基于DMC-PID串级控制的超临界机组给水系统研究
2018-08-07马永光毛求福
马永光, 毛求福
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引言
随着我国电力行业的迅猛发展,火力发电机组承担着主要用电量供应任务,如何保证火电机组稳定、安全、高效地运行一直是电力行业研究的重点。
超临界发电技术比较成熟,并且具有热效率高、可靠性强、环保、调峰性能好等优势,是我国目前火力发电技术主要的发展方向,并逐步成为电网的主力机组[1,2]。给水控制系统作为超临界机组控制系统中非常重要的子系统,其控制方案是以中间点温度或者焓值作为反馈信号,保证燃水比不变,进而控制汽温,以满足不同负荷下对给水量的要求[3]。传统的PID控制器结构简单、稳定性好、应用成本低,在电厂中有着广泛的用。但是该方法要求被控对象有精确的模型,而在实际运行过程中,给水控制过程的复杂性和不确定性使得PID控制难以达到满意的控制效果[4]。
给水控制系统的数学模型不仅具有较大的纯滞后,而且其数学模型的参数会随现场机组工况的改变而发生变化,因而对给水控制系统的设计不仅要满足跟踪性能好,还要达到其对控制对象数学模型变化具有较强的自适应能力的要求[5]。对此,本文采用对模型要求低、跟踪性能好、消除扰动能力强的动态矩阵控制算法[6]构建超临界机组给水串级控制系统,将DMC控制器作为给水串级控制系统的外回路控制器,内回路控制器仍采用传统的PID控制器,改善了调节给水流量信号的大延迟特性,提高了给水串级控制系统的稳定性、鲁棒性和抗干扰性。
1 直流锅炉给水控制系统概况
目前,超临界机组多采用直流锅炉,与汽包锅炉有所不同,直流锅炉的给水一次性经过加热、蒸发和过热段,各段之间没有固定的界线,其汽水流程示意图如图1所示。
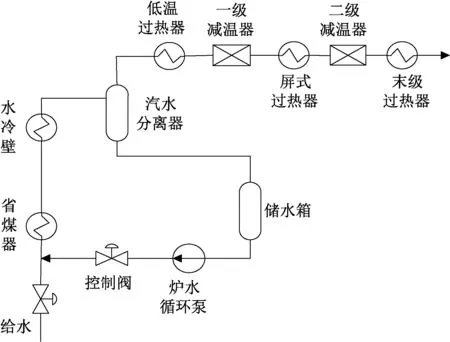
图1 超临界机组直流锅炉汽水流程示意图
在正常运行工况下,机组负荷一般不低于本生负荷(30%额定负荷),基本处于直流运行阶段,给水控制系统的主要任务是在不同负荷阶段保证合适的燃水比,以控制过热器出口温度,实现过热汽温的粗调[7]。由于过热汽温对给水扰动有很大的延迟,难以保证过热汽温的调节品质,因而一般采用汽水分离器出口蒸汽温度作为中间点温度来反映燃水比[8]。本文研究的350 MW超临界机组给水系统采用中间点温度作为燃水比的校正信号,其简化原理结构图如图2所示。
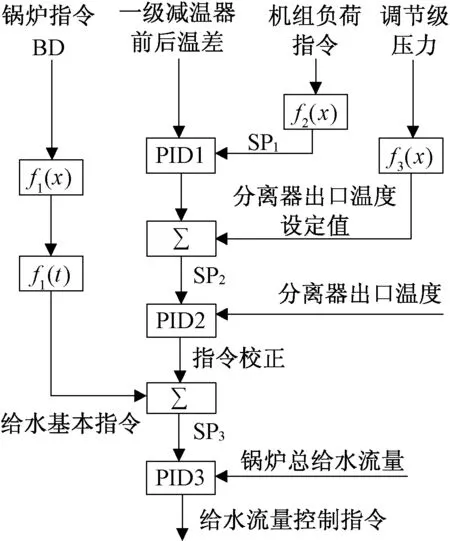
图2 采用中间点温度信号的给水控制方案
对图2经过分析简化可得基于中间点温度的串级给水控制系统,其中主回路为中间点温度控制回路,副回路为给水流量控制回路,其简化原理图如图3所示。
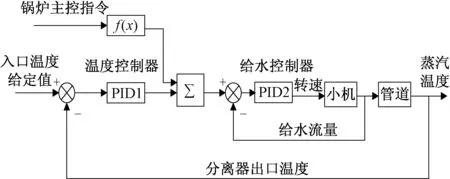
图3 基于中间点温度的串级给水系统原理图
2 DMC算法原理及控制器设计
2.1 DMC算法原理
动态矩阵控制(DMC)算法是针对系统复杂化和不确定性逐渐发展起来的一种预测控制算法。该算法是基于对象阶跃响应的预测控制算法,适应于渐进稳定的系统,且具有计算量较少,鲁棒性强等优点,在工业过程中应用最为广泛[9]。动态矩阵控制算法包括预测模型、滚动优化和反馈校正3个部分[10],其算法基本结构如图4所示。
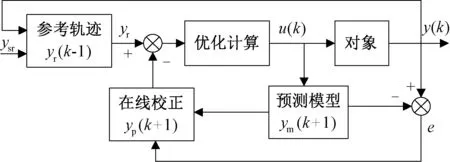
图4 预测控制算法基本结构图
动态矩阵控制算法采用被控对象的单位阶跃响应数据序列作为基本的预测模型。本文研究的超临界机组给水系统是有自衡的,即当系统稳定以后,被控系统的输出会基本保持不变。假设从时间t=0开始采集的中间点焓值单位阶跃响应的数据,经过N个采样周期,系统已经进入稳态,所获得的N个数据可以记为{a1,a2,…,aN},如果在k时刻的控制增量为Δu(k),则未来N个时刻的输出值为:
Δu(k)
(1)

Δu(k+j-1)
(2)

Δu2(k+j-1)
(3)
式中:qi、rj是权系数,它们分别表示对跟踪误差以及控制量变化的抑制程度。
由于在实际中有模型失配、环境干扰等未知因素的存在,预测值有可能偏离实际值,此时需要利用实时信息进行反馈校正,即可采用对输出误差e(k+1)加权的方式修正对未来输出的预测。
(4)
2.2 DMC-PID串级控制器设计
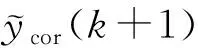
根据基于中间点温度的串级给水系统原理图可知,在传统的串级控制系统中,主回路和副回路均采用PID控制器。为改善系统的调节品质,将主回路控制器改为DMC控制器,副回路仍采用PID控制器,即形成DMC-PID串级控制器,其基本原理图如图5所示。
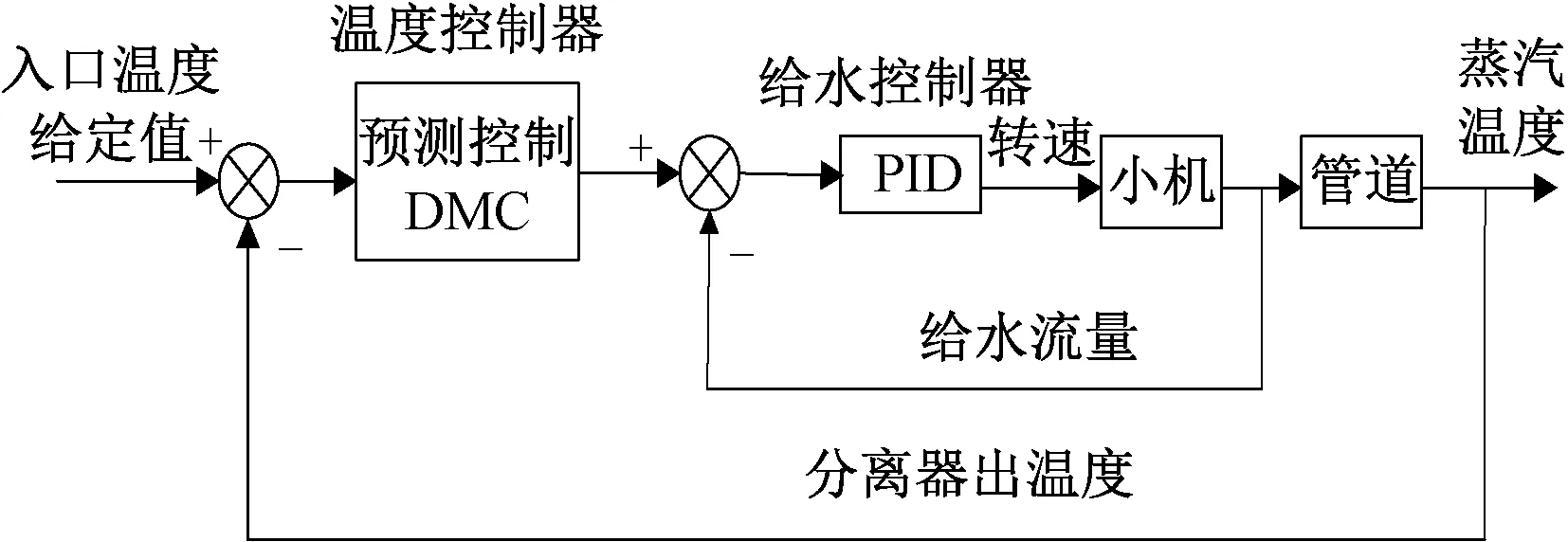
图5 基于DMC-PID的串级给水系统原理图
PID控制器作为一种常规控制器,其控制器参数的整定原则不再赘述。下面重点研究DMC控制器的参数选取原则[11]。根据动态矩阵控制算法原理,需要选取的控制器参数主要有:采样周期Ts、序列长度N、预测长度P、控制时域长度M、加权系数矩阵H和R、预测误差加权修正系数C。
(1)采样周期Ts的选取
(2)序列长度N和预测长度P
对于预测控制算法来说,动态矩阵的建立来源于被控对象的单位阶跃响应曲线,即动态矩阵仅与阶跃响应序列有关,所以无论N取多大,动态矩阵只与前P个响应数据有关,如果决定了N的取值,取P=N即可。
(3)控制时域长度M
M表示所要确定的未来施加的控制增量个数,因而可选M≤P。但若M选取过小,难以保证系统的未来输出能紧密跟踪希望值;若M选取过大,会使系统的稳定性和鲁棒性都变差。
(4)加权系数矩阵H和R
误差加权矩阵系数hi表示从(k+1)Ts时刻起到(k+P)Ts时刻止,各时刻预测偏差所占的比重,假定预测偏差所占比重相同,记为c1;而控制加权矩阵系数ri表示未来M个控制量各自所占比重,同样假定预测控制量所占比重相同,记为c2。由于c1和c2共同决定DMC控制器输出幅值的大小,因而都与被控对象的增益K有关。对于c1来说,K越大,c1应该越小;对于c2来说,随着K的增大,c2应该有所增大。
(5)预测误差加权修正系数C
预测误差加权修正系数ci是根据当前的预测误差来进行修正未来的预测输出值,并且ci=ci-1+α(i=2,3,…,P),需要选取的参数为α,当α增大时,控制作用更加平缓。
3 蚁群算法原理及辨识对象模型
3.1 蚁群算法原理分析
蚁群优化算法是一种通过人工模拟蚂蚁搜索食物的过程,即通过每个个体之间的信息交流与相互协作最终找到从蚁穴到食物的最佳路径的寻优方法[12]。其基本流程图如图6所示。
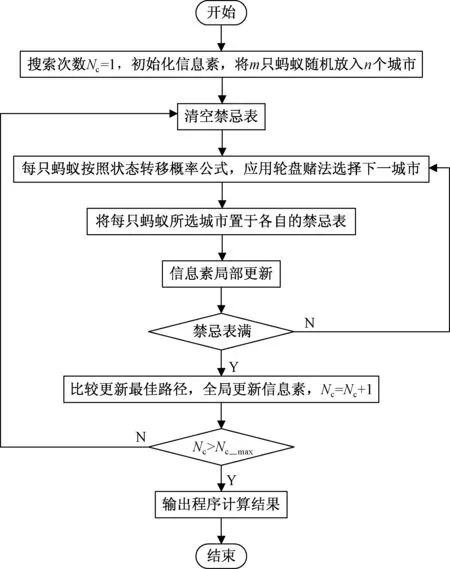
图6 蚁群优化算法基本流程图
鉴于该优化算法具有较强的鲁棒性、寻找路径的并行性以及易于与其他算法相结合的优越性,经过近年的发展和不断深入研究,已经在连续域函数优化方面得到较好的应用。在控制系统对象模型辨识以及控制器参数优化方面,很多学者也提出了不同的方法。本文针对DMC-PID串级给水控制系统,运用蚁群算法对给水系统模型进行辨识,并对DMC控制器参数和PID控制器参数进行优化。
为了获得较好的过渡过程动态特性,可以选取误差绝对值时间积分性能指标作为参数选择的最小目标函数。为了防止控制器输出过大,在所选取的最小目标函数中加入控制量的平方项,即为:

(5)
式中:e(t)为系统误差;u(t)为控制器输出;w1、w2为权值。
3.2 辨识给水系统对象模型
本文以某电厂350 MW超临界机组为研究对象,选用60%负荷工况下的现场运行数据,采用蚁群算法进行系统辨识,建立给水控制系统的传递函数模型。具体的操作步骤如下:
(1)数据预处理
由于采取的现场数据都有一定的噪声,为了减少噪声对辨识模型精度的影响,一般对数据进行去零值、去粗大值以及数据平滑等处理,处理结果如图7和图8所示。
图7 现场实测数据曲线
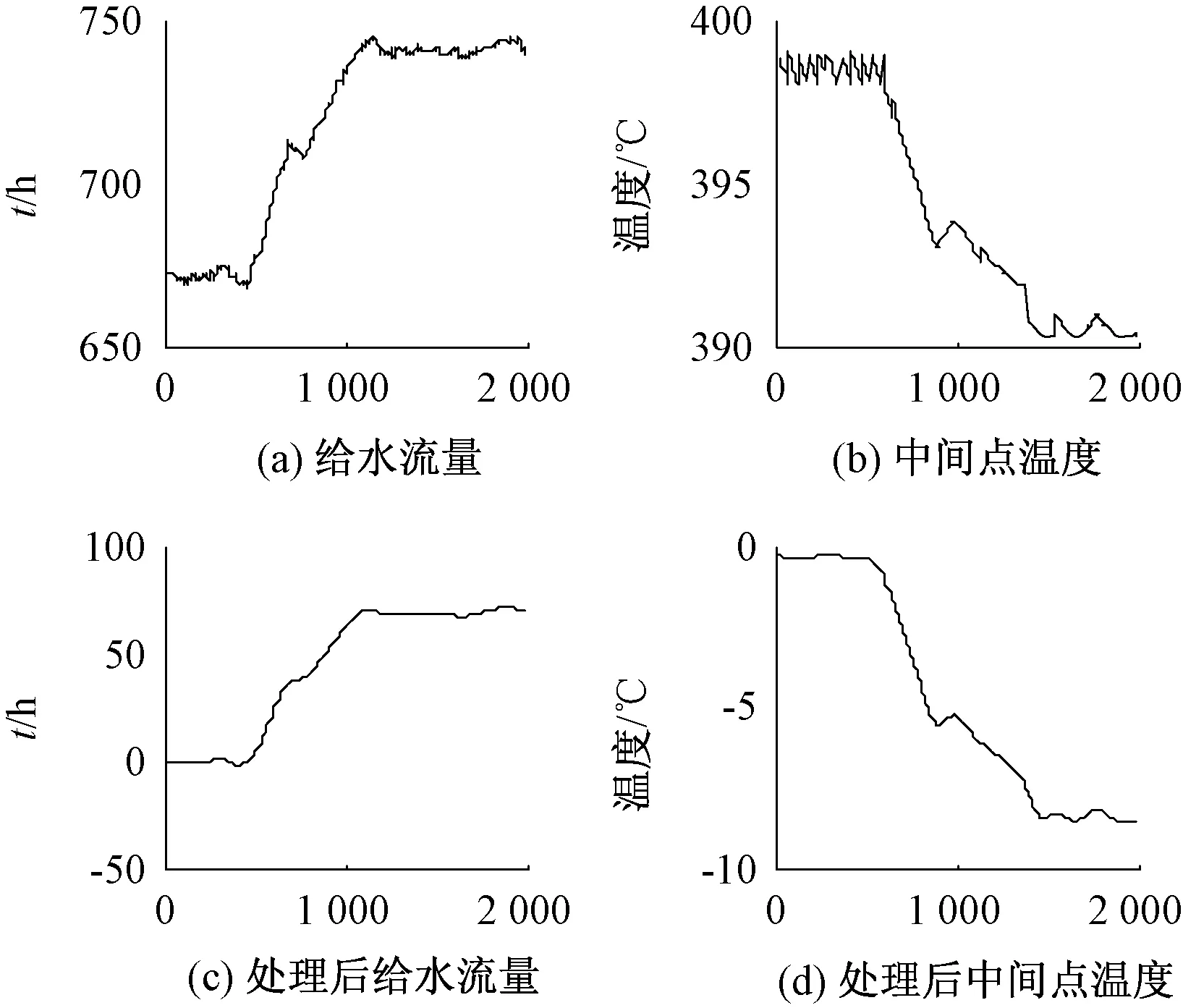
图8 现场实测数据曲线
(2)辨识对象模型
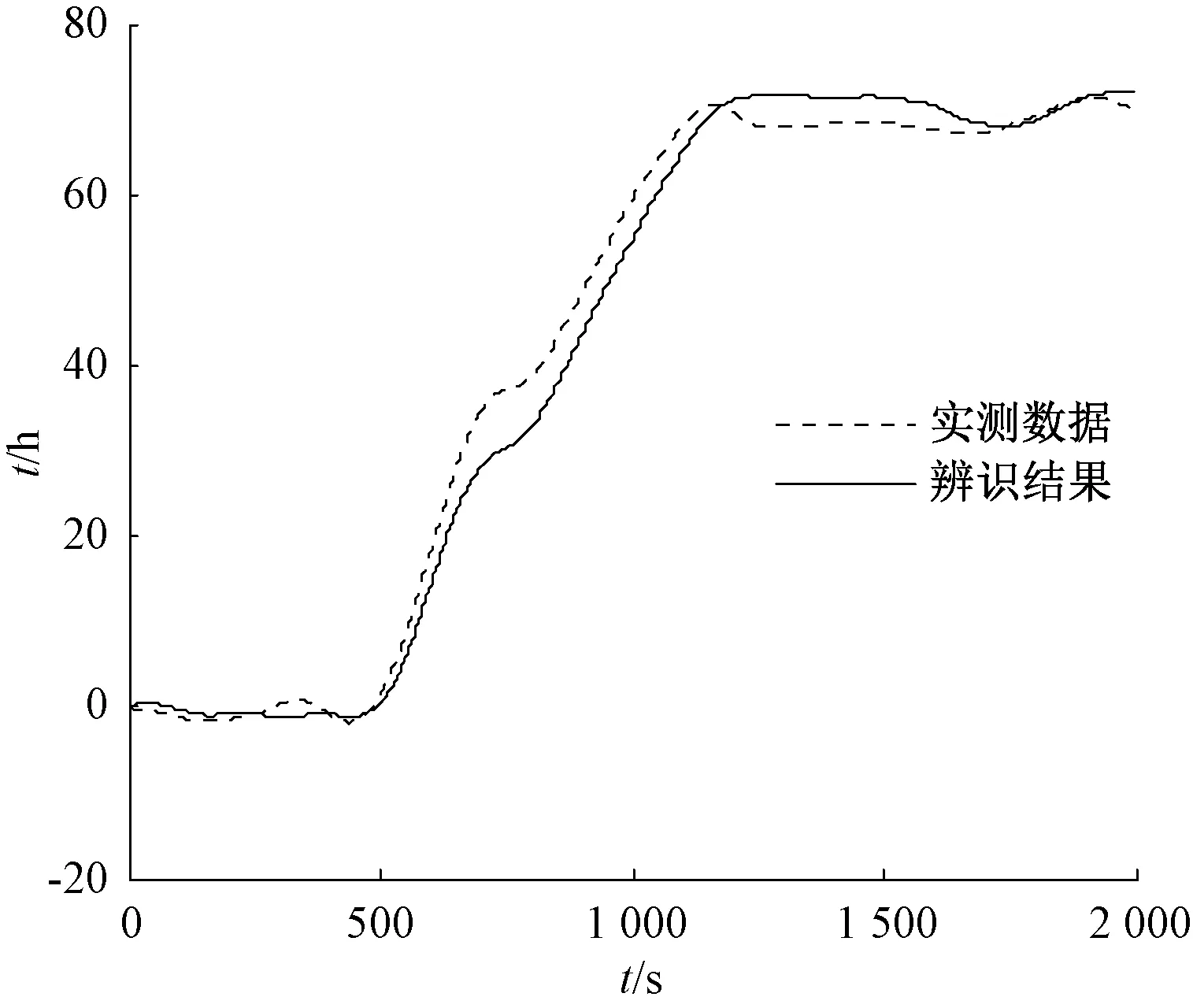
图9 给水流量辨识结果与实测数据对比曲线
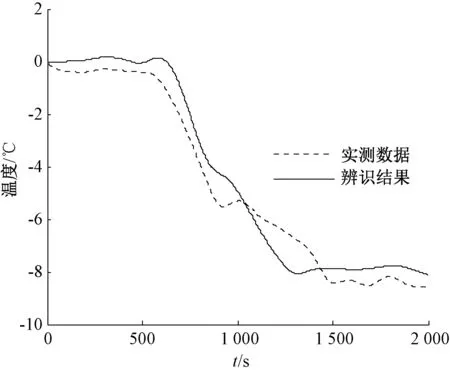
图10 中间点温度辨识结果与实测数据对比曲线
辨识出的传递函数模型为:
4 仿真研究
在本文中主要通过MATLAB编程验证蚁群算法优化的DMC-PID串级控制器与PID控制器的调节性能。下面分别对两种控制算法的仿真试验过程进行讨论。
(1)给水系统的单位阶跃扰动试验
首先,运用蚁群算法优化出常规PID串级控制器参数为:δ1=-1.95、Ti1=9.37、Td1=2.34、δ2=0.64、Ti2=2.8;再对DMC控制器参数优化为:N=29、c1=0.5、c2=0.03、α=2.3。给水系统做单位阶跃扰动试验,仿真时间为2 000 s,仿真结果如图11所示。
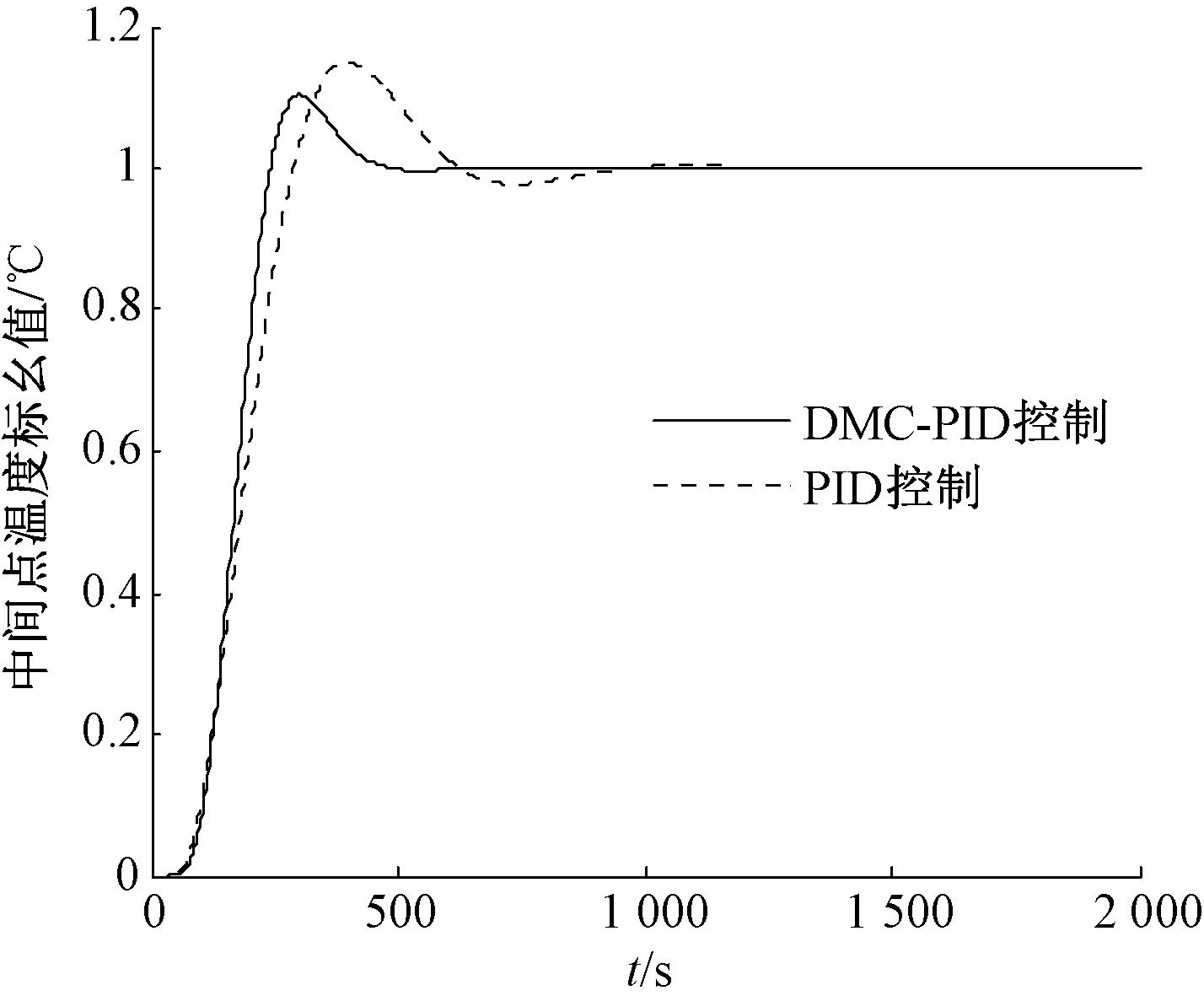
图11 给水系统单位阶跃响应曲线
由仿真结果可知,在给水系统单位阶跃响应下,两种控制方案的动态性能如表1所示。
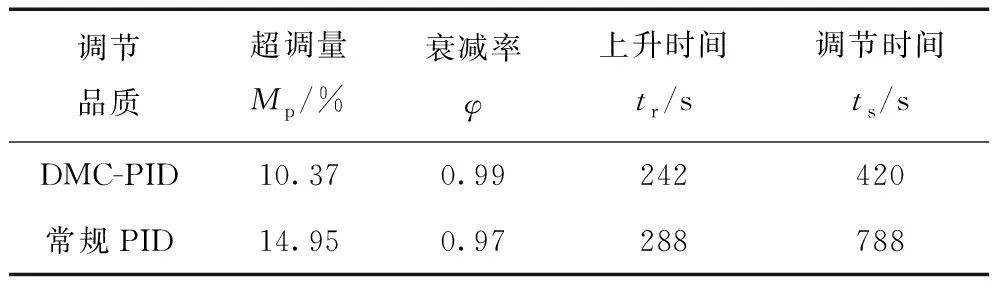
表1 单位阶跃扰动时动态性能对比
由表1可知,在系统单位阶跃扰动下,采用常规PID控制方法时的超调量和调节时间明显比采用DMC-PID控制方法时的要大得多,其他调节品质几乎差不多。综合考虑,DMC-PID控制效果明显优于常规PID控制。
(2)给水系统的鲁棒性试验
在实际过程中,由于建模误差无法避免,机组工况时常发生改变等因素的存在,可能会造成内部扰动,也会影响系统的控制性能。在保持DMC控制器与PID控制器参数不变的情况下,通过单位阶跃扰动试验检验系统的鲁棒性[13]。假设系统发生模型失配,被控对象的参数变化20%时,系统做单位阶跃扰动试验,仿真时间为2 000 s,仿真结果如图12所示。
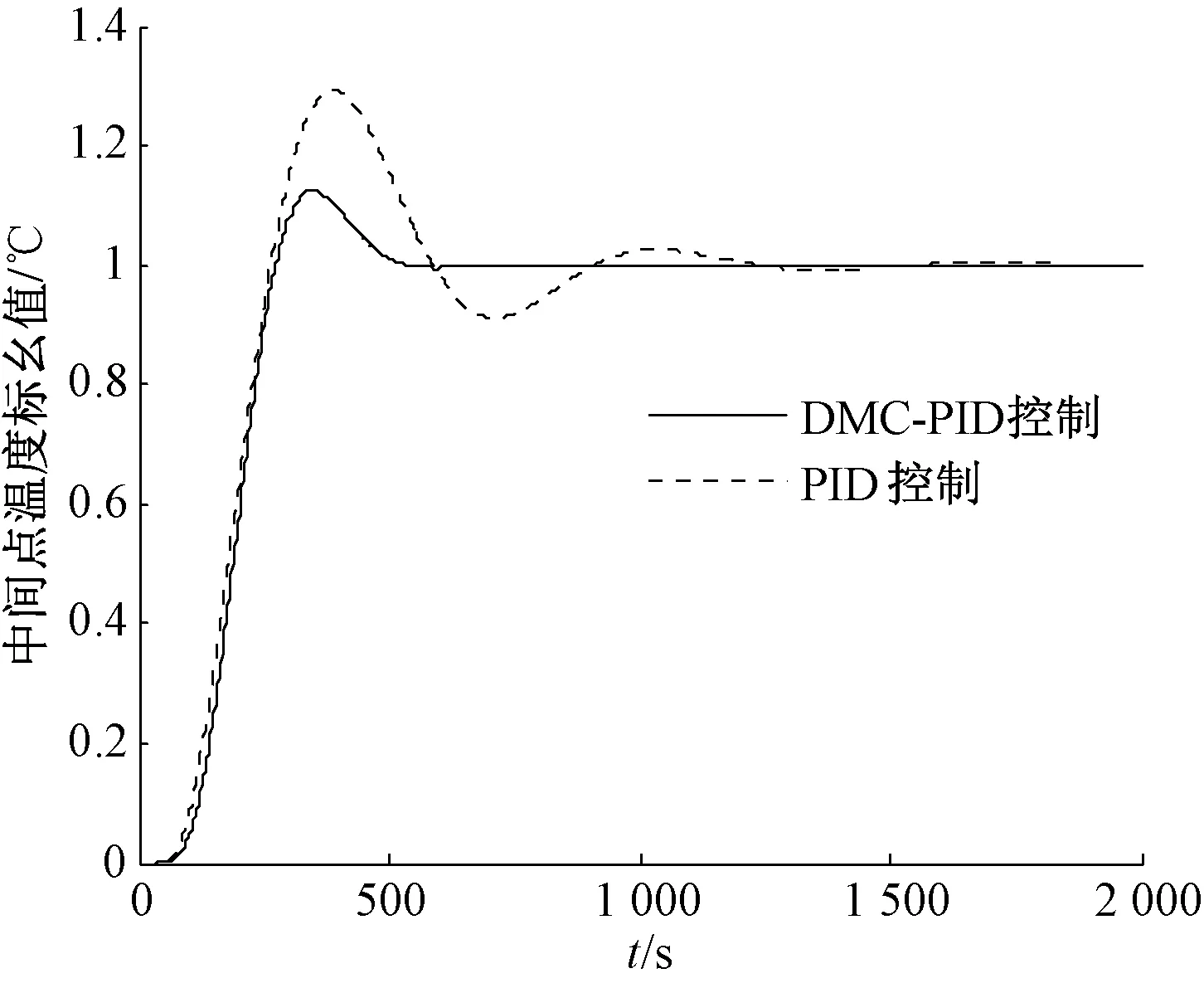
图12 模型失配时系统单位阶跃响应曲线
由仿真结果可知,在给水系统模型失配时的单位阶跃响应下,两种控制方案的动态性能品质如表2所示。
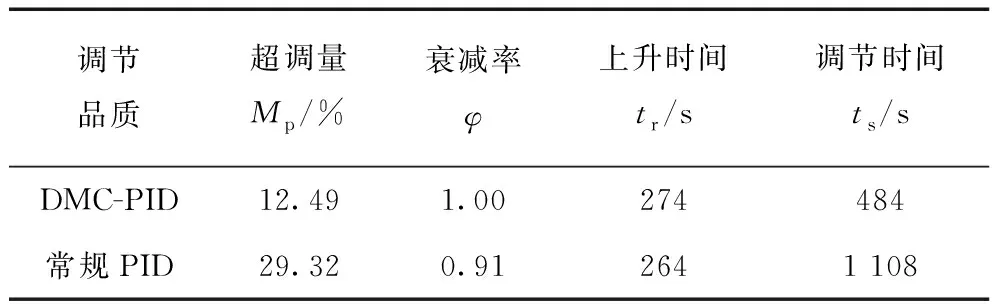
表2 模型失配时动态性能品质对比
由表2可知,由于给水系统复杂多变,系统模型会随负荷发生变化,即当模型失配时,在系统单位阶跃扰动下,当采用常规PID控制方法时,超调量明显增加,振荡加剧,调节时间变长;而采用DMC-PID控制方法时超调量和调节时间都有所增加,相比较而言,调节品质明显比常规PID控制时要好,即采用DMC-PID控制的鲁棒性明显优于常规PID控制。
(3)给水系统的抗干扰性试验
对给水系统进行抗干扰性试验,在给水系统单位阶跃响应试验中,当仿真运行到1 000 s时,在控制器与被控对象之间加入阶跃扰动信号,同时系统做单位阶跃扰动,仿真结果如图13所示。
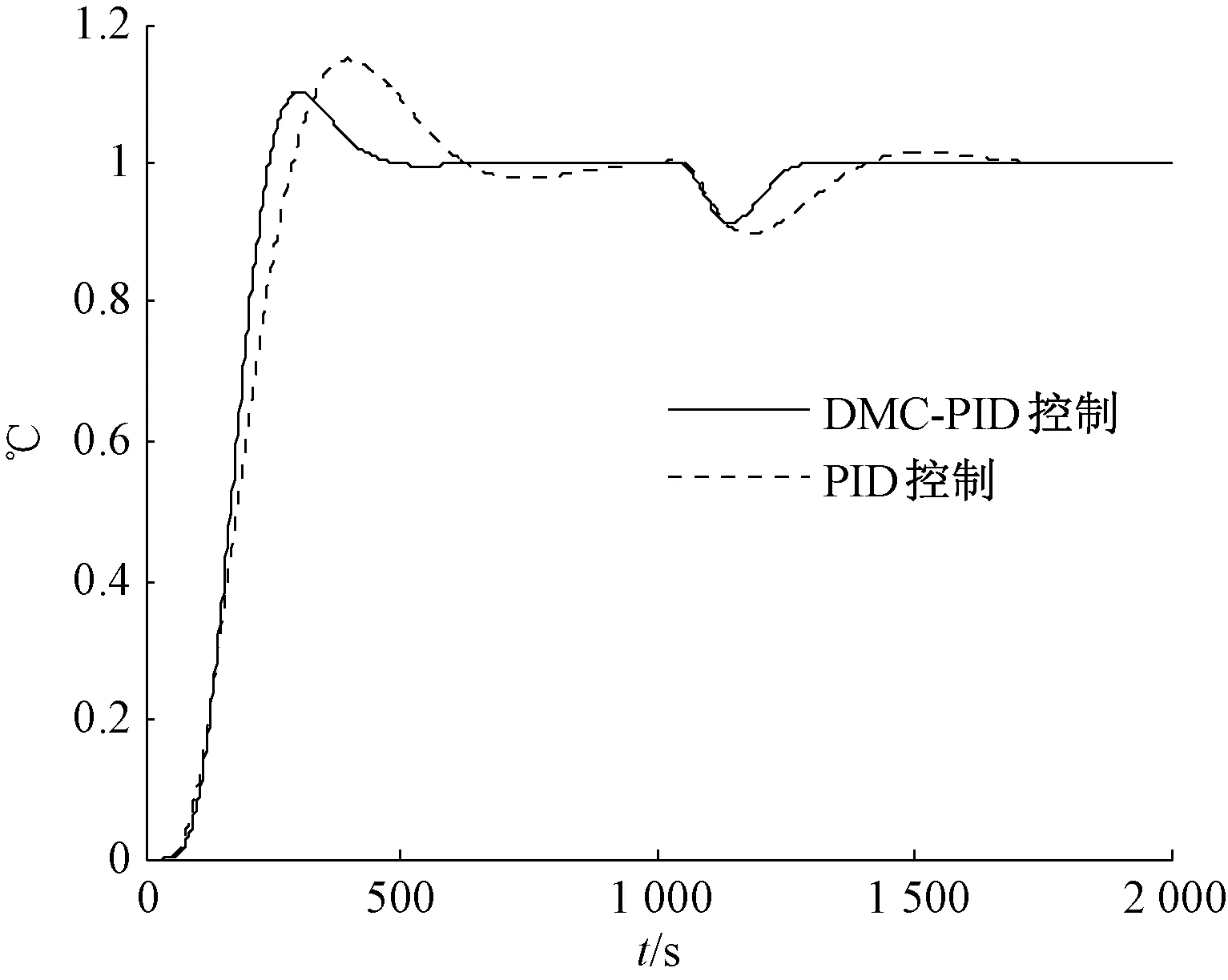
图13 给水系统的抗干扰阶跃响应曲线
在控制器与被控对象之间加入阶跃扰动信号时,两种控制方案的动态性能如表3所示。
由表3可知,在控制器与被控对象之间加入阶跃扰动信号后,由于系统存在大惯性、大迟延的特性,因而系统的超调量和调节时间会增大,但同采用常规PID控制方法相比较,采用DMC-PID控制方法的扰动输出信号消除时间和超调量均要小一些,从总体上来说,DMC-PID控制的抗干扰能力要优于常规PID控制。
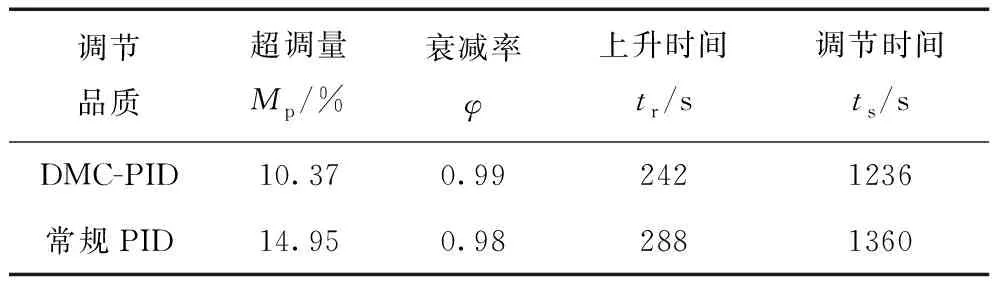
表3 加入干扰信号时动态性能品质对比
通过以上仿真试验可知,本文针对给水控制系统数学模型所设计的DMC-PID控制方案是可行的,能够满足控制要求,并且在稳定性、鲁棒性和抗干扰性方面要优于PID控制方法。
5 结论
本文基于动态矩阵控制理论,针对超临界机组给水系统具有大惯性、大迟延特性且对象参数随工况变化较大等因素,设计了DMC-PID串级控制系统,并将蚁群算法应用于控制器参数的优化。同时,运用350 MW机组现场运行数据建立了给水系统模型,并进行了鲁棒性和抗扰动性检测仿真试验。结果表明,DMC-PID串级控制方法使系统超调量变小、调节时间缩短、稳定性提高,达到了很好的控制效果,且较常规PID串级控制方法有较强的抗干扰能力和更好的鲁棒性,为进一步应用于实际电厂中提供了一定的理论基础。
