基于RecurDyn的高速履带车辆建模
2018-08-07贵州民族大学机械电子工程学院
贵州民族大学机械电子工程学院 张 燕
1 引言
RecurDyn软件有强大的适合各个行业的工具包,其中的履带包Track(LM/HM)是专为履带车辆设计的专业化履带系统工具包,其中有履带板、链轮、驱动轮等组件,用户可以直接调用所需的部件,也可以根据需要自己定义部件形状参数等,可参数化调节各部件的几何形状。
2 车体几何模型
车架的几何模型,可以在RecurDyn中建立,也可采用其他三维软件建立。论文利用UG三维建模软件,建立某全地形车车架的三维模型。车架具体结构对仿真影响不大,因此只建立了车架几何形状的近似模型。在UG软件中将建好的车架模型导出为文本格式(*.x_t)的文件。
3 行走系统建模
在RecurDyn软件的履带子系统Track/HM中,导入车架几何模型,建立车辆行走系统的虚拟模型如图1所示。将导入的车架设为motherbody,可以根据需要对其质量、材质、颜色等特性进行修改。本模型含有两条履带子系统,每条履带子系统包括悬挂系统、1个驱动轮、1个导向轮、6个支重轮、3个拖带轮、87块履带板和1个张紧装置,;驱动轮采用前置方式,驱动轮齿数为10。各零部件的几何参数等根据车辆的实际情况确定。
履带车辆要实现规定的运动,各个零部件之间需要通过约束连接。在RecurDyn中,约束副关系通过Joint来定义。行走系统主要构件之间的约束关系设置如表1所示。

表1 行走系统主要构件约束副关系
3.1 行走系统关键部件建模
在RecurDyn中,驱动轮、支重轮、导向轮、拖带轮的建模方法相同,因此只对驱动轮的建模进行介绍。
驱动轮是履带车辆行走机构的关键部件,履带车辆的前进、后退、转向等都由驱动轮来完成,因此,驱动轮结构的优劣直接影响设备性能及行走机构的使用寿命。驱动轮的齿形,对车辆的仿真有很大影响。本论文根据某型履带车辆的驱动轮,确定了轮齿的结构参数。在RecurDyn的Track/HM子系统中,选择Sprocket建立主动轮,通过设置几何参数,得到驱动轮的结构如图1所示。

图1 驱动轮结构
3.2 张紧装置建模
在经过复杂的路况时,车辆的振动随着地面激励的增加而增大,引起履带、支重轮等部件发生跳动,履带松弛,严重时可能发生脱轮。而张紧装置能够及时调整张紧力,减小履带跳动,避免因地面工况差、较大振动而引起脱轮。

图2 张紧装置
张紧装置的工作原理是:通过移动导向轮来张紧和调整履带的松紧。导向轮与履带直接接触,通过调整与导向轮连接的曲轴的移动,实现履带松紧调节。根据运动形式的不同,张紧装置可分为曲轴型和直线型两种形式。这两种形式的张紧装置,结构都比较简单。本文建立的是曲轴型张紧装置。图2(a)为液压履带张紧调整系统的结构示意图。
在RecurDyn软件中,先建立液压缸系统,再导入到履带行走系统的模型中,对液压缸的运动进行设置。建立张紧装置的曲臂并添加约束,曲臂与履带架旋转铰链连接,导向轮与曲臂旋转铰链连接,液压缸与曲臂旋转铰链连接,液压缸与履带架旋转铰链连接,图2(b)为建立的张紧装置模型。
3.3 履带建模
RecurDyn软件中整条履带模型的建立,是通过先建立履带板,再装配得到的,各履带板之间通过连接销相互连接成一条履带,本文研究的履带车辆的履带为橡胶履带,因此采用单销挂胶履带结构。相互连接的两块履带板之间,通过衬套力相互约束,图3为两履带板连接的示意图。履带与驱动轮、支重轮、导向轮、托带轮直接接触,构成了履带车辆的行走系统。
在高速履带子系统Track(HM)中创建履带板,建立完成后,选择驱动轮、支重轮等完成履带子系统的装配如图4所示。
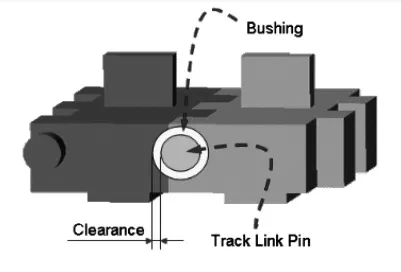
图3 履带板连接示意图

图4 履带板尺寸及履带装配模型
3.4 动力推进简化建模
在履带车辆车辆中,动力系统将驱动力矩通过传动装置传给驱动轮,通过驱动轮的旋转,驱动车辆行驶。本文对履带车辆的传动系统进行了简化,省略了行走系统中传动装置的建模,通过在驱动轮与车体之间添加的旋转副约束上施加速度驱动,实现行走系统的前进、后退、转向等运动,能够对履带行走系统进行精确的仿真及动力学分析。
3.5 悬架系统
本履带系统采用的是独立悬挂悬架系统,并对其进行了数学建模。由于支重轮所受振动的不同,第3、4支重轮处振动较小,采用扭杆悬挂,第1、2、5支重轮受到地面激励影响较大,为了保证车辆运行的平稳性,采用扭杆-油气悬挂系统。因此在RecurDyn中对这两种悬挂系统进行建模。
3.5.1 扭杆弹簧悬架模型
RecurDyn软件中提供了多种柔性连接力,包括弹簧阻尼、扭转弹簧阻尼、Bushing衬套力、beam梁力、Plate力等。与旋转副、固定副等理想铰接相比,考虑了变形,属于柔性连接。RecurDyn中的平移弹簧阻尼(TSDA)和扭转弹簧阻尼(RSDA),可以表示线性和非线性弹簧,可以在其属性表中设置参数。
为保证扭杆承受纯扭转,它的转动端装在平衡肘导管里,用导管承受弯矩,另一端与车体上的履带架连接。因此在平衡轴与车体的转动副上施加转动弹簧,建立扭杆弹簧悬架系统,在属性对话框内,可以设置扭杆弹簧的阻尼特性。
3.5.2 扭杆-油气悬架模型
针对履带行走系统的第1、2、5支重轮处振动大的特点,在这些支重轮处选用了“扭杆+液压减震器”的复合悬架。其结构特点是在原扭杆悬架基础上,又增加了一个液压减震器。它的两端分别与车体、支重轮轮连接。在RecurDyn中建立液压缸子系统来模型液压减震器,建模步骤如下:
(1)选择Subentity建立参数化端点、参数化值、参数化内点;
(2)选择Professional>>Body>>Cylinder建立几何部件(液压缸和活塞杆);
(3)建立液压缸和活塞杆之间的平动副。
确定模型正确后,输出子系统,选择RecurDyn Subsystem file(*.rdsb)。在履带行走系统模型中,导入液压子系统。对液压系统进行编辑,设置液压缸运动。液压缸的上端与车体铰接,液压缸下端与支重轮铰接,确定液压缸安装位置后,在两个铰接处添加旋转副,完成扭杆+液压减震器悬架建模如图5所示。

图5 扭杆-油气悬架模型
3.6 路面模型
路面模型对履带车辆动力学仿真结果有着很大的影响。在RecurDyn软件中,可以自己建立地面模型,也可以通过直接导入RecurDyn中的地面模型文件。建立地面模型的方法有三种,分别是通过轮廓线建立、通过样条曲线建立、通过实体的面建立。
文中采用轮廓法建立路面模型。通过导入RecurDyn中的地面模型文件的方式建立随机路面,通过修改路面文件中的参数,可设置随机工况的路面。
4 结语
利用RecurDyn软件进行动力学仿真,虚拟模型的建立和参数设置决定了仿真结果的准确度。论文所建模型的合理性在后续的仿真过程中得到了验证。论文未对土壤的建模方法进行介绍,在RecurDyn中可以建立硬质、干沙软地面等地面模型,对高速履带工作的不同工况进行仿真。
