基于UG对卧式杠杆木薯拔起装置的有限元分析
2018-08-10卢煜海叶自旺徐佳晨
卢煜海,叶自旺,成 铭,王 勇,徐佳晨
(广西大学 机械工程学院,南宁 530004)
0 引言
木薯是一种用作饲料和提取淀粉的原材料,提取产物木薯淀粉广泛应用于食品工业及非食品工业,需求极大。但是,目前木薯的拔起工作主要依靠手工,且木薯主要种植在山地,土地紧实、不易拔起,单纯依靠手工拔起显然劳动强度大,还降低了采收效率,难以满足日益增长的木薯需求。
为此,设计了一种卧式杠杆木薯拔起装置,旨在解决木薯拔起过程中纯手工拔起劳动强度大等的问题,并可应对在实际拔起过程中木薯杆的夹持及其方向问题,实现了木薯夹持的自锁功能及拔起的多自由度。同时,为达到设计目标,对设计方案进行运动有限元分析,并对该装置进行实验,获得实验数据,以此来优化该装置的结构及零部件的尺寸,保证卧式杠杆木薯拔起装置的拔起力度和采收率。
1 结构设计及工作原理分析
1.1 结构设计
卧式杠杆木薯拔起装置主要由三大部分组成,分别为双齿轮驱动夹持木薯拔起机构、蜗轮蜗杆自锁木薯拔起机构及多自由度木薯拔起机构。其中,双齿轮驱动夹持木薯拔起机构能够利用外啮合齿轮转向相反的原理实现装置的夹持功能;蜗轮蜗杆自锁木薯拔起机构能够将作用在把手上的力通过蜗轮蜗杆带动双齿轮实现夹持,同时还能够利用其自身具有的自锁功能,使得夹持机构能够紧紧地夹持住木薯杆;多自由度木薯拔起机构则处于装置的底部,用于实现在实际运转中需要在水平和垂直方向上的调整。运用三维造型软件UG对其进行三维造型,具体结构如图1所示。
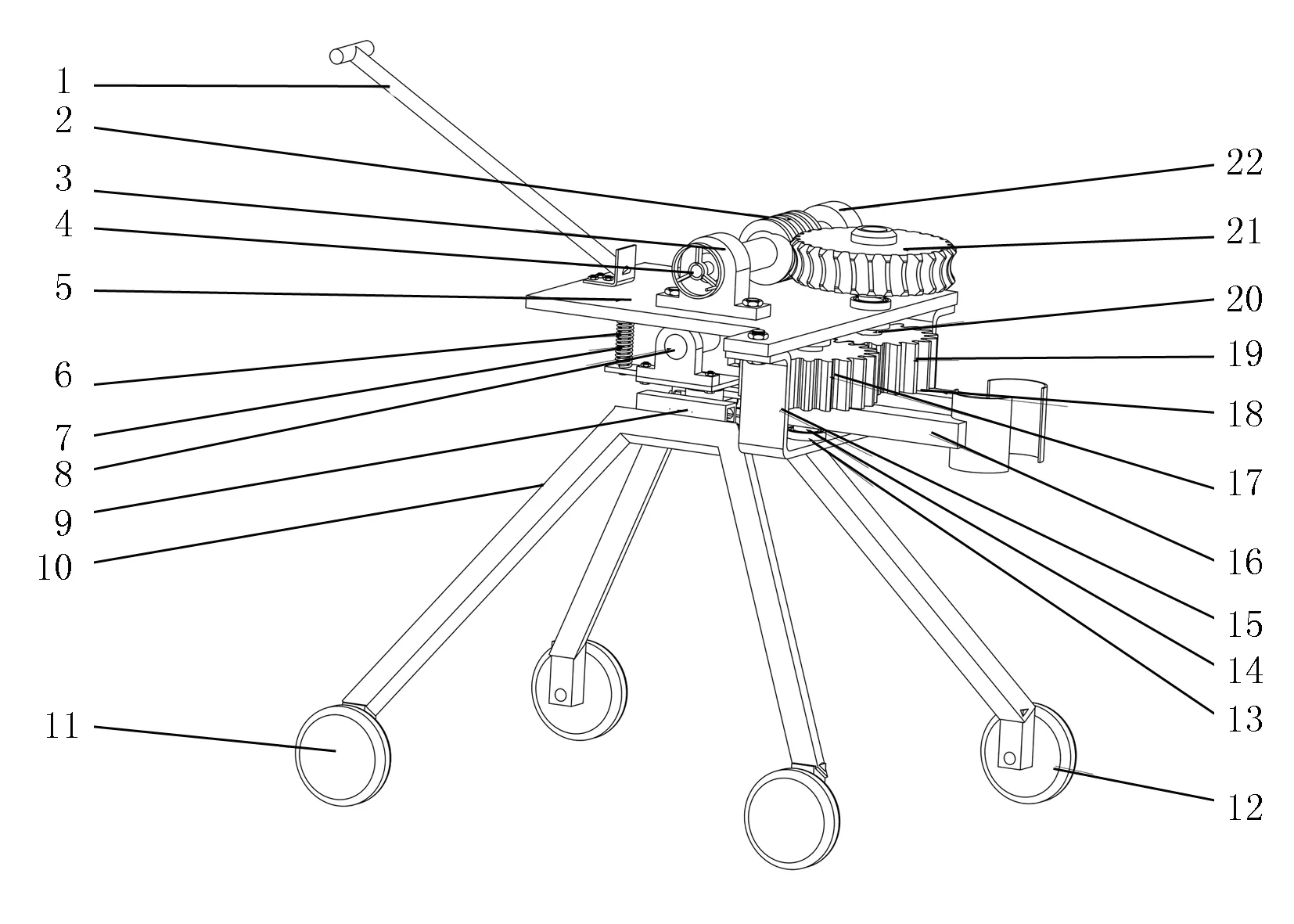
1.把手 2.蜗杆 3.右轴承座 4.转动手轮 5.支撑板 6.弹簧 7.弹簧连接杆 8.转动轴 9.导槽 10.支架 11.后轮 12.前轮 13.轴承 14.从动转动轴 15.齿轮固定板 16.右夹持手柄 17.从动齿 18.左夹持手柄 19.主动齿 20.主动齿转动轴 21.蜗轮 22.左轴承座
1.2 关键部分设计
1.2.1 双齿轮的结构设计
在进行双齿轮驱动夹持木薯拔起机构的设计时,由于需要保持两夹持手柄的转动角度相同,因此其传动比应该要满足以下要求,即
式中Z1—主动齿的齿数;
Z2—从动齿的齿数;
i12—主动齿对从动齿的传动比。
经过严格的设计计算后,最终确定了该双齿轮驱动夹持木薯拔起机构的主要参数如表1所示。
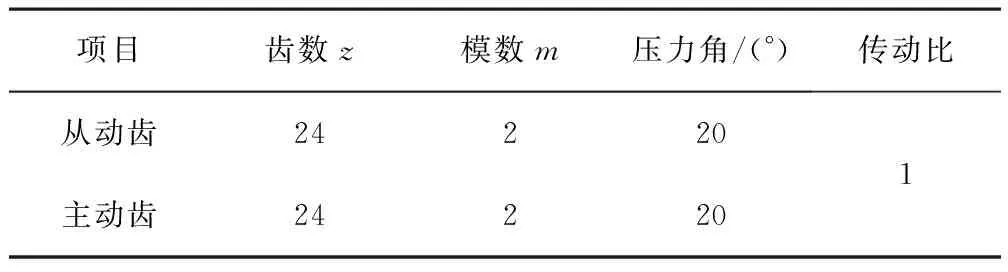
表1 双齿轮的主要参数Table 1 The main parameters of double gear
1.2.2 蜗轮蜗杆的结构设计
考虑到蜗轮蜗杆在实际工作中传动平稳性及蜗轮滚刀切制蜗轮时产生根切与干涉的问题,将蜗轮蜗杆设计成如表2所示的参数。
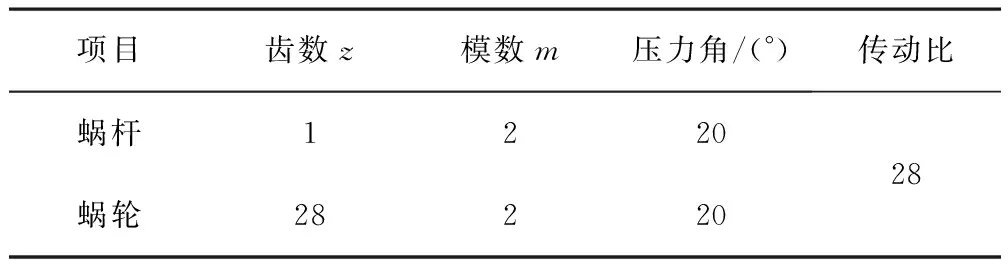
表2 蜗轮蜗杆的主要参数Table 2 The main parameters of worm gear and worm
其中,传动比的计算为
式中Z3—蜗杆的头数;
Z4—蜗轮的齿数;
i34—蜗杆对蜗轮的传动比。
1.2.3 关键部分的传动比计算
在上面对双齿轮驱动夹持木薯拔起机构及蜗轮蜗杆的设计参数中,得到了双齿轮、蜗轮及蜗杆的齿数(头数)的具体数据,由此可得到运动的输入端与输出端的转速比。由于蜗轮与从动齿连接在同一根转动轴上,则其公式为
式中Z3—蜗杆的头数;
Z4—蜗轮的齿数;
i34蜗杆对蜗轮的传动比;
i31—蜗杆对主动齿的传动比。
1.3 卧式杠杆木薯拔起装置的工作原理分析
卧式杠杆木薯拔起装置是一种能够实现木薯拔起的机械化夹持与拔起的农业机械设备,其整体运动是靠人力推动把手使得该装置向前运动,通过转动手轮带动蜗轮蜗杆转动进而驱动双齿轮运动,实现该装置的夹持运动;而通过以转动轴的轴心为支点,作用在把手上的力为主动力,作用在夹持手柄上的力为阻力,实现装置的拔起功能。
在双齿轮驱动夹持木薯拔起机构中,用右转动夹持手柄调节螺栓和左转动夹持手柄调节螺栓使得右夹持手柄和左夹持手柄分别与从动齿转动轴和主动齿转动轴连接在一起,使得夹持手柄随着齿轮转动轴的转动而转动。由于外啮合齿轮的齿轮转动方向相反,当主动齿顺时针转动时,从动齿逆时针转动,左夹持手柄和右夹持手柄会靠近,进行木薯杆的夹持工作。
在蜗轮蜗杆自锁木薯拔起机构中,通过转动手轮带动蜗轮蜗杆转动进而驱动双齿轮运动,实现该装置的夹持运动;同时,利用蜗轮蜗杆的自锁原理,可以将木薯杆紧紧地夹持住,方便木薯的拔起工作。此外,通过往下压把手,以转动轴的轴心为支点,以作用在把手上的力为动力,作用在夹持手柄上的力为阻力,形成一个杠杆机构,从而实现木薯的拔起工作。
在多自由度木薯拔起机构中,通过转动轴的作用可以实现铅直方向的转动,从而实现木薯的拔起运动;通过导槽轮在左导槽和右导槽的滑动实现水平方向的进给运动;通过转动轴承的作用实现水平方向的旋转运动,从而能够在夹紧木薯杆的情况下左右摆动把手,使得木薯杆的根部松动,便于进行拔起工作;此外,还能够利用弹簧的弹性作用实现装置的自动复位功能。该装置的多自由度设计能够满足绝大部分的生产需要,具有很好的应用前景。
2 对卧式杠杆木薯拔起装置的有限元分析
在UG中做好三维造型后,直接在UG中进行有限元分析。有限元分析的目的在于机械的可运行性及卧式杠杆木薯拔起装置的材料是否满足实际的工作需要的问题。首先对该装置的整体进行网格的划分(见图2),以此来模拟该装置在实际使用过程中的受力情况,从而验证卧式杠杆木薯拔起装置的材料是否满足实际的工作需要。在图2中对装置的整体进行了网格划分,定义网格尺寸为5mm,定义网格的划分方法为六面体为主,即让有限元模型具有尽量多的六面体网格,最后生成网格。

图2 卧式杠杆木薯拔起装置的的网格划分图Fig.2 The grid division of the horizontal lever casserole uplift device
蜗轮蜗杆及双齿轮驱动夹持部分作为装置的重要组成部分,其中蜗轮蜗杆的自锁作用能够使得装置紧紧地夹紧木薯杆,方便木薯的夹持和拔起工作;而双齿轮驱动夹持部分则利用外啮合传动齿轮的旋转方向相反,实现夹持手柄的夹持作用。在图2中对装置的整体进行了网格的划分,然后对该装置的双齿轮驱动夹持部分进行力学分析,得出了卧式杠杆木薯拔起装置的夹持机构的等效应力云图及等效位移云图,如图3、图4所示。
根据具体工作情况分析,零件需要有足够的韧性、耐磨性及强度,因此使用中碳马氏体钢。中碳马氏体钢的弹性模量E=32GPa,屈服极限δs=380MPa,泊松比μ=0.3。通过UG的指派材料功能进行材料属性编辑。
此时,夹持手柄作为卧式杠杆木薯拔起装置的主要受力部件,此时着重对夹持手柄进行力的分析,同时对夹持手柄与木薯杆接触面的垂直面上向外施加100N的作用力,以及在重力方向上施加80N的作用力,由此可得出了如图3、图4所示的卧式杠杆木薯拔起装置夹持机构的等效应力云图及等效位移云图。
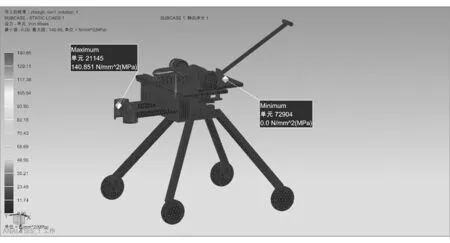
图3 卧式杠杆木薯拔起装置的等效应力云图Fig.3 Equivalent stress cloud diagram of horizontal lever cassava pull up device
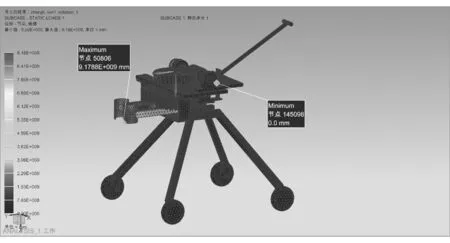
图4 卧式杠杆木薯拔起装置的等效位移云图Fig.3 Equivalent displacement cloud diagram of horizontal lever cassava pull up device
3 对卧式杠杆木薯拔起装置的结果分析
经有限元计算,夹持手柄最大应力发生在夹持手柄的中间位置,最大应力为140.851MPa,此时卧式杠杆木薯拔起装置满足强度和刚度要求。
4 对卧式杠杆木薯拔起装置的实验及分析
由上述有限元分析可知:卧式杠杆木薯拔起装置满足强度和刚度要求。经过严格对木薯生活环境以及生长规律的研究,不断改进卧式杠杆木薯拔起装置的机构,确定了各零部件的所使用的材料及装配工艺,并进行实验和采收效率测试,以保证卧式杠杆木薯拔起装置的强度和刚度能够满足实际的生产要求,最大限度地减轻农民们劳动强度。卧式杠杆木薯拔起装置的自锁性能好,夹持力度大,对木薯的夹持及拔起有很好的适应性,实物图如图5、图6所示。

图5 卧式杠杆木薯拔起装置整体实物图Fig.5 The graph of the horizontal lever cassava device to pull up with the overall physical diagram

图6 卧式杠杆木薯拔起装置部分实物图Fig.6 The graph of the horizontal lever cassava device to pull up with the portion physical diagram
5 结论
经过有限元分析及对装置的实地测试可知:卧式杠杆木薯拔起装置具有良好的工作可靠性和适应性。利用UG软件真实再现了卧式杠杆木薯拔起装置的夹持手柄的应力与变形情况,结果表明:满足强度和刚度要求,具有明显优于传统手工的优势,满足了社会生产需要,极具发展前景。
