多功能工业机器人实训装置的设计
2018-08-11叶晖
叶 晖
(ABB(中国)有限公司广州分公司,广州,510623)
0 前言
自20世纪60年代初第一台工业机器人问世到现在,短短50多年,工业机器人技术和周边配套应用技术得到了迅速发展,工业机器人系统在自动化、智能化、定制化生产制造领域得到广泛应用。随着用工成本提升、制造业转型升级的迫切需求,社会对工业机器人应用与维护人才的需求也不断增多,使得企业迫切需要功能齐全、用于工业机器人技术学习的装置,以满足不同层次人才培养的设备需求。
1 实训装置的设计要求
实训装置以使用者学习工业机器人技术为主要目的,并兼顾与工业机器人工作站配套的PLC、触摸屏、传感器和气动技术的学习。工业机器人典型基础应用包括装配、码垛、压铸、检测、轨迹等,要求以项目化和模块化的形式设计实训项目内容,从而让使用者在实训室里完成各种典型工业机器人行业应用的学习。对此,我们将实训装置设计为一个开放式的工业机器人实训平台,以适应不同行业实际生产应用变化的需求。
2 实训平台台架
开放式的工业机器人实训平台台架,是各种功能模块安装的基础,各类典型工业机器人应用模块均可在平台台架上进行组合搭建,以适应不同实训内容的要求。
实训平台台架主要由铝型材、贴面板、加工件等搭建而成,如图1所示,其四边采用圆弧型材搭建,外形美观。单个工作台外形尺寸为:1600mm×1260mm×780mm。台架分为上下两层,上层用于安装工业机器人和操作对象,下层用于安装电气控制柜和电器安装板,或其他辅助装置。工作台三面都是双开门,背面配备散热风机,利于工业机器人控制柜等设备的安装和散热,底部装有可调节高度的脚轮,方便设备移动和放置。

3 工业机器人的选型与配套设计
3.1 选型
机器人本体工作站主要由机器人安装底座、工业机器人、工具夹具等组成。其中,工具夹具主要由气缸、气动手指、导电电极、真空气路等组成。工具夹具固定在工业机器人第六轴法兰盘上,可以直接夹取3种工具——真空吸盘工具、画笔工具、TCP校准工具进行作业,也可以直接夹取方形工件进行搬运入库工作。工具夹具在抓取抛光工装和真空吸盘工装时,电路和气路能够自动对接,无需人工辅助。
为了满足紧凑、小巧、功能完善和性价比高的设计要求,工业机器人本体选用ABB的小型串联6轴机器人,型号为IRB120-3/0.58,如图2所示,其主要技术参数如表1所示。
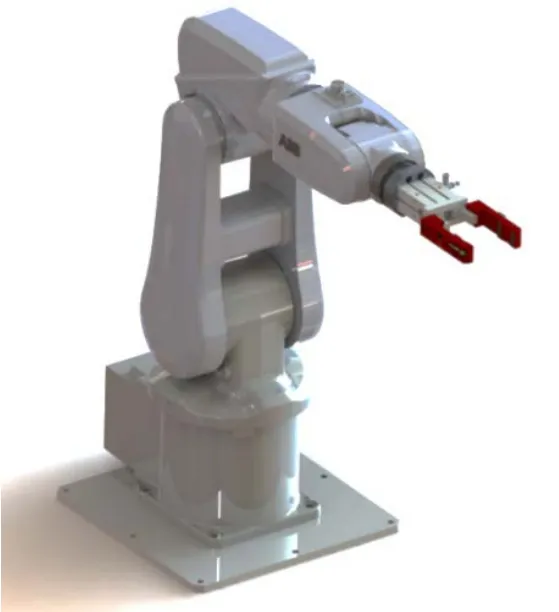
图2 ABB工业机器人IRB120
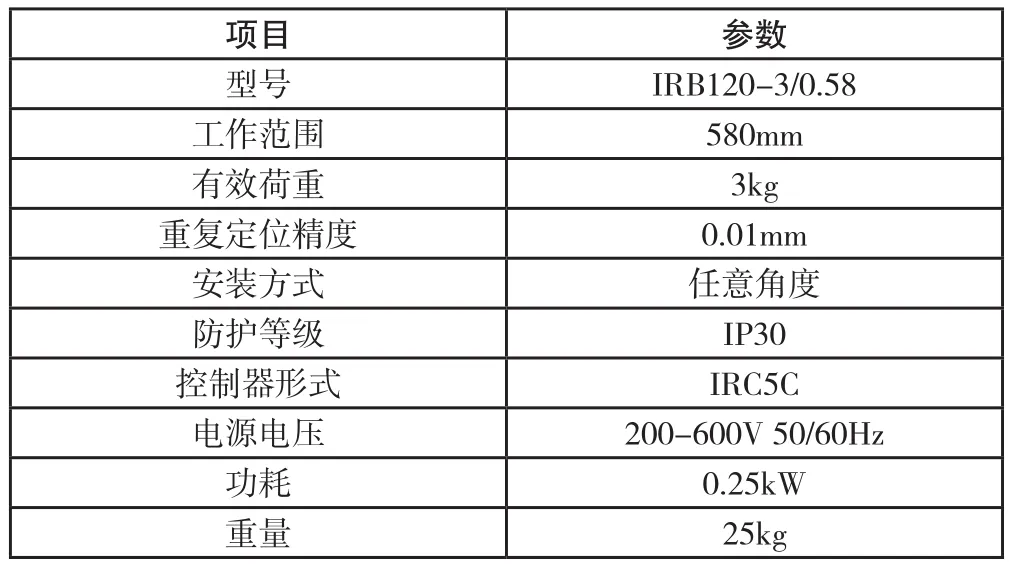
表1 IRB120主要技术参数
根据实际生产需要,工业机器人必须具备以下功能,以满足实训的需求:在机器人使用寿命内,使用机器人离线软件进行程序、I/O和机器人3D动态动作的监控;远程机器人系统具备备份与恢复功能,自动工具重量与载荷检测设定功能,提供基于VB的二次开发功能,机器人全寿命保养自动维护检测系统功能,机器人运动轨迹实时微调功能;自带I/O自定义可编程按钮功能;具备3D实时舒适摇杆手动操作系统;电池环保、电量节省;机器人系统功能可终身升级(高级用户);支持RAPID编程语言规范,并可直接解释执行;机器人控制系统软件必须基于WINCE平台,以便机器人二次开发;机器人控制系统原配固态存储器容量不得低于1G,并支持USB扩展为副存储器。
3.2 配套设计
为便于存放工具,我们为实训装置设计了工具存放的支架。支架外形尺寸为:500mm×120mm×250mm,由铝型材和加工件等搭建而成,并且底部装有方便调节位置的安装底板。工具支架采用铝件阳极氧化喷砂,安装底板采用Q235A件喷塑。工具支架可以放置3个子工具,以配合机器人工具夹具接口完成各种实训工具切换的需要,如图3所示。

图3 工具存放支架
为满足实际需要,我们设计了真空吸盘工具、画笔工具和TCP校准工具3种子工具用于实训,如图4所示。

图4 实训子工具
4 工业机器人典型应用模块设计
4.1 供料传输模块
为了模拟训练工业机器人搬运码垛的实际工作情况,我们设计开发了一个供料传输模块,如图5所示。该模块由传送带、供料机构等组成。在工作过程中,工件首先在料仓中由气动装置推到传送带上,完成工件的供料传输,然后工件再经传送带输送到位后,由机器人抓取工件送入装配单元。传送带由直流电机驱动,设有张紧机构,方便调节。
4.2 装配单元模块
为了模拟训练工业机器人物料组合装配的实际工作情况,我们设计开发了一个装配单元模块,如图6所示。该模块由型材搭建支架、底座、工作底板、挡边立柱等组成,其底座采用Q235A喷塑,工作底板采用铝件阳极氧化喷砂,挡边立柱采用钢镀铬。挡边立柱形成4个装配区,供机器人抓取工件装配;底座上有调节孔,方便位置调节。
4.3 码垛单元模块
为了模拟训练工业机器人物料码垛的实际工作情况,我们设计开发了码垛单元模块。该模块由型材搭建支架、底座、工作底板等组成,其底座采用Q235A喷塑,工作底板采用铝件阳极氧化喷砂。工作底板上装有防护垫;底座上有调节孔,方便位置调节,如图7所示。机器人抓取工件在工作底板上进行码垛。
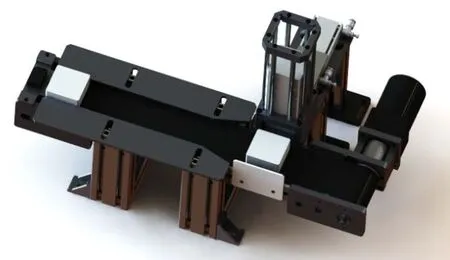
图5 供料传输模块
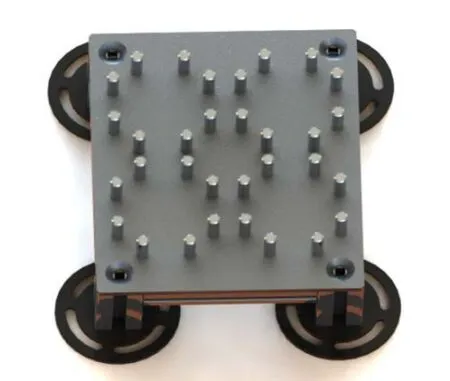
图6 装配单元模块
4.4 压铸机单元模块
为了模拟训练工业机器人压铸机上下料的实际工作情况,我们设计开发了压铸机单元模块。该模块由型材搭建支架、压铸机构、进料机构、推料机构等组成,其铝质部件采用阳极氧化喷砂处理,钢质部件则采用喷塑处理,机构外围安装有钣金罩壳和安全罩,既美观又安全,如图8所示。
在工作过程中,压铸机构在接收到PLC控制指令信号后,向电磁阀发出电信号,使气缸驱动动模在导杆上进行直线合模运动。在合模完毕后,工件从存储单元中由气缸推入压铸机构的模腔内,然后由PLC向电磁阀发出信号,使气缸驱动动模在导杆上进行直线开模运动,到位后机器人将工件从压铸机构取出,从而实现工件的模拟压铸过程。

图7 码垛单元模块

图8 压铸机单元模块
4.5 检测单元模块
压铸完成之后的工件由工业机器人夹取到检测机构上进行检测,根据检测结果放置在指定位置。检测单元模块如图9所示。

图9 检测单元模块
4.6 轨迹模拟单元模块
为了模拟训练工业机器人轨迹应用的实际情况,我们设计开发了轨迹模拟单元模块。该模块由型材、底座、轨迹模拟板、画图板、纸张、磁钢等组成。其底座采用Q235A喷塑,轨迹模拟板采用铝件阳极氧化喷砂,画图板采用茶色有机玻璃,板内嵌磁钢。机器人可以抓取工装进行轨迹模拟训练,也可以将背面磁钢固定的画图板放置到正面进行画图训练,如图10所示。
5 工业机器人整体布局设计
在完成工业机器人各模块功能及结构设计后,我们将所有模块在平台上按照机器人可到达范围及模块功能的实现需要进行整体布局设计,如图11所示。
6 结论
ABB公司设计完成的多功能机器人实训装置,为培养实用型工业机器人安装、调试和维护的自动化技术人员提供了高效、安全实训学习平台。
生产现场所使用的工业机器人均为单一工作站,而工业机器人人才培养的是复合型技能人才,要求专业技能高度综合性,需要掌握的技术和技能要涵盖工业机器人不同行业的应用,如:码垛、搬运、上下料、压铸、传输线跟踪、抓取等,故培训装置要能完成多种工业、行业应用的专业技能培训,以减少用户的设备投入成本,创造高经济价值。
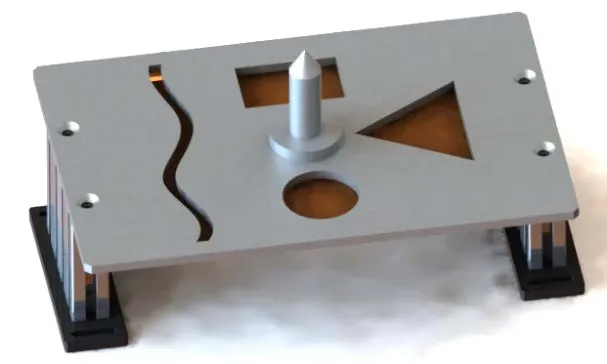
图10 轨迹模拟单元模块
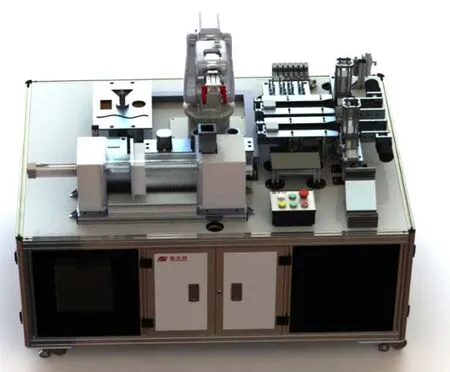
图11 多功能工业机器人实训装置整体布局
