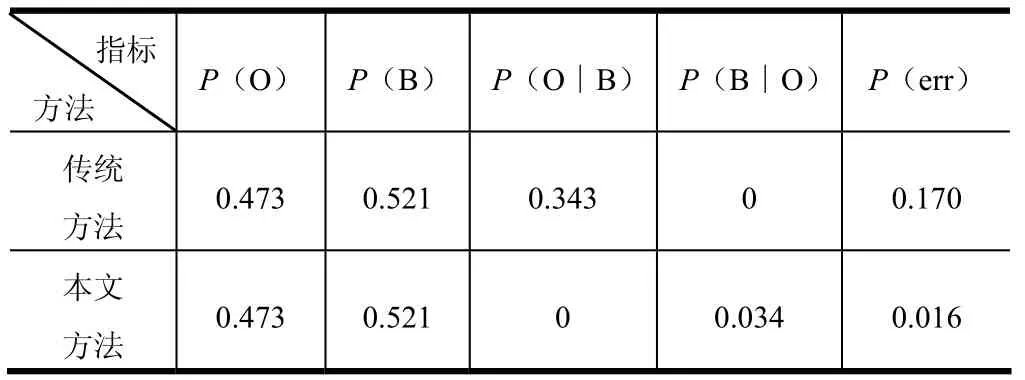
表1 计算错分概率相关数据Tab.1 Calculation of Error Probability Related Data
由表 1可知,本文方法的错分概率为传统分水岭方法的1/10。
3 结 论
在传统分水岭算法的基础之上,进行了基于动态合并准则分割方法的改进,通过实验验证该方法对过分割有了明显的抑制。基于动态合并准则的分水岭算法不必像区域生长分割算法一样需对图片有较多先验知识,也不必像边缘检测方法那样检测到边缘后还要进行边缘连接。目前实验只对裂纹缺陷 CT图像的处理,后期还会进行其他缺陷的大量实验,进一步完善算法研究。
