基于放大机构的压电微电动机设计与力学分析
2018-08-09赵佳峰
赵佳峰,李 冲
(1.青岛工学院,青岛 266300;2.江苏科技大学,镇江 212003)
0 引 言
压电陶瓷材料因具有响应速度快、位移分辨率高、无电磁干扰及易于微型化等优点而被应用于能量采集、精密定位和微型驱动等领域[1-3]。
在压电驱动方面,各种类型压电微电动机和驱动器被研制出来。Dabbagh等[4]设计出一种工作在面内和面外耦合振动模态的压电超声波电动机,该电动机通过增大定转子间的接触面积来减小磨损和提高寿命,在驱动频率49.6 kHz和激励电压50 V时,它的无负载转速和转矩分别为122 r/min和0.32 mN·m。Mashimo[5]提出亚毫米级的压电超声波电动机。实验表明:与其他方式驱动需电机相比,这种电动机在毫米和亚毫米级范围内具有明显优势。Toyama等[6]提出一种防水压电超声波电动机,通过对压电元件进行绝缘化处理,该种电动机能够应用于室外环境中。
国内学者对压电电动机进行了一系列的研究。哈尔滨工业大学Wang S等[7]提出一种能够持续输出运动的新型旋转压电电动机,该电动机在激励电压150 V、驱动频率1 Hz时的最大负载和最大输出转矩分别为2.65 N和4.94 mN·m。南京航空航天大学Yang L等[8]提出一种基于四侧板振动的双转子混合压电超声波电动机,该电动机的最大输出转矩为8 mN·m,无负载转速为140 r/min。上海交通大学Li S等[9]利用面内剪切模态设计了一种单晶体压电超声波电动机,该电动机具有结构简单、低频驱动、高机电耦合系数及2倍功率密度等特点。北京大学Li X等[10]研制了一种工作在200 ℃高温下精确作动的纵向和弯曲双模态的直线压电电动机, 200 ℃下该电机平稳运动的驱动力和速度分别为0.35 N和0.042 m/s。
传统压电电动机通过定转子间的摩擦力来传递运动,其缺点是定转子间磨损严重,造成电机的寿命减小。因此,本文研究一种基于连杆放大机构的旋转压电微电动机,将活齿的滚动接触取代传统压电电动机的摩擦接触,具有低速、大转矩和寿命长等优点。本文针对这种旋转压电微电动机进行结构设计和静力学分析。
1 电机工作原理


(a) 整体结构
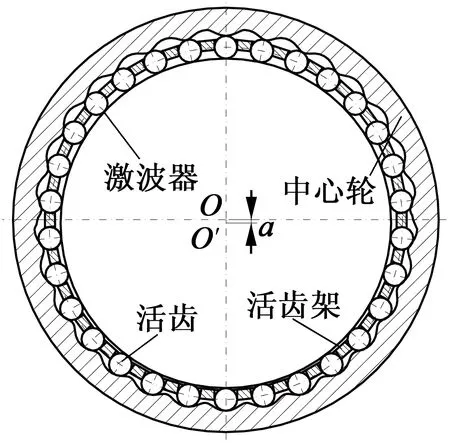
(b) 传动系统图
2 电机设计与力学计算
设计旋转压电微电动机活齿数zp=30,中心轮波齿数zc=29,则系统传动比:
设计激波器偏心距a=0.3 mm,中心轮齿廓是电机传动系统的关键部位,如图2所示,则中心轮齿廓方程:
式中:φ为活齿架转角;ψ是活齿中心运动轨迹上该点法线与x轴的夹角;b=rs+rp,rs,rp分别为波发生器和活齿的半径。

图2 中心轮齿廓曲线
电机由带正偏置的正弦信号驱动,如图3所示,则电机的驱动信号方程:
“当时野生菌在深圳的市值差不多是40元每公斤,而酒店里一盘炒鸡枞卖到120元,一盘菜也就只需要一公两的原料而已,相当于一公斤鸡枞就可以卖到八九百元。”李志勇和酒店顺利达成了合作协议,他也明白,要让家乡的产品走出去,我们首先要自我“包装”,更要将家乡丰富的纯天然产品也好好包装一下。他风风火火赶回家,跟妻子一起精心挑选了20几个品种的野生菌发往深圳,不到半年,生意逐渐有了方向。
式中:Up-p为驱动信号峰峰值;f为驱动信号频率。
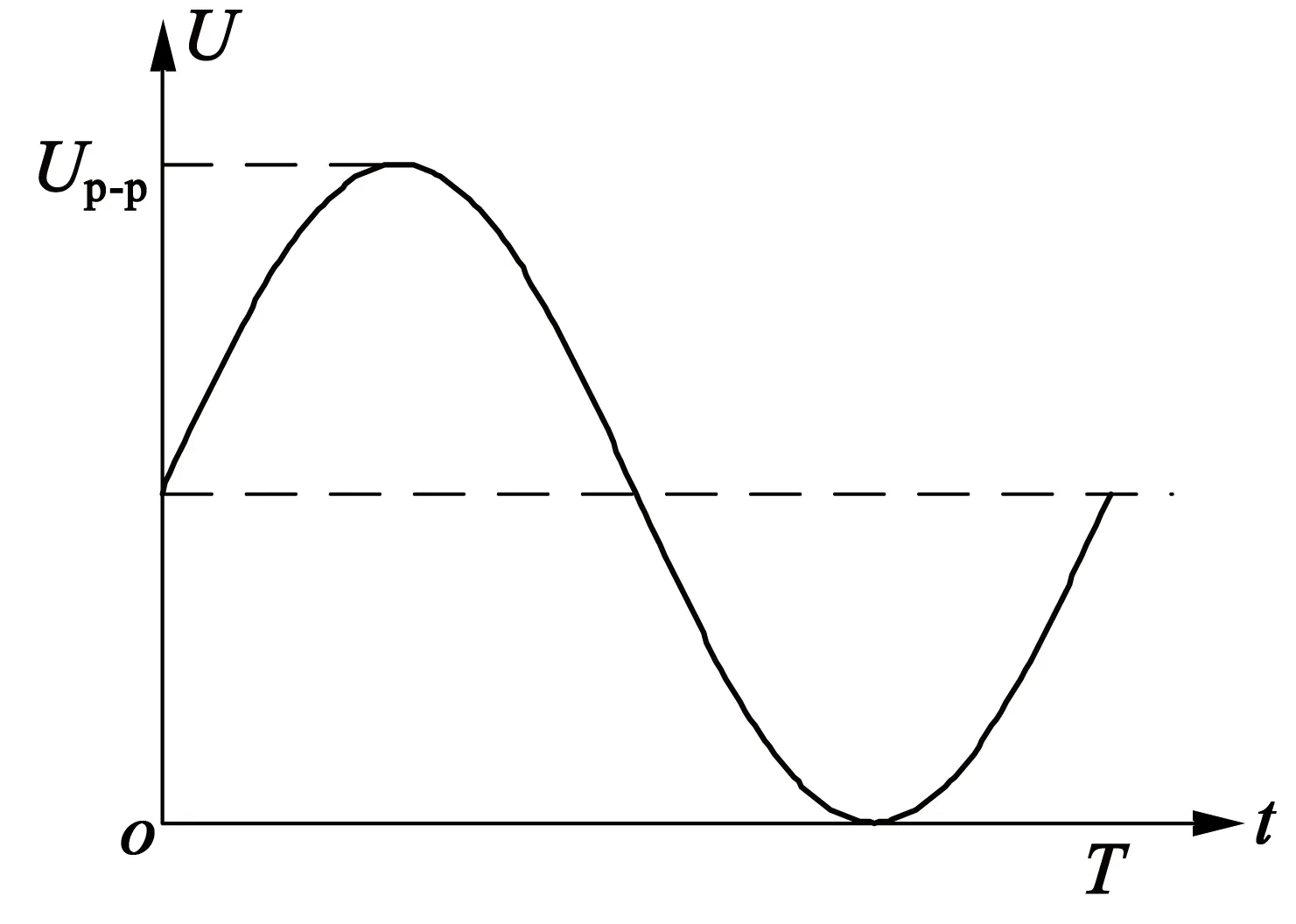
图3 电机驱动信号
压电叠堆输出力表达式:

压电叠堆的输出位移:
式中:n为压电陶瓷片的片数。
图4为放大结构计算图。由图4可知,放大机构末端D点处的受力:
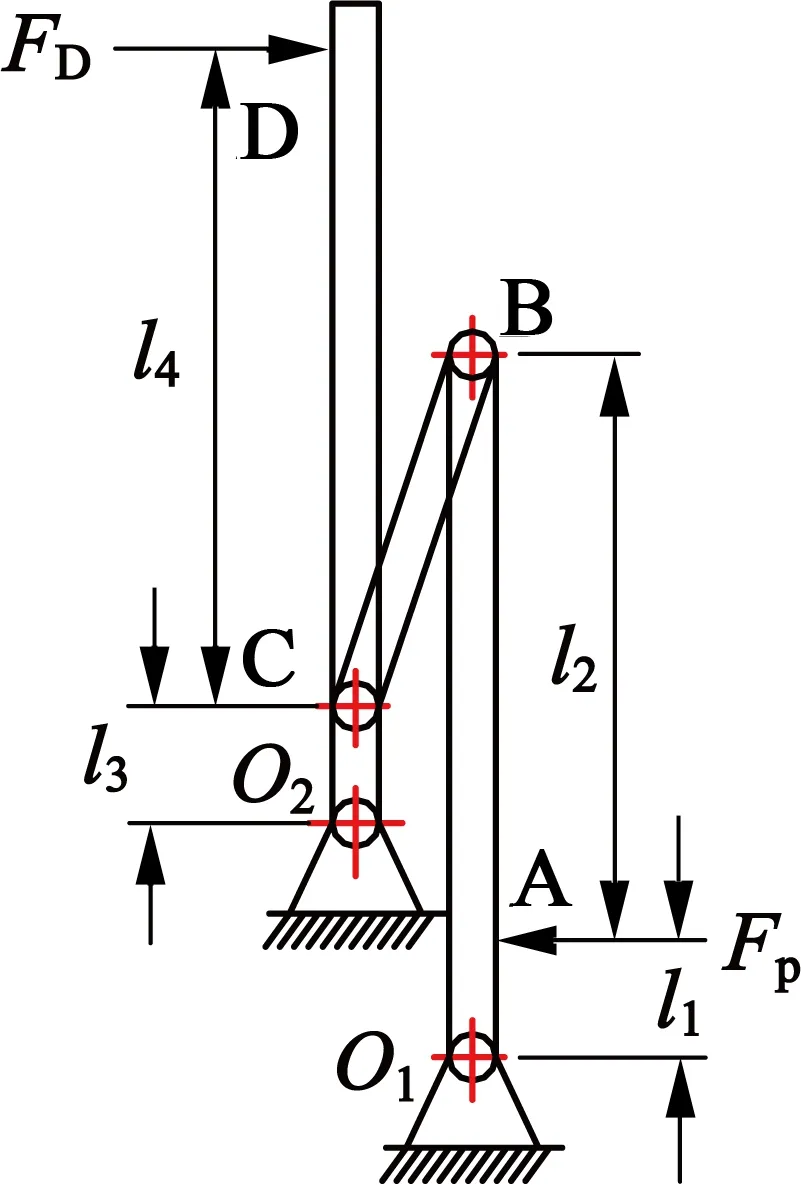
图4 放大结构计算图
放大机构B点位移:
由于压电叠堆输出位移为微米级,故C点的位移与B点位移近似相等,则D点的位移:
活齿受力如图5所示。活齿受到中心轮、激波器和转子的作用力分别为FCj,FHj和FSj,根据图5分别对活齿沿x和y方向列平衡方程得:
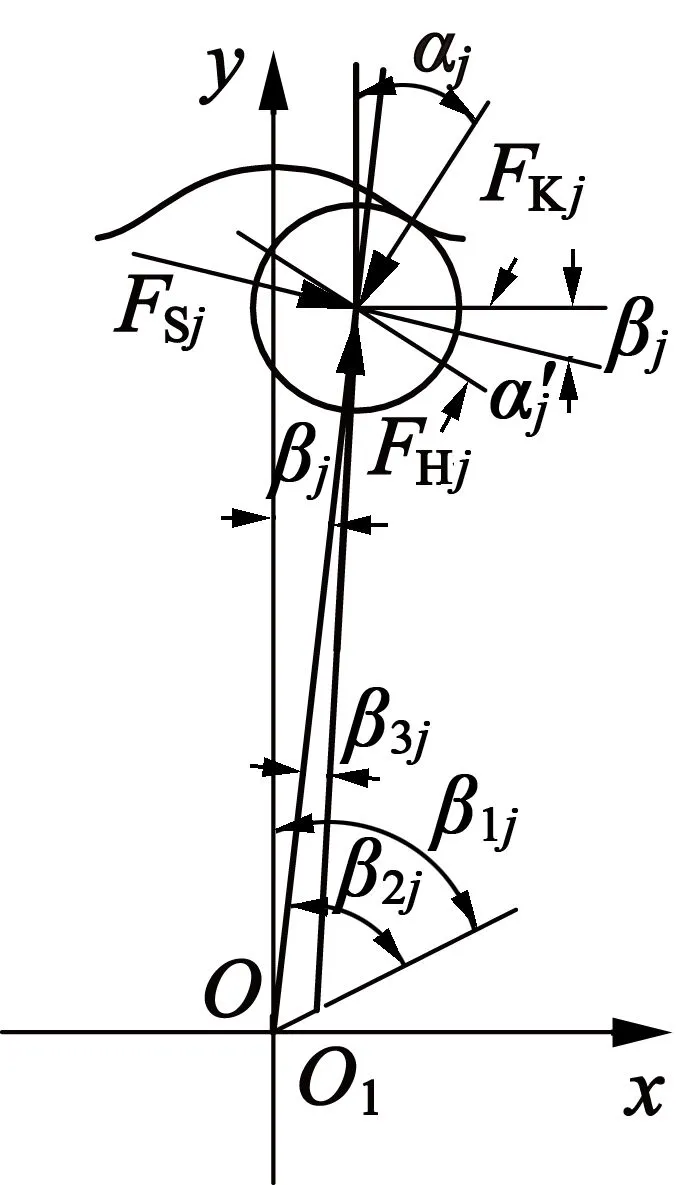
图5 活齿受力图
式中:αj为活齿运动轨迹与x轴夹角。
活齿系统中各参与啮合活齿受力为FHj,各力的合力为FD,由此可得:
式中:θHj为FHj与x轴的夹角。
联立式(9)和式(10)可得活齿受力。
3 算例分析
电机系统参数如表1所示,将参数代入式(6)

表1 系统参数
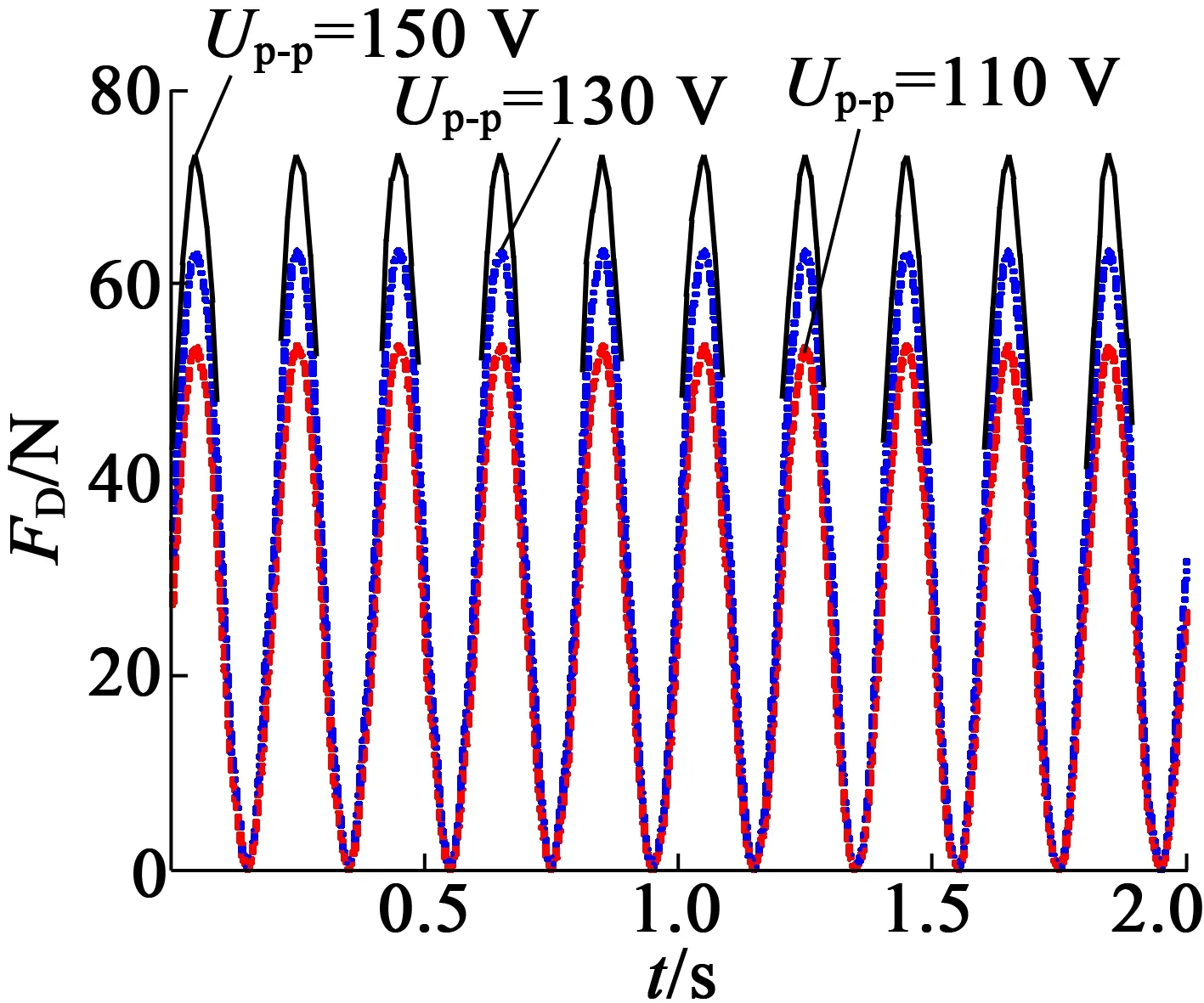
和式(8),可得谐波力和位移随电压和时间的变化,如图6和图7所示。由图6、图7可知:

(a) 谐波力FD

(b) 谐波位移δD
(a) 谐波力FD

(b) 谐波位移δD
谐波力和位移随电压Up-p的增加而增加,在Up-p=150V时,最大谐波力为73.3N,最大谐波位移为2.42mm,由于激波器偏心距为0.3mm,故系统产生的谐波足以驱动电机工作。
谐波力和位移随时间成正弦变化,不同激励电压Up-p时,谐波力和位移的波形保持不变。
根据式(9)和式(10)求得活齿受到的作用力随转角的变化,如图8所示。由图8可知:

(a) 中心轮作用力FKj

(b) 激波器作用力FHj

(c) 转子作用力FSj
随着电压Up-p的增加,活齿受到中心轮、激波器和转子的最大作用力均增加。
当激励电压Up-p恒定时,中心轮作用力最大,转子作用力最小,中心轮作用力是转子作用力的1.97倍。
4 结 语
本文研究了一种基于连杆放大机构的旋转压电微电动机,给出了电动机的工作原理,对电动机进行了结构设计和力学计算,分析了电动机的谐波输出特性和活齿受力状况。结果表明:
1) 系统产生的谐波位移足以驱动电动机连续转动工作;
2) 活齿受到中心轮的作用力最大,是转子作用力的1.97倍。
本文的研究结果为基于连杆放大机构的旋转压电微电动机的改进和性能提高奠定了理论基础。
