某轻型飞机方向舵操纵系统结构分析及优化
2018-08-10陈果
陈 果
(重庆恩斯特龙通用航空技术研究院有限公司, 重庆 401135)
近年来,随着国家政策的引导和市场对通用航空业务的迫切需求,通用航空器的研发得到了飞速发展。由于技术要求和成本相对较低,单发轻型固定翼飞机倍受青睐。操纵系统作为控制飞机飞行轨迹和姿态的核心部件,其可靠性对安全飞行尤为重要。飞机的操纵系统经历了由简单初级到复杂完善的发展过程,先后出现了机械式操纵,可逆、不可逆助力操纵和电传操纵,并在电传操纵基础上发展了主动控制技术。目前,轻型飞机大多采用机械式操纵系统。在不同的机动飞行过程中,复杂的气动载荷作用于飞机的舵面(方向舵、升降舵、襟翼及副翼等)以及操纵系统的零部件,为此,国内外学者对操纵系统的载荷和强度进行了大量的研究。郭炳斌等[1]运用传统方法和有限元法分别计算了操纵系统摇臂、拉杆和支座的载荷,并表明两种方法均满足工程实用需求,但传统计算方法较为复杂。罗金亮[2]对襟翼拉杆的稳定性和拉杆耳环螺栓的强度进行了校核,指出由制造工艺引起的拉杆压力方向和耳环螺栓轴线之间轻微的不同轴是导致拉杆失效的重要因素。焦振双等[3]在考虑操纵系统强度刚度的基础上开发了一套可用于硬式机械操纵系统纵向操纵机构传动比计算的软件。F.Z.Zheng等[4-5]对飞机的襟翼操作系统进行了静强度校核及可靠性分性。沈景丽[6]分析了某型水上轰炸机地面阵风载荷下的飞机操纵系统受力,得出八级阵风是导致该型飞机方向舵操纵系统某拉杆失稳弯曲的主要原因。黄国兴等[7]以CATIA软件为基础建立了纵向操纵系统的参数化零件库,并利用Adams软件对操纵系统进行了系统仿真研究。上述学者的研究对象主要是操纵系统拉杆,而在操纵系统支座的静强度及其结构优化方面的研究相对较少。基于此,本文对某款轻型固定翼飞机方向舵操纵系统进行建模,校核拉杆的稳定性和支座的静强度,并对支座进行结构优化。
1 方向舵操纵系统结构及其原理
飞机的操纵系统主要作用是传递操纵指令、驱动舵面和其他机构以控制飞机飞行姿态。目前,现代民航客机主要采用质量轻、体积小的电传操纵系统[8],如空客A320、C919等。而轻型通航飞机(主要指轻型固定翼飞机或轻型直升机)主要采用结构简单、成本低的机械式操纵系统,如cessna172R、PA44-180及N5等。机械式操纵系统主要分为软式操纵系统和硬式操纵系统。本文研究对象为某轻型固定翼单发四座活塞式飞机,其方向舵操纵系统采用了硬式机械操纵系统,硬式操纵系统由拉杆和摇臂组成,刚度大,磨损小,具有较佳的操纵灵敏度。本文研究的方向舵操纵系统具体结构如图1所示,主要包括拉杆、摇臂、支座及轴承等零部件。操纵脚蹬的转角与方向舵舵面的偏转角度之间基本上为线性变化,其相对关系如图2所示。主副驾驶同侧脚蹬通过脚蹬枢轴相连,实现左右侧操纵的联动,当主驾驶(右侧)踩右脚脚蹬时,拉杆1向后侧运动(受压),并带动摆臂13顺时针转动(俯视),进而向前拉动拉杆4至拉杆9及摇臂12,最终使得方向舵向右侧偏转,实现飞机向右偏航。踩左脚脚蹬时,各杆件及摇臂向相反方向运动,最终带动方向舵舵面向左侧偏转,实现飞机向左偏航。

1~9.杆;10.V型摇臂;11.方向舵;12.摇臂;13.摆臂

图2 方向舵舵面转角随脚蹬转角的变化关系
2 方向舵操纵系统数值建模
文献[1]指出,在计算操纵系统受力时,有限元法较传统方法更为方便。为此,本文基于Patran /Hypermesh建立某款固定翼飞机方向舵操纵系统有限元分析模型。方向舵操纵系统主要由杆系及摇臂组成。杆系为细长杆,建模时将其简化为梁单元,摇臂厚度方向尺寸小于其余方向尺寸,符合平面应力问题,故将其简化为壳单元。摇臂、摆臂及V型摇臂与其安装座通过轴承铰接。故上述零部件的约束为:将零件上轴承外圈孔壁所有节点的全部自由度通过RBE2单元耦合到孔壁中心节点后,约束孔壁中心节点除绕轴承轴线转动以外的所有自由度。摇臂、摆臂及V型摇臂与拉杆之间的约束为:将零件上与拉杆铰接的圆柱孔壁所有节点的全部自由度通过RBE2耦合到孔壁中心节点上,再用梁单元将相邻摇臂(摆臂或V型摇臂)之间的孔壁中心节点连接,在梁单元属性中将两端节点相应自由度进行释放,释放自由度时应注意某些拉杆与摇臂(摆臂或V型摇臂)的连接是平面铰接,应释放1个方向的转动自由度,而某些球面铰接应释放3个方向的转动自由度。对于载荷的施加,本文采用如下的方式:当模拟方向舵右满舵时,调整各零部件位置到右满舵位置,在方向舵舵面转轴上施加满舵时的铰链力矩载荷100 N·m (飞机总体技术方案报告中的铰链力矩计算值为80 N·m,根据适航法规要求取1.25安全系数),同时将右脚脚蹬转轴全约束,左脚脚蹬约束除绕其转轴转动自由度外的其余自由度。最终的有限元模型如图3所示(图中黄色线表示用于模拟拉杆的梁单元,红色线表示建立的RBE2单元,壳单元以其完整厚度显示)。模型总计4 532个单元、5 443个节点。
拉杆和摇臂材料均考虑为铝合金,弹性模量取71 GPa,泊松比取0.3,密度为2.8×10-3kg/cm3。
3 方向舵操纵系统分析
将得到的有限元模型提交到Nastran 2013中进行计算,再将计算结果导入Patran 2013中进行结果后处理分析。
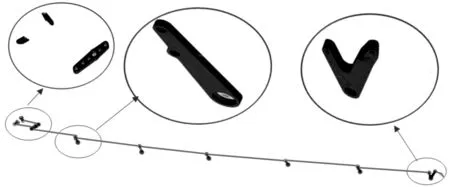
图3 操纵系统有限元模型
3.1 杆系稳定性分析
在后处理中提取各个拉杆的轴向力,并校核其欧拉稳定性[9],结果如表1所示(由于杆系均为两端铰接,取杆端约束系数均为1)。从表1可以看出:方向舵操纵系统拉杆8的安全裕度最小,约为0.4,主要是由于该杆杆长较长,且杆力较大。计算结果表明:所有拉杆的欧拉稳定性的安全裕度M.S.>0,杆系在设计操纵力和气动力范围内不会发生欧拉失稳。另外,从表1还可以看出:所有拉杆的杆应力均在40 MPa以下,均远小于拉杆材料的比例极限(约为280 MPa),这表明拉杆材料在设计工况下不会发生屈服,且上述稳定性计算采用欧拉失稳公式而不采用欧拉-恩格斯失稳公式是正确的。
3.2 摇臂静强度分析
不同形状的摇臂将操纵系统中的杆系连接在一起,并传递运动和力。摇臂的静强度在一定程度上决定了操纵系统的可靠性。通过上述有限元模型的计算可以得到方向舵操纵系统各摇臂的应力和位移,如图4~6所示。从图4、5可以看出:V形摇臂的最大应力约为250 MPa,位于V形摇臂的V形开口根部,其余地方为100~150 MPa;V形摇臂的最大平移位移约为4.59 mm,位于V形摇臂与9号拉杆连接的支臂端部;对于操纵系统其余部件而言,除脚蹬支架壁的应力达到260 MPa外(此处为有限元模型的约束点),其余摇臂的应力基本处于120 MPa以下。综上所述,设计工况下操纵系统的应力均在材料的屈服极限应力280 MPa以下,强度能满足使用要求,但是V形摇臂的平移位移较大,刚度较小,需要进行结构优化设计。
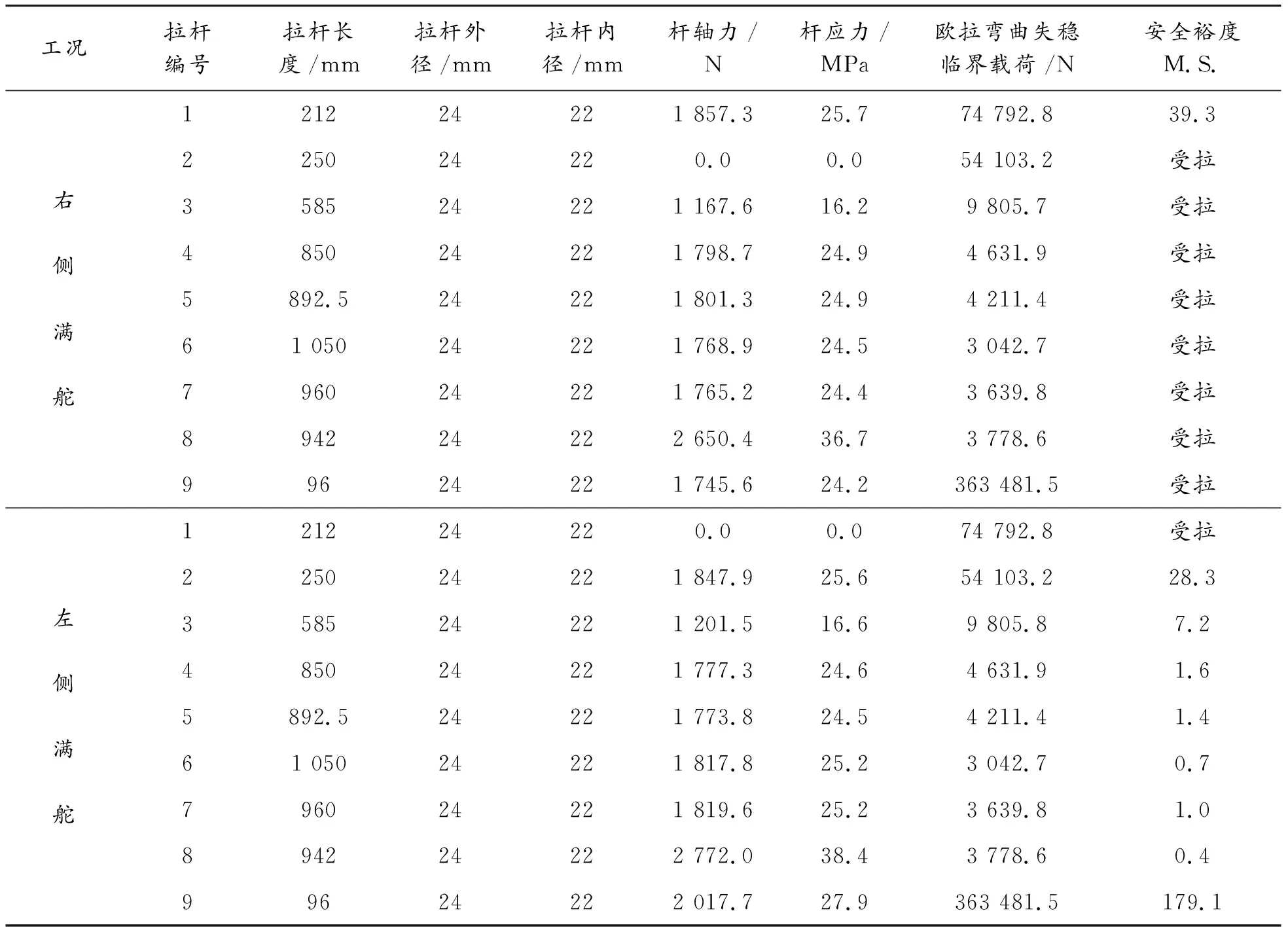
表1 方向舵操纵系统拉杆稳定性分析结果

图4 V形摇臂应力和位移云图
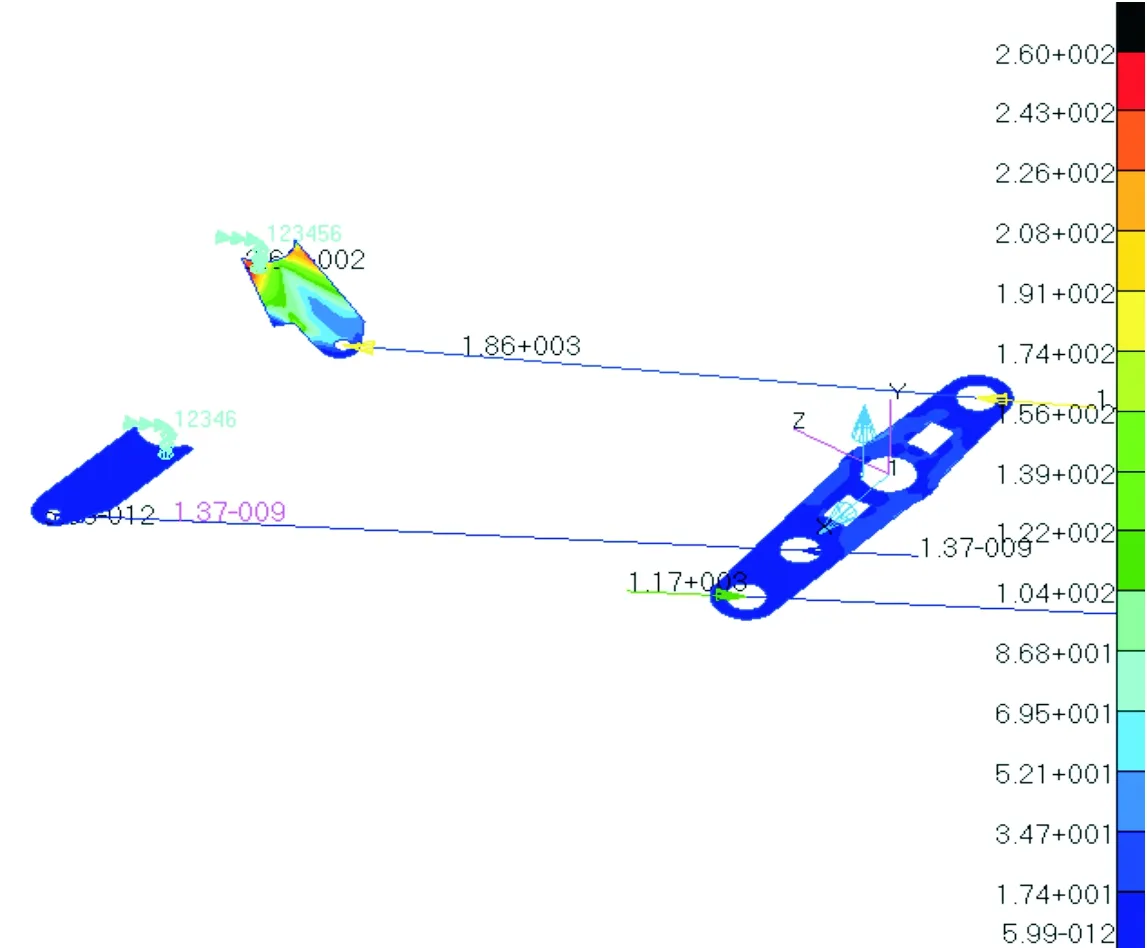
图5 摇臂及脚蹬支架Von-Mises应力云图

图6 摇臂Von-Mises应力云图
4 方向舵操纵系统V形摇臂结构优化
由于V形摇臂连接的两个拉杆与摇臂的安装平面不在同一个平面内,摇臂的受力为空间力系,因此常规的优化方法较难完成其结构优化。本研究采用拓扑优化技术来完成该摇臂的刚度最优设计。均匀化法和变密度法是目前最为常见的两种连续体结构拓扑优化方法,但后者因设计变量相对较少,求解效率高也更为工程应用所接受。本文变密度法采用的插值模型为固体各向同性惩罚微结构模型,即SIMP模型。
在Patran中建立V形摇臂的优化模型,如图7所示。该摇臂连接两根拉杆,并安装在支座上,为得到最优的摇臂形状,最初的优化模型为包含3个安装孔(2个拉杆安装孔、1个支座安装孔)的空间板,提取其中性面,利用壳单元模拟其结构。该优化模型的边界条件为:将本文获得的杆系的轴向力施加到该优化模型上,两模型应保持力的各要素一致;对于摇臂的约束,将摇臂上与安装支座连接的孔壁全约束。由于V形摇臂受空间作用力,因此将本研究得到的载荷和约束用于该优化模型后,但由于数值误差的存在,释放摇臂绕安装轴承轴线转动自由度后的优化模型容易产生刚体位移,故将该优化模型的约束改为全约束,但必须保证绕安装轴承轴线转动约束力尽可能接近0,优化前模型如图7所示。该优化模型摇臂绕安装轴承轴线方向的转动约束力约为3 N,约为杆力的0.15%,满足工程应用。

图7 V形摇臂优化前模型
将结构柔顺度最小化(即结构刚度最大化)作为优化的目标函数,以结构体积比(本文取0.4,即将摇臂质量减轻10%)约束及结构应力小于材料屈服极限作为优化的约束函数,利用Patran/Nastran的变密度拓扑优化计算后,得到该结构的单元密度分布,如图8所示。图8中红色部分表示单元密度比(优化后单元密度/优化前单元密度)为1,是材料利用率最高的部分。而蓝色部分表示单元密度比为0,是材料利用率最低的部分。为此,从“最优化设计”的结果来看,该摇臂应设计为“D”形结构(即图8中红色区域),而不是现有的“V”形结构。

图8 V形摇臂优化后模型
5 结论
1) 该款飞机方向舵操纵系统的静强度满足设计工况的要求,但V形摇臂的刚度较低。
2) 该款飞机方向舵操纵系统杆系的稳定性满足设计工况的要求,在设计工况下操纵系统杆系不会发生欧拉失稳。
3) 基于变密度法的拓扑优化表明:操纵系统中V形摇臂应设计为“D”形结构,可以获得更大结构效率,并在质量减轻约10%的情况下获得最优的结构刚度。
4) 本文的分析方法为飞机的操纵系统设计和校核奠定了基础,为操纵系统最优的结构设计提供了依据。