基于应变全桥的铁质悬臂梁传感器的设计与实现
2018-08-08张玉叶
张玉叶
(咸阳师范学院物理与电子工程学院,陕西咸阳712000)
近年来,小型悬臂梁传感器由于灵敏度高,体积小、易于阵列化等优点引起广泛关注。悬臂梁称重传感器,通常梁的一端为不产生轴向、垂直位移和转动的固定支座,另一端为自由端。水平固定传感器安装端,然后悬臂梁末端施力,桥阻发生变化,通过输出信号算出传感器的称重值。常见的密封结构,受力后自动调节,安装容易,使用方便,互换性好[1]。量程大,可用于制作各种超薄型电子汽车衡、单轨吊秤、电子秤等。
1 传感器的设计及制作
电阻应变式称重传感器的原理为:悬臂梁在外力作用下产生弹性变形,使粘贴在它表面的电阻应变片也随同产生变形,电阻应变片变形后,它的阻值将发生变化,再经相应的测量电路把这一电阻变化转换为电信号,从而完成了将外力变换为电信号的过程。由此可见,电阻应变片、悬臂梁和检测电路是电阻应变式称重传感器中不可缺少的几个主要部分。
1.1 电阻应变片
电阻应变片[2]是把一根电阻丝机械地分布在一块有机材料制成的基底上,即成为一片应变片,外形如图1所示。电阻应变式称重传感器作为物体质量信号与电信号的转换器,将4个应变片粘贴在铁质悬臂梁的上下两侧,组成差动全桥称重传感器[3],工作原理如图2所示。

图1 电阻应变片

图2 电阻应变式全桥传感器原理图
图2中,惠斯通电桥的输出电压为:

式(1)中,Uin为电桥电源电压,当称重传感器不承受载荷时,铁质悬臂梁不产生形变,粘贴在其上的电阻应变片不产生形变,R1=R2=R3=R4,电桥输出电压为零。相反,当传感器承受载荷时,粘贴在铁质悬臂梁上端的应变片被拉伸,阻值增大,粘贴在铁质悬臂梁下端的应变片被压缩,阻值减少,经过相应的测量电路将电阻的变化转换为电信号,完成将外力变换为电信号的过程,各桥臂的电阻值变化分别为 ΔR1、ΔR2、ΔR3和 ΔR4时,近似求出电桥的输出电压的值为:

桥路输出变化量反映了压力的变化。
1.2 铁质悬臂梁
铁质悬臂梁的作用有两个,首先是它承受称重传感器所受的外力,对外力产生反作用力,达到相对静平衡;其次,它要产生一个高品质的应变场,使粘贴在此区的电阻应变片完成应变电信号的转换任务。常见的悬臂梁传感多为硬铝合金四方块结构,其外观上有两个孔洞。因为铝的硬度不够,通常都做了四角修正,并且在测量表面应力时,悬臂梁的应力分布不仅沿着梁的长度方向分布,同时也包括横向应力,因此把这种常见的悬臂梁传感器视为二维结构,因此构件的形状和应变片的粘贴位置对传感器的灵敏度影响很大[4-5]。此外,它的缺点是对于大应变有较大的非线性、输出信号较弱。鉴于此,在实验室自制一款铁质悬臂梁电阻应变式称重传感器,平衡梁式的传感器内部结构与铝质平衡梁相似,厚度比铝质的传感器小很多,从结构上被视为一维结构,应力分布均匀,如图4所示。
1.3 检测电路
检测电路采用全桥式等臂电桥把电阻应变片的电阻变化转变为电压输出。在铁质悬臂梁上下各粘贴两个电阻应变片,基于惠斯通电桥原理进行电路连接形成差分式称重传感器,连接方式如图3所示。
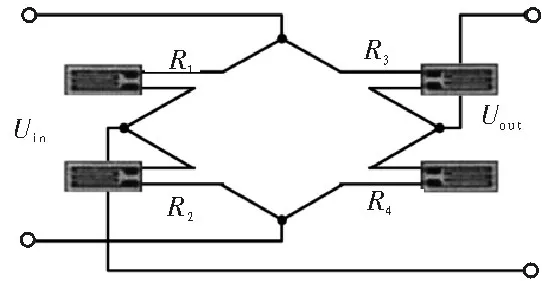
图3 全桥式称重传感器连接
实验室选用的铁质悬臂梁作为弹性体,在粘贴应变片[6]形成传感器的过程中按照以下步骤进行:
1)首先进行表面磨平,并用细砂布磨光以增强粘结力,打磨完毕后,用洁净棉纱擦洗干净,用划针划出贴片的准确方位;
2)在贴片位置滴502胶,将胶水涂匀,然后用镊子拨动应变计,调整位置和角度。用手指轻轻挤压出多余的胶水和气泡固化后即可松开;
3)粘结剂初步固化后可进行焊线。应变计和导线间的连接最好通过接线端子,焊点确保无虚焊。制作的铁质悬臂梁称重传感器实物成品如图4所示。

图4 自制铁质悬臂梁称重传感器
导线最好与试件绑扎固定,导线两端根据测点编号作标记,方便后续信号处理。
2 精密电子秤实验装置的制作
实验室制作铁质悬臂梁称重传感器后,外围搭建辅助电路可制作一款简易而精密的电子秤系统。该系统以STC12C5A60S2单片机[7]为核心,将传感器输出模拟信号经过24位A/D模数转换芯片HX711,对被测信号进行放大且转换为数字信号。
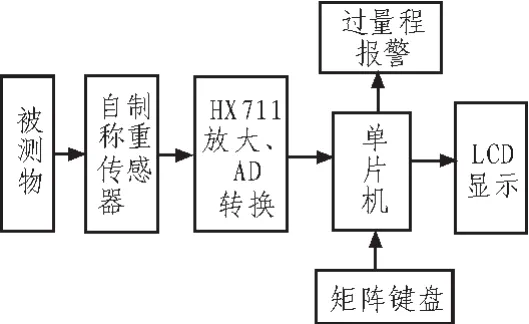
图5 基于铁质悬臂梁的电子秤系统框图
再利用LCD12864液晶显示物体重量,用矩阵键盘对单片机内部的数据设定,使电子称实现称重计价的功能,结构框图如图5所示。
2.1 HX711AD转换模块
称重传感器的输出为mV级的微弱信号,传统的测量方法是在AD转换之前加一级高精度的放大器,电路复杂。本系统的AD转换部分采用美国Analog Devices公司推出的高精度24位转换芯片HX711[8-9]。该器件具有完整的模拟前端,可以直接测量传感器输出的微弱信号,转换精度达到24位无误码。通过软件编程可以对增益、信号极性、输入通道作出设置。该芯片内部输入通道和增益选择如表1所示。

表1 HX711输入通道和增益选择
2.2 控制模块及软件处理
单片机作为控制核心,主要功能是接收AD转换的结果,反算实际被测物的质量。首先悬臂梁一侧逐渐添加称重砝码,一边记录称重砝码的质量,一边记录AD转换的结果,试图求出AD转换结果和被测物体重量之间的关系,编写该电子秤的输出函数,当实测50 g范围内砝码值和AD转换数据的关系曲线如图6所示。
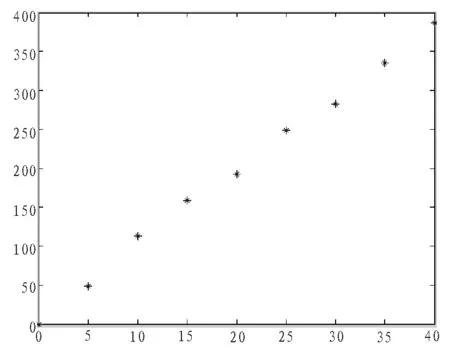
图6 砝码质量与AD转换关系曲线
用MATLAB软件对该组数据进行拟合[10-12],从而求出被测砝码重量(单位:克)与HX711输出AD数据函数关系为:

(3)式中,y为被测物体的实际重量(单位:克),x为LCD12864实时显示数据。为确保称重精度,在用MATLAB处理数据[13]时采取分段处理,在称重0~50 g、50~200 g、200~500 g的范围内分别求取拟合系数,这样反算出的实际重量精确度高。程序采用C语言编写,编译环境使用keil UV3软件,总体流程如图7所示。

图7 系统总流程图
该系统可实现称重功能,累加功能和去皮功能也得到了实现。
3 系统测试与分析
3.1 实验测试
整个系统由电阻应变式称重传感器模块、放大及AD转换模块、键盘显示模块组成,将各部分电路连接起来,进行整机调试。将被测物体(测试过程中用砝码)放入秤盘测量,一方面记录所加砝码重量值,另一方面记录系统运行的称重结果,系统整体结构如图8所示。

图8 系统整体硬件图
在程序初始化以后,启动称重程序,在秤盘里加砝码,当所加砝码在0~50 g范围内,程序运算的结果在LCD屏显示的数据如表2所示,从表2可以看出,误差在0.5 g范围以内。

表2 0~50 g范围的测量(单位:克)
在测量过程中,秤盘所加砝码在50~500 g范围内,程序运算结果在LCD屏显示结果如表3所示,误差在1 g范围内,系统键盘与显示实时观测如图9所示。
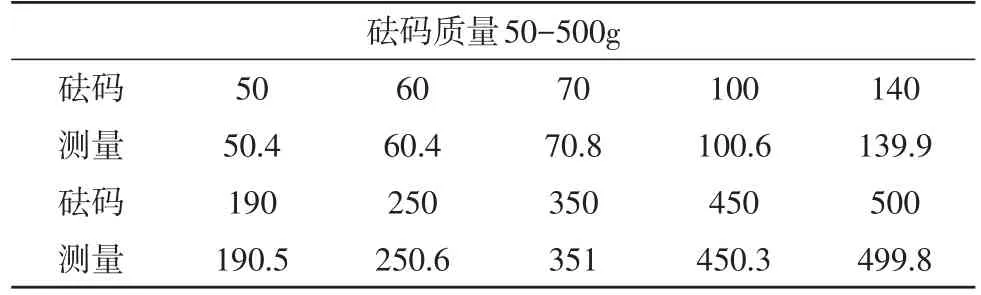
表3 50~500 g范围的测量(单位:克)
3.2 温漂现象与处理

图9 键盘与显示
在电子称实验装置的制作过程中,不可避免的出现温漂漂移现象。温度漂移出现的原因[14-15]经过分析来源于以下方面:
1)在铁质悬臂梁上贴应变片的时候,搭建的电桥没有完全对称,初始化会有差分信号,电桥本身存在一定的缺陷;
2)传感器输出微弱的模拟电压信号,在HX711运放应用中,不可避免回到运放输入失调电压Vos问题,因失调电压Vos的存在,它会随着温度的变化而变化,放大电路输出端总会叠加我们不期望的误差。
经过分析,处理温度漂移的常用方法是测试分析硬件电路,一方面从IC本身参数着手,由于运放的输入失调电压来源于运放差分输入级两个管子的不匹配,所以,从工艺上来讲,选用精度高的、对称性好的运放,这个是要考虑成本的。另外就是搭建仪表放大电路[16],让电路尽量对称,电路的失调相互抵消从而抵制温漂,其缺点也是要对元器件的选择非常慎重。考虑到应变式传感器与重量之间的非线性关系,要达到标称精度就有难度了。
然而,本设计采用分段式记录系统AD转换数据与所加砝码的质量,用MATLAB软件在不用的称重范围,做拟合曲线,找出二者关系,用不用的拟合系数表达实际砝码与AD转换的关系。在单片机的程序编写中只需要修改关系式的系数就可有效补偿温度漂移。这样,当发生温漂的时候,测量部分数据,修改拟合系数即可。这样减少了系统硬件投入。效果测试的比较好。缺点是当发生温度漂移时,需要重新测量数据,重新拟合数据,找出拟合系数,重新下载程序。
4 结论
小型悬臂梁传感器的应用面越来越广,经过理论分析,在实验室自制一款电阻应变式铁质悬臂梁称重传感器,并通过搭建辅助的硬件外围电路自制了简易电子秤。充分利用了STC12C5A60S2单片机对信号的控制能力和对数据的分析处理能力。MATLAB对数据进行分段拟合,根据实际情况调整拟合系数,克服温度漂移带来的误差,整个系统结构紧凑、硬件开销小、成本低,并且系统有进一步改善优化空间。
