浅谈博物馆室内定位导航应用
2018-08-14海鸥
海鸥
(深圳博物馆,广东 深圳 518000)
博物馆室内面积大,内部结构设计复杂,观众容易迷路或者难以到达目标展区,因此迫切需要室内定位导航技术以提升观众的参观体验。光通信技术利用室内照明LED灯同时提供照明与定位功能[1],定位精度高、无电磁辐射、无需额外安装定位设备,建设成本低。本文提出一种基于可见光通信的博物馆室内定位导航,具有定位速度快、定位精度高的优势,可提供实时准确的定位导航服务,可有效提高博物馆观众导览体验、提升博物馆的文化传播功能。
1 博物馆室内定位导航的需求分析
一般说来,博物馆的室内展厅规划布局具有面积大的特点,目的是使展品有一个良好的展示空间且观众有一个舒适的观赏环境。博物馆建筑项目被喻为建筑工程项目的“圣杯”,因为每个博物馆建筑都是经过设计师精心设计所建,里面包含了各式各样的功能分区。
1.1 博物馆室内定位导航的必要性
对于入馆参观的观众来说,宽大的展厅和复杂的分区设计很容易导致迷路或者重复已参观过的路线,消耗了额外的时间和体力,降低了观赏体验,也体现不出展厅空间设计与内容设计的对应性。因此,博物馆里迫切需要为观众提供准确的室内定位和导航指引服务。通过此服务,观众可以快速定位自己当前的室内位置,并找到自己想要去的展区。
1.2 博物馆室内定位导航现状
当前使用最为广泛的定位导航技术(GPS)因为卫星信号被博物馆建筑遮挡,无法应用于博物馆室内定位导航中。而其他的一些室内定位技术如蓝牙、ZigBee、射频识别标签(RFID)、WiFi等则有如下缺点:一方面,这些技术的定位精度不高,均在米级,如WiFi的精确度为3米;另一方面,这些基于射频技术的定位方法都会产生电磁干扰,可能影响博物馆各类监测设备的正常工作、阻塞通信设备的工作频段等;此外,这些定位方法都需要额外安装定位设备,可能破坏博物馆的艺术设计效果和整体风格,如二维码定位需要在墙上张贴二维码标签图。
2 可见光室内定位技术
可见光室内定位技术是一种利用LED照明灯作为基站发送可见光信号帮助用户定位当前位置的技术[2]。通常LED被用作可见光信号发射装置发送携带LED的标识符、几何位置信息或任何对定位有帮助信息的定位信号,光电二极管或图像传感器被用来接收这些信号,并通过解码、解调等信号处理后恢复出原始信息,再由相应的定位算法计算得到具体位置坐标。目前,可见光室内定位常用的定位方法可以分为四大类:近似感知法,指纹识别法,三角测量法,视觉分析法。近似感知技术利用来自单个LED灯的信号来确定当前位置,每个LED灯都分配了一个唯一的标识符,当用户从LED灯的灯光信号里面获得该标识符时,通过查询与该标识符关联的LED灯安装位置即可获知自身所在的区域坐标。近似感知法定位速度快,所给出的当前位置即LED灯光覆盖的范围。指纹识别法即通常所说的场景分析,是通过匹配在线测量数据和预先测量的位置相关数据来估计相对位置的定位技术。由于博物馆中观众的走动可能会产生不确定的遮挡,所以在不同位置测量数据的指纹会有所不同,对精度有一定的影响。三角测量法使用三角形的几何性质来进行绝对定位,可分为测距法和测角法。测距法利用移动设备到多个LED灯的测量距离来估计移动设备的位置;而测角法需测量接收端相对于多个参考光源之间的接收角度,再通过方向线的交点定位目标。视觉分析算法的基础是图像处理,利用真实世界中物体的三维位置和它们在图像传感器平面上的二维位置之间的几何关系来计算物体的位置坐标。
3 基于可见光通信的博物馆室内定位导航系统
本文提出了一种基于可见光通信技术的博物馆室内定位导航系统,既利用照明LED灯发送定位信息,使用户可以获得自己当前的位置,并进一步支持观众到期望目标展区的路线规划和实时导航。如图1所示,系统主要由两部分组成:可见光定位LED灯具和可见光定位导航终端。
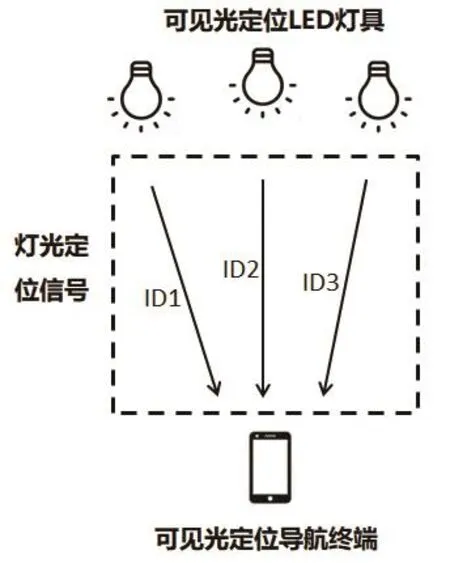
图1 可见光通信室内定位导航系统结构图
3.1 可见光定位LED灯具
可见光定位LED灯具的主要功能是提供照明并发送可见光定位信号。每具可见光定位LED灯具通过内嵌的微控制器对预分配的唯一标识符进行线路编码得到适合可见光传输线路和照明功能的调制码字,再由灯具驱动器以开关键控调制方式驱动LED灯具“开/关”,发送对应的可见光信号,所发送的的标识符唯一地与该灯具安装的空间坐标(x,y)相关联。
3.2 可见光定位导航终端
可见光定位导航终端的主要功能是以成像的方式接收可见光定位LED灯具所发送的可见光定位信号并完成定位计算,进而支持路线规划和实时导航。可见光定位导航终端采用CMOS图像传感器对可见光定位LED灯具所发送的“开/关”交替的可见光信号进行成像,并基于快门效应将时间上交替的亮灭灯光信号转换为图像上的明暗相间的条纹图像;通过对捕获的图像进行图像预处理得到编码信息后,译码得到该灯具的唯一标识符并查询“坐标”映射,即可获得该标识符所对应的空间坐标。在此基础上,如果观众指定想到达的目标位置,终端会采用路径规划算法设计出行进路线。在观众行进过程中,终端继续不断地捕捉沿途的可见光定位LED灯具并实时更新当前位置。
3.3 图像预处理
通常,CMOS传感器所获取的原始图像会因为受到某种干扰而含有噪声,恶化了图像质量,甚至淹没图像特征,严重影响后续图像处理和分析。因此,为了获取准确的数据,需要采取一定的措施对图像进行预处理。常用的方法有:灰度化、滤波去噪和二值化。考虑到博物馆中只有室内LED照明灯光,无其他光源干扰,本系统主要采用图像二值化方法。图像二值化的意思就是将原图像转化为只有黑和白两种色度值的图像。二值化后的图像具有存储空间小、处理速度快等特点,且支持对图像直接的布尔运算,可以比较容易地获取目标区域的位置、大小、边界等几何特征,后续图像处理与分析可以更为简便。
3.4 路线导航
可见光定位导航终端会基于用户的当前位置和目标位置规划路线并在用户行进时及时给出指示,引导用户经由最合理的路线到达目的地。路线导航算法通常使用基于图论的最短路径算法,常用的最短路径算法为Dijkstra算法。该算法于1959年提出,用于解决非负权有向图的单源最短路径问题,是一种基于迭代的图搜索算法。其主要思想是首先从源点求出长度最短的一条路径,然后通过对路径长度迭代得到从源点到其他各目标节点的最短路径,可在有向图上找到从源节点到所有其他节点的最短路径,在此过程中还将生成最短路径树。
4 博物馆室内定位导航的衍生导览服务
现在各博物馆智能导览主要还是需要观众用手持设备扫描二维码或输入展品数字来进行信息的获取。由于博物馆室内导航系统是集成在智慧博物馆系统之下,通过该系统中数据交换和智能推送功能,可在观众在博物馆内导航行进的途中将沿途重要展品、场景的各类信息推送给观众。观众可以选择自己感兴趣的展品,室内定位导航系统会按照观众的选择实时更改行进中的导航路径,使得观众能更快捷地到达此展品位置[3]。这样不仅可以让观众避开人群集中的博物馆常规设置参观路径,也能让观众每次来博物馆都有不同的参观体验,更能让观众按照自己的兴趣爱好在展厅内行走,按照自己的节奏来进行参观。博物馆也能给观众提供轻松、自由的参观服务,实现“以人为本”的服务宗旨。
本文提出了一种基于可见光通信的博物馆室内定位导航系统,利用传统照明LED灯广播发送位置信息从而实现用户室内定位,具有定位速度快、定位精度高、无电磁干扰、建设成本低的优势,可提供实时准确的定位导航服务。通过其衍生的导览服务可以进行参观沿途的展品信息推送功能,可有效提高室内博物馆观众导览体验、提升博物馆的文化传播功能。■