基于改进型扰动观测器的IPMSM无传感器控制
2018-08-09杨振强王继超
周 静,杨振强,王继超
(1.大连理工大学,大连 116024;2.中国人民解放军31696部队,锦州 121017)
0 引 言
无位置传感器技术,可以通过建立合理的数学模型,替代传统的机械式编码器,获得电机的位置信息。由于此技术能降低系统成本,减小电机体积,降低运行环境要求,因此具有较高的研究价值[1-3]。
对比表贴式永磁同步电机(以下简称SPMSM),内置式永磁同步电机(以下简称IPMSM)是嵌入式转子结构,具有可靠性强、调速范围大、效率高等优点,是目前发展的主流[4-6]。但是,IPMSM存在凸极效应,磁路非线性,电机数学模型相对复杂,在无位置传感器技术中,用于转子位置信息估计的观测器设计与调试过程相对复杂,不易于工程实现[7,8],本文致力于解决此类问题。
近年来,随着科研工作者对无位置传感器技术研究的深入,取得了大量的研究成果。文献[9]提出了一种基于合成反电动势的滑模状态观测器,实现了IPMSM无位置传感器控制系统的高速稳态运行,但是在开关切换时容易引入高频信号,需要通过两级滤波器对其进行消除,调试起来复杂。文献[10]基于非线性观测器实现了IPMSM无位置传感器控制,转子位置与转速估算精度高,缺点是设计过程复杂、计算量大,且计算过程中需要借助状态的微分,导致噪声信号的放大,因此采用了低通滤波器,调节过程较复杂。文献[11]在一种新型的扰动观测器的基础上实现了SPMSM无位置传感器控制。其设计过程简单,结果精确,调试过程简单,容易应用。但是,其观测模型是基于SPMSM的电流状态方程搭建,因此不适用于IPMSM。
本文结合多种控制策略的优点,研究了一种基于改进型扰动观测器的IPMSM控制方法。此方法通过合成反电动势,得到与SPMSM相似的模型,再利用中间变量转换,在不添加滤波器的条件下求得理想的合成反电动势,将其与锁相环结合得到转子位置信息。利用一个随转速变化的误差补偿环节,消除了因为模型误差导致的转子位置估算误差。通过对仿真结果分析,此方法调试过程简单,能够精确地估计转子位置信息,从而完成高性能的IPMSM无位置传感器控制。
1 IPMSM数学模型
在静止α,β坐标下,IPMSM的电压方程如下:

可以将式(1)改写为矢量形式:

可以看出,因为IPMSM 的Ld,Lq不等,半差电感不为零,附加电压ηαβ受θe的影响,导致利用反电动势搭建观测器的无传感器技术不适用于IPMSM。因而,本文通过定义合成反电动势,使IPMSM的数学模型变成与SPMSM 相似的模型。
通过坐标变换理论,对附加电压ηαβ变换,可得:
式中:id为直轴电流。
通过将附加电压ηαβ分解成E1,E2,E3,由式(2)和式(3)可知,E2与反电动势Eαβ的相位相同,可以将其合并。
定义合成反电动势Esyn:
E3与反电动势Eαβ正交,而且和合成反电动势的相比,E3的幅值比较小,为了简化计算,可以将其忽略。
定义合成后的输入电压矢量vαβ:
将合成后的量代入式(1),IPMSM 在α,β坐标系下的电压方程可以变形:
从而,得到以定子电流为状态变量的电机电流状态方程:
2 扰动观测器的设计
2.1 扰动观测器的数学模型
干扰下的时域微分方程:
式中:x是状态变量,u是输入量,d是扰动量;A,Bu及Bd分别是与x,u及d对应的系数矩阵。
在干扰信号d变化迟缓的情况下,d的导数约等于0,可以忽略。
估计误差:

对应的扰动观测器可以表示:
式中:L为扰动观测器的增益矩阵。
本文采用了文献[11]中利用中间变量转换的改进型扰动观测器,代入式(10),可以得到:
定义中间变量:

从而,得到扰动观测器的模型:
由于借助中间变量z,扰动量的估计不用计算状态变量微分,所以不用额外设计滤波器对噪声信号进行消除,从而简化了观测器。
本文将静止α-β坐标下合成反电动势Esyn作为扰动量,建立基于合成反电动势的扰动观测器模型。
对式(7)的IPMSM电流状态方程整理可得:

从而,得到基于合成反电动势的观测器模型:
式中:l为扰动观测器的增益。
根据式(15),作出的扰动观测器结构图如图1虚线框所示。

图1 基于扰动观测器的转子位置估计
由图1可知,定子电压和电流经过改进型扰动观测器可以估计出合成反电动势。由于合成反电动势中有IPMSM转子位置和速度信息,结合PLL与对应的位置补偿后可以实现对转子位置和速度较为精确地估计[12-14]。
根据式(4)可以推出:
式中:k=pωm(ψf+2L1id)。
合成反电动势利用PLL实现对转子速度的估计,估计出的速度量再通过积分便能够求得转子位置。
2.2 转子位置补偿
为了消除因为观测器模型误差导致的转子位置估算误差,需要进行转子位置补偿。
对式(10)作拉氏变换,推导出扰动观测器的传递函数:
因此,扰动观测器可等效为一阶惯性环节。
结合式(4)推出估计值:
得到转子位置补偿公式:
2.3 李雅普诺夫稳定性
扰动观测器的动态误差方程可以表示:
为了使速度估计误差能够收敛,定义式(22)李雅普诺夫函数。
对其求导:
l<0
3 仿真分析
本文采用型号为GK6080-6AC31的IPMSM,表1给出了IPMSM相关参数,图2为IPMSM控制系统的结构框图。

表1 IPMSM主要参数

图2 基于改进型扰动观测器的IPMSM无位置传感器控制系统结构框图
在MATLAB/Simulink平台上设计了系统的仿真模型,通过对基于改进型扰动观测器的IPMSM无位置传感器控制系统实行仿真,确定观测器增益,验证了观测器对转子信息的估计性能。
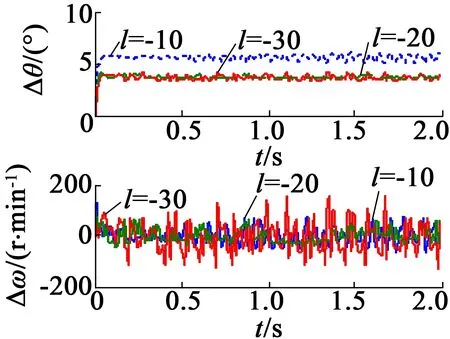
图3 不同增益下的转子误差
由此可知,增益越小,转子位置估计误差越小,但是转速误差波动越大。为获得较好的控制性能,系统选取的增益为-20。此增益选取方便,且产生的误差在系统允许误差范围内,满足系统要求。
选定增益后,讨论负载变化对系统的影响。在1 s时,突加负载转矩TL,TL的值分别取2 N·m,5 N·m,10 N·m。图4是负载变化对转速和位置误差的影响。由图4(a)可知,TL越大,转子速度下降的幅度越多,但仍能实现对给定转速的跟随。由图4(b)可知,TL越大,转子位置误差略有增加,转子位置误差最大不超过8°电角度。由此可知,观测器具有较强的鲁棒性。
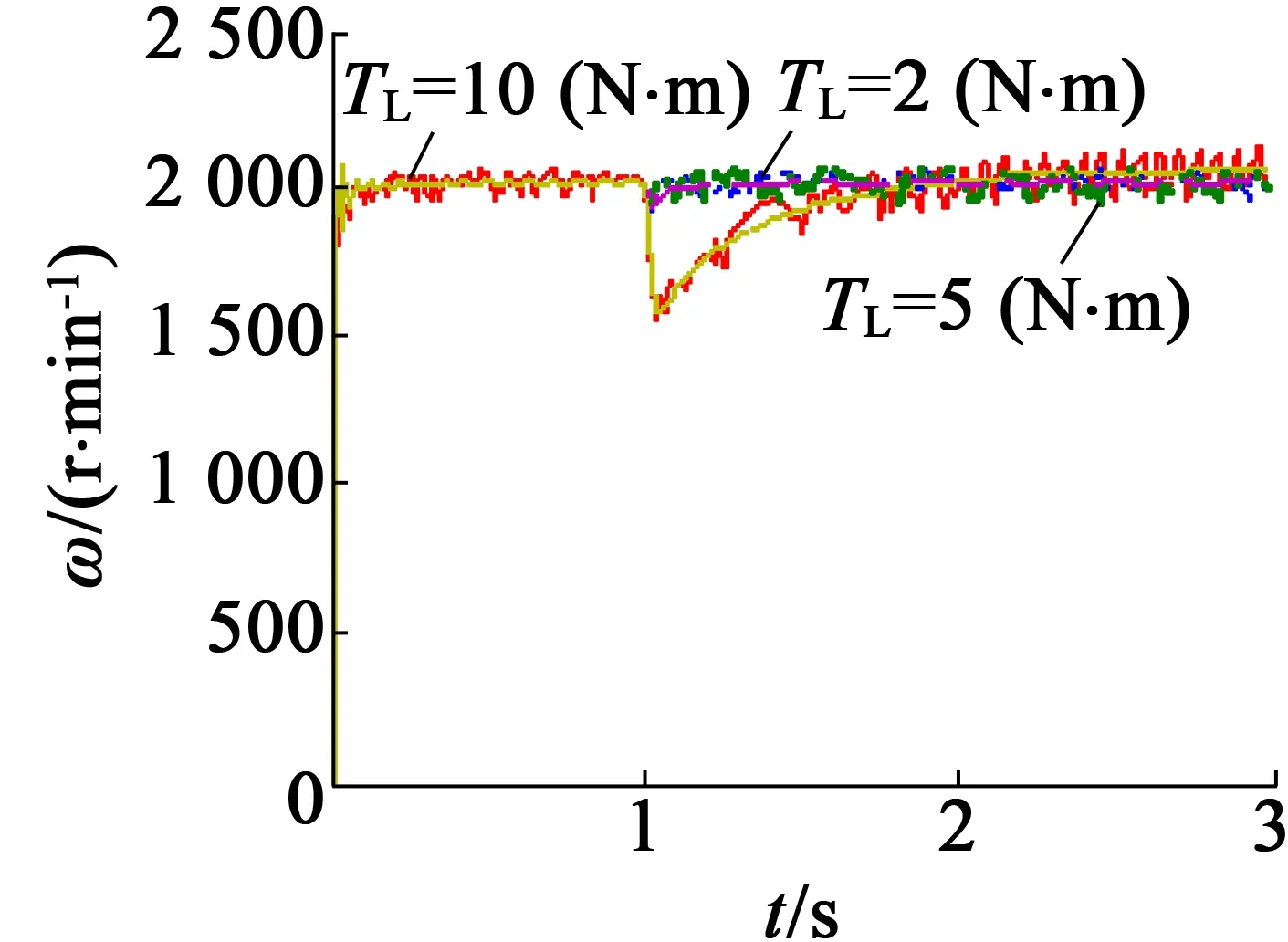
(a) 电机转速
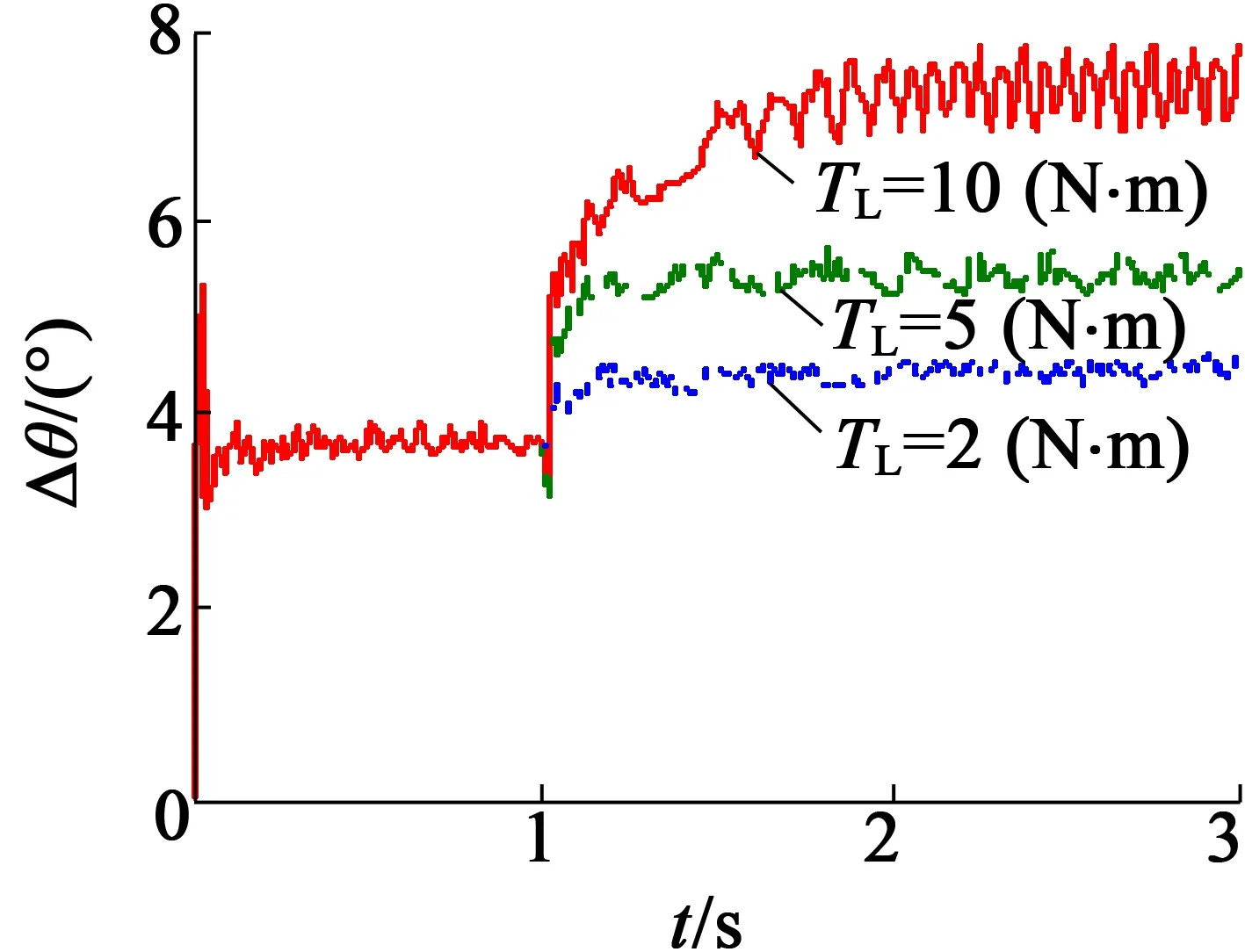
(b) 电机位置误差
系统仿真时间设为4 s,IPMSM稳态运行在TL=2 N·m条件下,在2 s时,将电机给定转速由500 r/min阶跃到2 000 r/min,系统波形如图5所示。从图5可以看出,估计转速能够对实际转速进行良好的跟随。在给定转速500 r/min 的情况下,转子的速度误差约±15 r/min,速度误差波动近似为3%。在给定转速2 000 r/min 的情况下,转子的速度误差近似为±50 r/min,速度误差波动约为2.5%,速度误差波动稍微有所减小,转子位置估计误差近似为4.6°电角度。

图5 转速阶跃变化时系统波形
为了进一步验证电机控制系统的性能,在1 s时,将IPMSM的转子速度在200 ms内,从500 r/min斜坡上升到2 000 r/min,运行后,再用同样的速率,降到500 r/min,系统波形如图6所示。
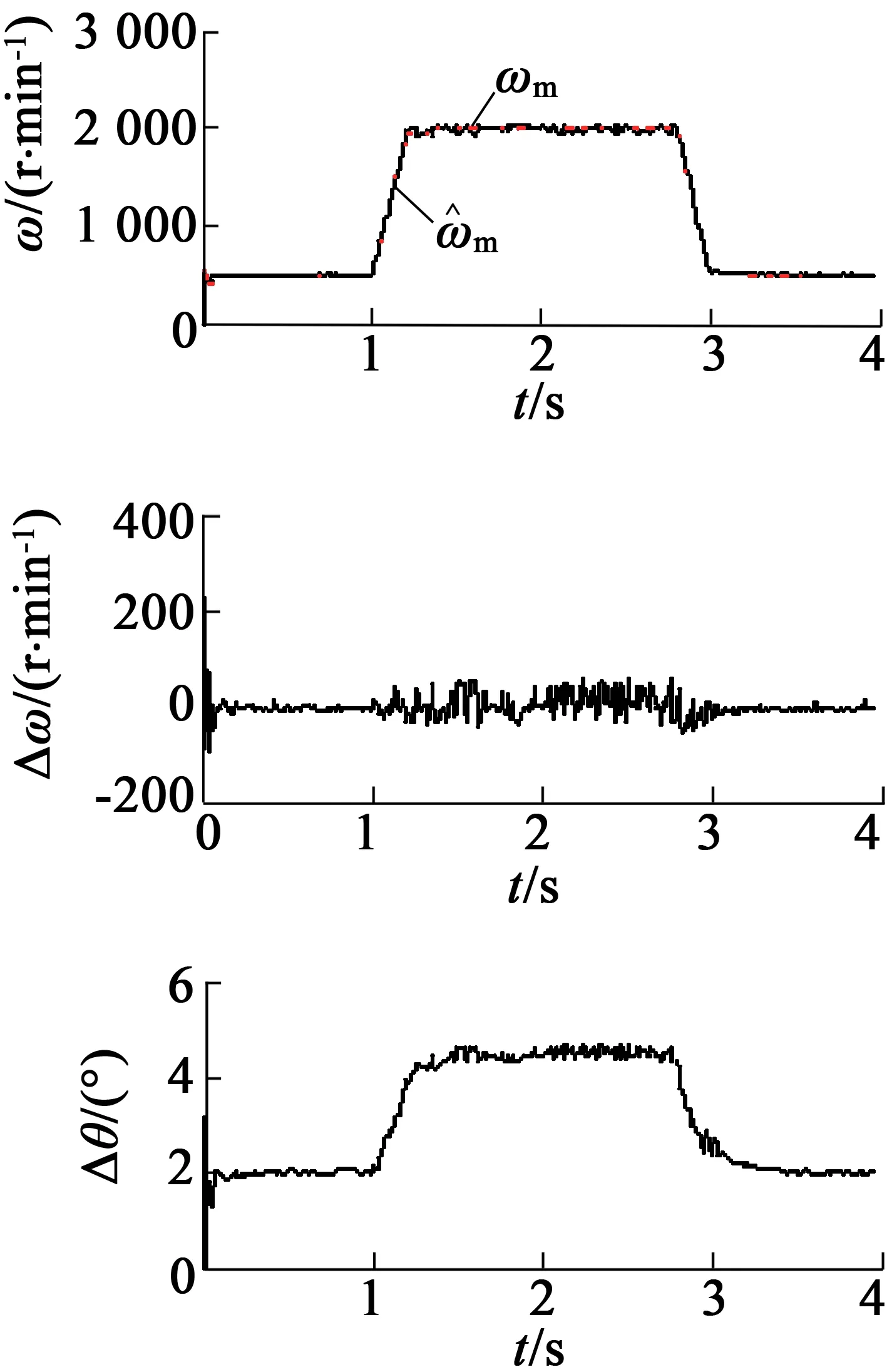
图6 转速斜坡变化时系统波形
从图6可以看出,在加减速过程中,估计转速同样能够对实际转速进行良好的跟随,转子速度动态误差小于50 r/min,静态误差小于15 r/min,始终不超过给定转速的3%,转子位置误差始终不超过4.6°电角度。
对比文献[9]和文献[10]中的观测器,此观测器设计相对简单,虽然转速误差波动略有增加,但是精度满足系统要求。
综上所述,此扰动观测器能够准确地估算转子位置和转速,实现了IPMSM高性能的运转。
4 结 语
本文基于改进型扰动观测器建立了IPMSM数学模型,将合成反电动势作为扰动量,利用中间变量,结合锁相环对转子位置和转速进行估算,实现了高性能的IPMSM无位置传感器控制。通过仿真分析了不同观测器增益和负载转矩对转子误差的影响,选择了合适的增益,完成了仿真验证,得到以下结论:
1) 改进型的扰动观测器利用中间变量,不用设计额外的滤波器,就可以估算出合成反电动势,模型设计与调试过程简单,易于工程实现,具有较高的应用价值。
2) 估算精度较高,在不同负载下具有较强的鲁棒性,可以在转速阶跃与斜坡变化时实现转子位置和转速的准确估算,拥有较高的动态与稳态性能。
3) 不足之处,此系统基于反电动势估计,适用于IPMSM中高速调速,所以,还需进行低速研究。
