轴向叠片磁阻同步电机模糊控制研究
2018-08-09陈学珍
陈学珍
(湖北理工学院,黄石 435003)
0 引 言
轴向叠片各向异性(以下简称ALA)磁阻同步电机叠片与叠片之间用非导磁导电材料填充,尽可能增大直轴电感,减小交轴电感,即提高凸极比(Ld/Lq)。高凸极比使电机又具有高效、高功率因数的特点[1,2],受到国内外不少学者的青睐。文献[3]研究了ALA转子电机开环VVVF变频起动存在振荡,采用转子轴上加机械惯性阻尼器的方法抑制振荡,有较好的效果。文献[4]采用直接转矩控制,获得了较好的起动性能,但Bang-Bang控制不可避免地导致转矩脉动。因为ALA转子电机直轴电感Ld受气隙磁场饱和影响较大,气隙磁场越饱和,Ld越小,凸极比越小,要想精确控制ALA转子电机,必须考虑电机参数变化的影响,这样势必给控制系统带来一定困难,而模糊控制不依赖于电机参数,正好可以解决此问题。因此本文对ALA转子电机进行模糊矢量控制研究。
1 ALA转子电机数学模型
ALA电机转子由高导磁冷轧硅钢片叠制而成,定子与交流异步电机相同,图1是4极ALA转子实物图,图2是转子截面图。

图1 4极ALA转子实物图
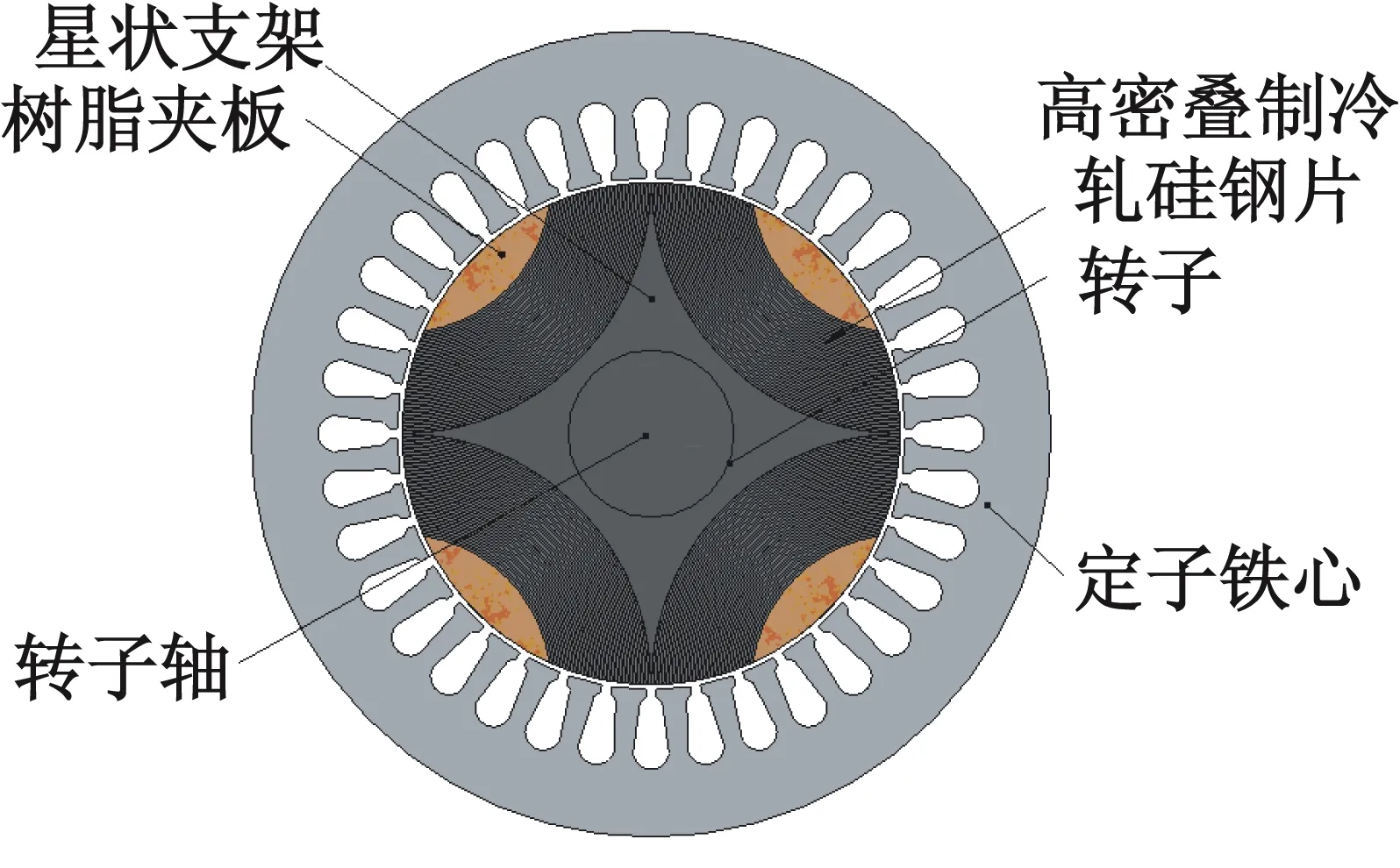
图2 ALA转子截面图
ALA转子电机在d,q参照系下的动态数学模型表达式:
式中:p为微分算子;Ld为直轴电感;Lq为交轴电感;ω为转子电角速度;id为直轴电流;iq为交轴电流;ud为直轴电压;uq为交轴电压。
电磁转矩方程式:
式中:p为极对数;T为电磁转矩。
运动方程式:
式中:TL为负载转矩;B为机械粘性摩擦阻尼系数;Ω为机械角速度;J为转动掼量。
为实现电机快速起动,采用最大转矩电流比控制。定子电流轨迹为id=iq。在极限电流islim限制下,定子综合电流is应满足表达式:
2 模糊控制器设计
2.1 系统原理框图


图3 系统原理框图
2.2 模糊控制器的控制规则设计

1) ifedis NB,thenudis NB;
2) ifedis NM,thenudis NM;
3) ifedis NS,thenudis NS;
4) ifedis Z,thenudis Z;
5) ifedis PS,thenudis PS;
6) ifedis PM,thenudis PM;
7) ifedis PB,thenudis PB;
ed和ud隶属度函数分别如图4和图5所示。

图4 ed隶属度函数

图5 ud隶属度函数 同理,模糊控制器2的隶属度函数分别如图6和图7所示。

图6 eq隶属度函数

图7 uq隶属度函数
3 仿真和实验结果
在MATLAB/Simulink环境下建立了仿真模型,隶属度函数用S函数描述。初始时刻电机加载2 N·m,运行到1 s时刻突加负载到14 N·m,运行至2 s时刻突减负载到12 N·m。仿真样机主要参数如下:额定电压为380 V,额定电流为5 A,额定功率为2.2 kW,转动惯量为0.007 kg·m2,转子电阻为2.5 Ω,直轴电感Ld为345 mH,交轴电感Lq为38 mH,额定转速为1 500 r/min。仿真结果如图8所示。由图8可见,突然加大负载,电机有短时间微小的振动,突然减小负载对电机基本没影响。设计的模糊控制器有较好的抗扰动性能。稳定运行时,电磁转矩几乎没有脉动。

(a) 电磁转矩
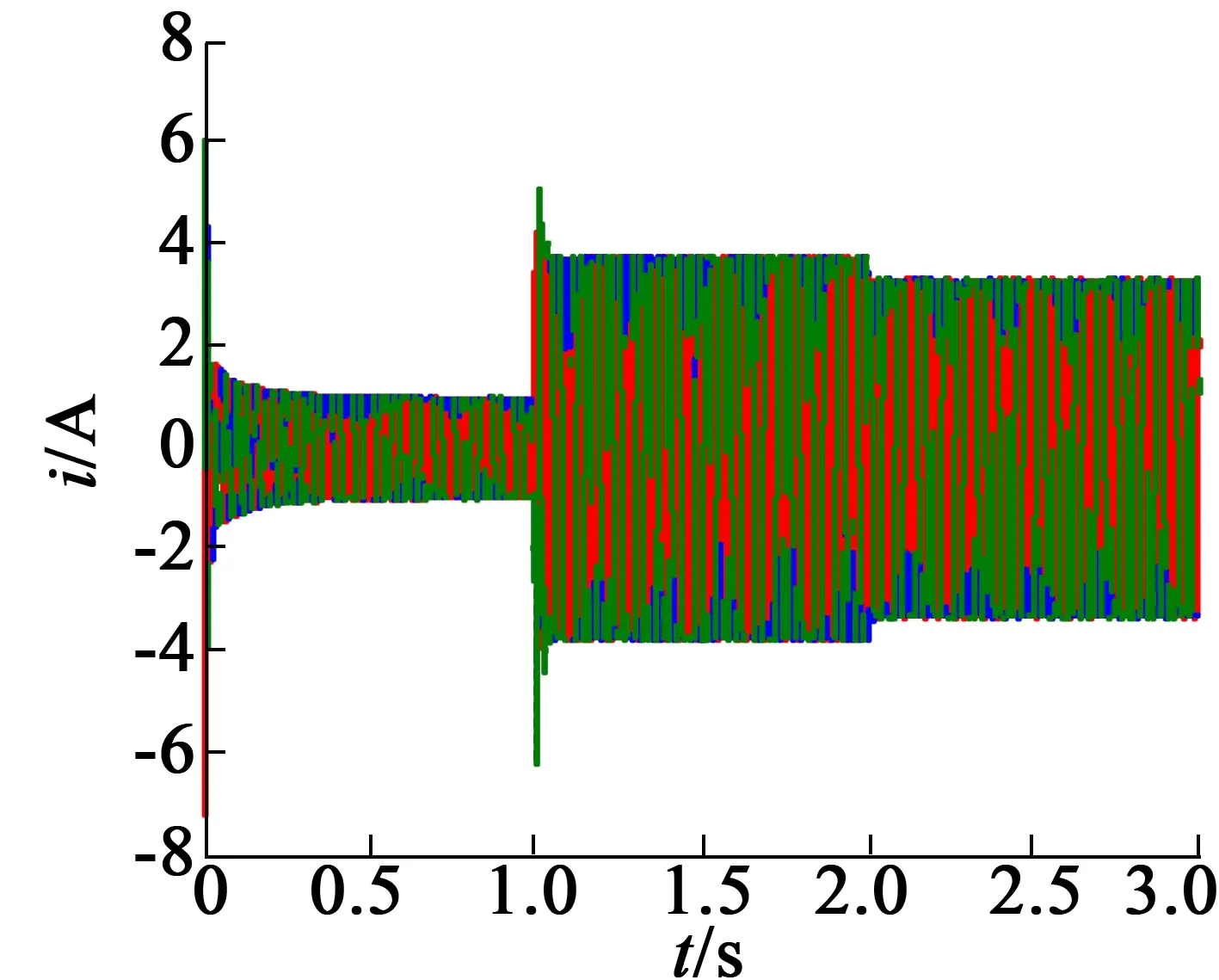
(b) 三相电流

(c) 转速
实验系统采用TI公司TMS320F2812为控制器
的核心处理芯片,实验结果如图9所示。图9(a)是空载运行速度曲线,纵轴每格对应1 630 r/min,横轴每格对应1 s;图9(b)是一相空载稳态电流波形,纵轴每格对应1 A,横轴每格对应5 ms。由图9可见,电机有良好的空载起动和稳定运行性能。仿真和实验结果表明所设计的模糊控制器是合理和有效的。
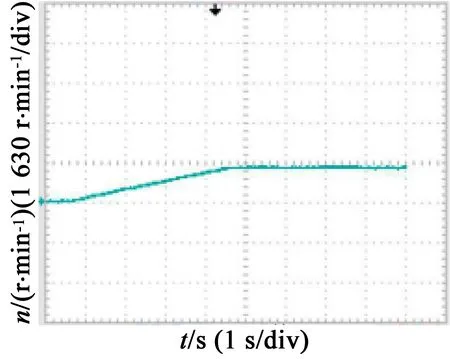
(a) 空载运行速度曲线
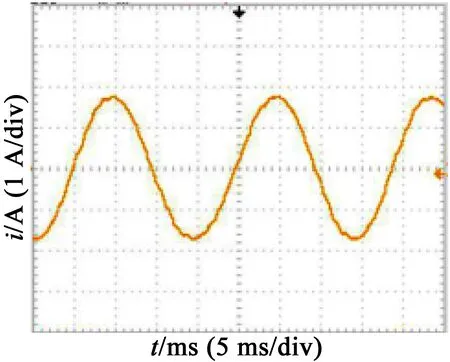
(b) 一相空载稳态电流波形
4 结 语
本文分别设计了适合ALA转子电机直轴电流和交轴电流误差控制的隶属度函数及对应输出的直轴电压和交轴电压隶属度函数,建立了模糊控制系统MATLAB/Simulink仿真模型。仿真结果表明,ALA转子电机采用模糊控制,改善了电机的起动性能,提高了抗扰动能力,减小了转矩脉动,实验结果表明了设计的合理和有效性。
