基于任务协同的无人机多侦察载荷使用
2018-08-10张海峰韩芳林
张海峰,韩芳林
(海军航空大学,山东烟台264001)
当今战场环境日趋复杂,运用单一侦察载荷获取大范围、高风险区域的目标信息难度增加。无人机与多侦察载荷结合,充分发挥无人机无人驾驶、性价比高、控制灵活等特殊优势和各侦察载荷的性能特点,较好地适应了战场变化,满足了侦察任务需求。
本文结合无人机的作战特点、侦察方式、载荷性能、航路规划等,根据不同的作战任务需求,合理设计侦察载荷的协同使用方案,利用有限的侦察资源,在较短时间内以最大概率发现目标,获得最优侦察效果。
1 侦察载荷性能及使用分析
从当前国内外先进无人机装备的侦察载荷可知,无人机携带的侦察载荷主要有电子信号侦察设备(Electronic Signal Reconnaissance Equipment,ESRE)、合成孔径雷达(Synthetic Aperture Radar,SAR)和CCD(Charge Coupled Device)相机等光电侦察设备。
电子信号侦察设备利用高灵敏度的探测系统(宽开引导分系统、引导仪测向分系统、高增益探测分系统)搜索目标电磁辐射信号,经识别、分析等得到反映目标电磁参数和位置信息等数据;可在远距离、大范围内对电磁信号进行定位,减少了侦察的盲目性,提高了侦察效率,但定位精度一般且不能对目标进行观测成像。电子信号侦察设备的性能指标见表1。
SAR通过在无人机的直线飞行过程中持续地发射微波脉冲,并接收目标的散射回波来实现合成孔径,经过放大、混频等得到目标的反射特性、距离信息和相位信息等数据。
表1 电子信号侦察设备性能指标Tab.1 Performance indicators of ESRE
SAR可采用广域GMTI、GMTI/SAR、条带SAR和聚束SAR的工作模式。聚束SAR模式可对小区域内的目标进行高分辨率SAR成像;条带SAR模式可对侦察区域进行大范围成像;广域GMTI模式可对侦察区域大范围内的运动目标进行连续、长时间监视;SAR/GMTI工作模式既能对静止目标进行成像,又可对运动目标进行搜索跟踪。SAR的性能指标见表2。

表2 SAR性能指标Tab.2 Performance indicators of SAR
CCD相机以搜索目标的图像为信息源,通过光学成像扫描三维空间,获得目标的几何尺寸、位置信息等,能够对目标进行高分辨率成像、检测、跟踪和定位,也可将图像上传至地面指控站,与原始图片进行比对。CCD相机的性能指标见表3。各侦察载荷的性能对比如表4所示。

表3 CCD相机性能指标Tab.3 Performance indicators of CCD camera
表4 侦察载荷性能对比表Tab.4 Confrontation of reconnaissance load performance
为获得较好的侦察效果,依据各侦察载荷的性能特点,无人机采用的侦察航路有“一字形”、“Z字形”和“8字形”3种。其中,“一字形”可适用于CCD相机、电子信号侦察设备以及SAR的广域GMTI、聚束SAR和条带SAR模式的侦察;“Z字形”适用于CCD相机、电子信号侦察设备以及SAR的条带SAR和广域GMTI工作模式;“8字形”适用于小区域内CCD相机和聚束SAR工作模式的高精度侦察。
在侦察载荷协同工作时,还要考虑无人机姿态的控制。电子信号侦察设备和CCD相机可进行360°全覆盖侦察,对无人机姿态要求较低;SAR的侦察区域是无人机飞行方向的正侧向,只能对无人机的两侧部分区域进行倾斜扫描侦察,且不能够两侧同时侦察。
2 多侦察载荷协同方案设计
在设计多侦察载荷协同使用方案时,要充分考虑无人机侦察的各种约束条件,包括平台性能、战场环境、载荷性能、目标特性、时间要求、航路规划和姿态控制等,合理配置侦察载荷,充分发挥各侦察载荷的优势,提高协同侦察的使用效能。
2.1 电子信号侦察设备与SAR协同
该方案主要利用电子信号侦察设备提供粗略定位信息,再运用SAR进行高精度侦察。电子信号侦察设备在远距离、大范围探测到目标辐射源,将目标信息发至数据处理器,经处理后传输至无人机控制终端,重新规划无人机航路并采用电子信号侦察和条带SAR模式协同,对目标精确定位;飞行至聚束SAR作用距离时,聚束SAR开始工作,以提高对目标的凝视时间,增强在复杂环境下对目标的高分辨率成像观测能力。电子信号侦察设备与SAR协同侦察过程如图1所示。

图1 电子信号侦察设备与SAR协同侦察示意图Fig.1 Collaborative scouting diagrams for ESRE and SAR
2.2 电子信号侦察设备与CCD相机协同
该方案主要用于对侦察区域进行即时可视侦察或采集高分辨率目标图像。电子信号侦察设备在远距离、大范围探测到目标辐射源,控制终端操纵无人机规划航路抵近目标区域,当无人机抵近至CCD相机工作距离时,CCD相机同电子信号侦察设备协同观测目标;到达目标规定距离后,拍摄高分辨率图像或进行即时可视侦察。电子信号侦察设备与CCD相机协同侦察过程如图2所示。

图2 电子信号侦察设备与CCD相机协同侦察示意图Fig.2 Collaborative scouting diagrams for ESRE and CCD camera
2.3 SAR与CCD相机协同
SAR开启广域GMTI模式或GMTI/SAR模式,在较大范围内对侦察区域进行扫描搜索,实现对运动目标的搜索和跟踪。鉴于SAR图像判读的复杂性,为提高对目标的探测或对运动目标即时可视侦察能力,无人机规划航路到达目标区域规定距离后,开启CCD相机侦察模式,实现对目标的探测成像、定位和跟踪。SAR和CCD协同侦察过程如图3所示。
图3 SAR与CCD相机协同侦察示意图Fig.3 Collaborative scouting diagrams for SAR and CCD camera
2.4 电子信号侦察设备、SAR与CCD相机协同
该方案主要用于对目标的精确定位、观测成像和特征检测。电子信号侦察设备在远距离探测到目标辐射源的位置时,控制无人机规划航路抵近目标区域。侦察静止目标时,采用条带、聚束SAR或CCD相机分别在作用距离范围内对目标进行观测成像或即时可视侦察;侦察运动目标时,则运用GMTI、GMTI/SAR或CCD相机分别在作用距离范围内对目标进行跟踪和即时可视侦察。若电子信号侦察设备未侦察到目标,可采用SAR工作模式再规划其他侦察方案。电子信号侦察设备、SAR和CCD相机三者协同侦察过程如图4所示。

图4 电子信号侦察设备、SAR与CCD相机协同侦察示意图Fig.4 Collaborative scouting diagrams for ESRE,SAR and CCD camera
3 多侦察载荷协同效能评估
无人机的侦察能力主要取决于无人机平台的导航能力、侦察载荷协同能力和宽带数据链的信息传输能力。计算公式可表示为[7]:

式(1)中:N为无人机的导航能力;∑A为侦察载荷协同能力;T为数据链的信息传输能力;ε1、ε2、ε3为各能力指标的权重系数,依据文献[7]分别取值0.15、0.65、0.2。
当无人机开启侦察载荷协同搜索目标时,后期侦察载荷的参数,如发现目标概率、目标定位精度等会受到前期侦察载荷搜索结果的影响。侦察载荷协同能力可由侦察载荷的能力与其相应的权重系数计算得:

式(2)中:A1为前期侦察载荷的能力指标;A12、A13为后期侦察载荷的能力指标;ω1、ω12、ω13为各项能力指标的权重系数。
电子信号侦察设备、SAR和CCD相机的侦察能力具体算法参考文献[1]。
SAR侦察能力算式为:

式(3)中:ξr为电磁环境对SAR侦察效果的影响系数;L为侦察作用距离;θ为最大搜索方位角;Pr为发现目标的概率;Kr为SAR的体制衡量系数;m为同时跟踪目标数量;Δr为目标的定位精度;ρr为SAR的分辨率。
电子信号侦察设备侦察能力算式为:

CCD相机侦察能力算式为:

式(5)中,C0为环境对CCD相机侦察效果的影响系数。
多侦察载荷协同使用状态下,后期使用的侦察载荷的发现目标概率P12和目标定位精度Δ12的计算公式为:
式(6)中:P1为前期侦察载荷发现目标的概率;Δ1为前期侦察载荷对目标的定位精度;为前期侦察载荷的同时跟踪目标数目;P2为后期侦察载荷自身发现目标的概率;Δ2为后期侦察载荷自身对目标的定位精度;λ为侦察性能参数影响系数。
4 实例仿真
以规划好的侦察任务为前提,在获取目标的初步情况描述后,无人机导航进入相应的任务区域,无人机开启侦察载荷对目标区域进行搜索任务,侦察航路规划一般采用“Z字形”。假设对无人机携带4种不同的侦察载荷协同使用方案进行仿真分析。结合2.1、2.2、2.3和2.4小节,电子信号侦察设备和SAR的协同使用为方案A,电子信号侦察设备和CCD相机的协同使用为方案B,SAR和CCD相机的协同使用为方案C,电子信号侦察设备、SAR与CCD相机协同使用为方案D。依据式(1)~(6),对4种侦察载荷的协同使用方案进行评估。各方案侦察效能的计算结果如表5所示。

表5 各侦察载荷效能对比表Tab.5 Effectiveness confrontation of reconnaissance loads
根据无人机侦察任务的作战环境,假定4种不同的电磁、天气情况如表6所示。其中,任务情况一与情况二相比,电磁环境威胁增加;任务情况三与情况一相比,天气条件较为恶劣;任务情况四与情况一相比,电磁环境威胁和天气恶劣条件都有所增强。
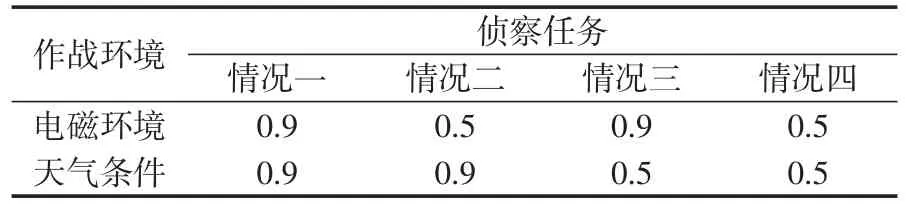
表6 无人机不同作战环境Tab.6 Different operational environment of UAV
依据式(1)~(6),无人机处于不同的侦察作战环境中的侦察效能如表7所示。

表7 无人机不同作战环境下的侦察效能Tab.7 Reconnaissance effectiveness in different operational environment of UAV
无人机处于不同的侦察作战环境中的侦察效能对比如图5所示。
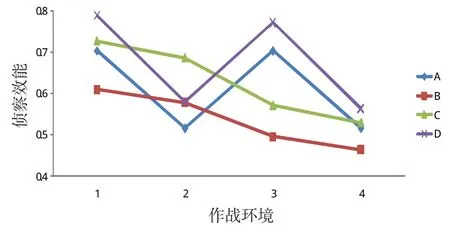
图5 无人机侦察效能对比图Fig.5 Reconnaissance effectiveness confrontation of UAV
仿真结果分析:
1)由表5、7和图5可知,当电磁环境和天气条件较好时,方案D中的电子信号侦察设备、SAR和CCD相机3种侦察载荷的侦察距离远近结合,且定位精度和分辨率较高,其侦察效能最优;方案C和A侦察效能次之;方案B的电子信号侦察设备和CCD相机协同侦察时,前者侦察距离虽远,但定位精度一般,而CCD相机只可在小范围进行探测成像,不便于协同侦察,故其侦察效能最低。
2)由表7和图5可知,在复杂电磁环境下,电子信号侦察设备和SAR受影响较大,各方案的侦察效能随电磁环境影响增加而降低,尤其在协同使用电子信号侦察设备和SAR的方案A中,协同的2种侦察载荷都会受到电子干扰影响,因而方案A的侦察效能最低,方案C的侦察效能最优;
3)在恶劣天气条件下,CCD相机的侦察效能受影响较大,方案B和C因为使用CCD相机,其侦察效能下降幅度最大,侦察效能最低;方案D采用电子信号侦察设备和SAR,受影响较小,侦察效能最优;方案A次之。
5 结束语
本文在分析无人机侦察载荷性能特点和侦察作战使用的基础上,设计了多侦察载荷协同使用方案,构建无人机多载荷协同侦察效能评估模型,并对无人机在不同作战环境下的多载荷协同使用方案进行了仿真评估,检验了各方案在复杂电磁环境和恶劣气象条件下的侦察能力;为无人机的侦察载荷的协同作战使用提供了参考依据。
