永磁同步电机新型变结构直接转矩控制
2018-08-07任凤娟
任凤娟
0 引言
随着永磁材料技术的不断发展和进步,永磁同步电机(permanent magnet synchronous motor,PMSM)由于其具备多种独特的优势而被广泛应用于各种场合[1-5]。目前,对于PMSM控制而言,仍然采用比较成熟的矢量控制策略,且通常要准确地知道被控交流电机的参数。随着电机控制技术的发展,相比于矢量控制,直接转矩控制(Direct Torque Control,DTC)的出现在一定程度上解决了传统矢量控制所存在的缺点[6-8]。然而,传统的DTC技术存在低速时转矩脉动大的问题。为了解决这个问题,近些年来提出了许多新型的直接转矩控制系统,但大部分算法都是用在静止坐标系下[5-7],而对旋转坐标系下的DTC研究较少。本文设计了一种基于新型直接转矩控制的PMSM控制系统,利用滑模变结构控制强鲁棒性特点,将变结构控制与直接转矩控制相结合,设计了一种旋转坐标系下PMSM变结构直接转矩控制系统。最后通过仿真验证了该算法具有较好的动静态性能。
1 永磁同步电机的数学模型
为了便于控制器的设计,首先给出d-q坐标系下PMSM的数学模型为[9-13]:

其中,udq,idq分别为d-q轴的定子电压和定子电流;Ls为定子电感;R为定子电阻;ψf为永磁体磁链;ωe为电机的电角速度。
为了便于控制器的设计,本节介绍一种同步旋转坐标系d-q下的矢量数学模型,表贴式PMSM的数学模型表达式可表示为:

此时,电磁转矩Te的表达式为:

其中,pn为电机的极对数。

2 变结构直接转矩控制器设计
2.1 二阶滑模变结构控制的基本原理
为了不失一般性,考虑单输入单输出非线性系统:

其中,x∈Rn为系统的状态变量,u∈R为系统的控制量,h为输出函数,称为滑模变量。 f、g为光滑的不确定函数。假设系统(6)的相关度为2,则对h(x)进行连续求导有:


成立。则局部坐标[ξ1ξ2]T=[h ḣ]T,可以将二阶滑模控制问题等效为有限时间稳定问题[8]:

根据滑模控制的原理,就是要设计一个滑模控制器,使滑模变量在有限时间内收敛为零。在二阶滑模控制器设计中,采用螺旋算法[14-15]来设计控制器为:

若滑模变量h的一阶导数的上届已知,即:

则kp,ki的值可以通过下式进行调整:

2.2 变结构直接转矩控制器设计
传统DTC中的磁链控制器和转矩控制器通常分别采用滞环调节器,这将会引起转矩脉动问题。为了改善传统DTC的控制性能,本节将设计一种基于螺旋算法的变结构直接转矩控制器,具体设计如下。
首先,为了获得磁链控制器的表达式,定义磁链的滑模面函数:

利用基于螺旋算法的二阶滑摸控制基本原理,此时磁链控制器的表达式为:

其中,kp,ki>0为待设计参数。
假设定子磁链ψr的幅值为一常数,此时电磁转矩Te的微分方程可表示为:

为了获得转矩控制器的表达式,定义转矩的滑模面函数

同样利用基于螺旋算法的二阶滑模控制基本原理,此时转矩控制器的表达式为:

此时,基于螺旋算法的变结构DTC的实现框图如图1所示,此方法是基于旋转坐标系下的控制算法。

图1 变结构直接转矩控制的控制框图
3 仿真与实验验证
采用如图2所示的PMSM调速控制系统进行仿真及实验验证。从图中可以看出,该控制策略主要包括以下几个部分:转速环调节器、磁链和转矩调节器、磁链和转矩的计算和SVPWM算法等。
3.1 仿真结果分析
为了验证文中所提控制算法的正确性,根据图2所示的控制框图搭建系统的仿真模型。电机的参数设置为:定子电感Ls=8.5 mH,定子电阻R=1.2Ω,磁链ψf=0.175 Wb,转动惯量 J=0.000 8 kg·m2,极对数pn=4。其中,仿真条件设置为:参考转速为600 r/min,当t=0.5 s时突加负载转矩TL=1.5 N·m。
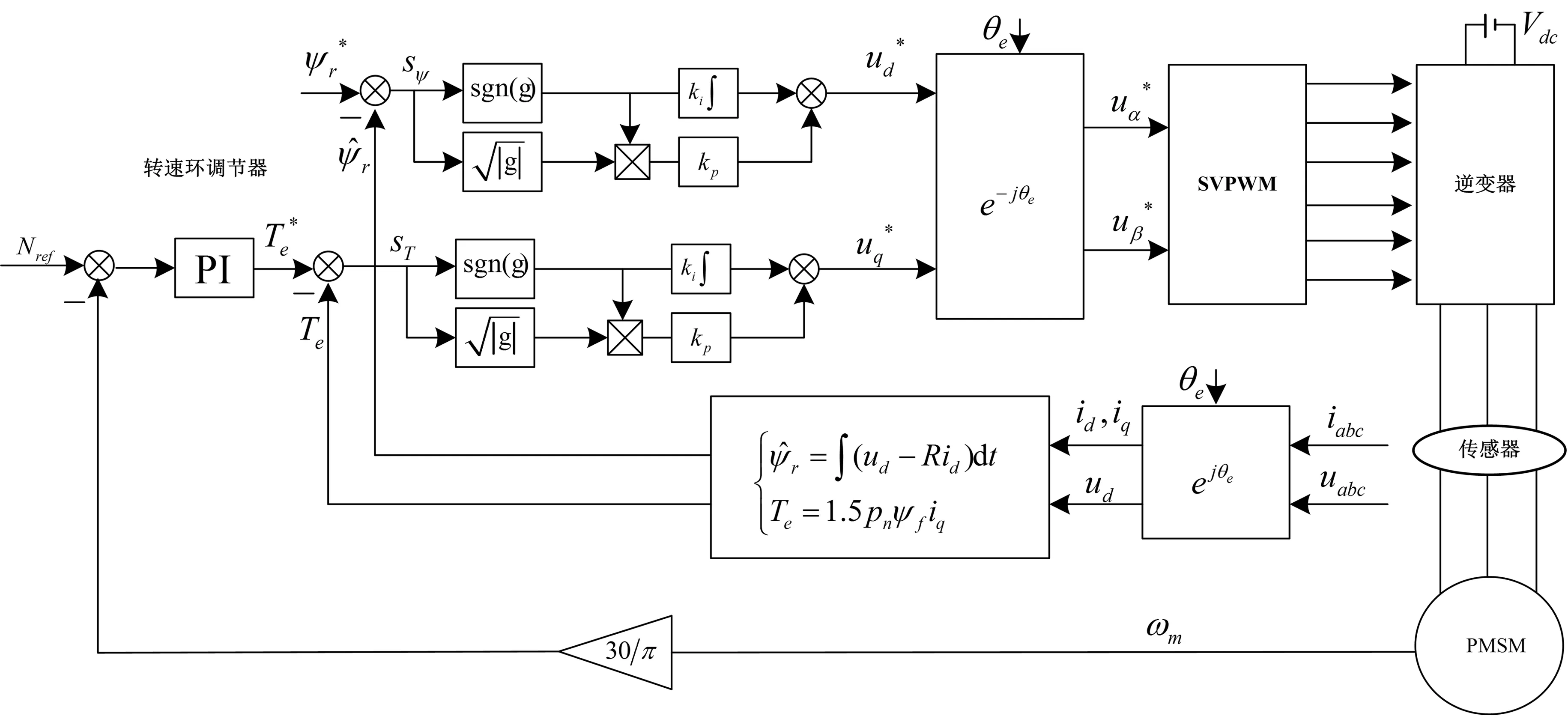
图2 基于螺旋算法的PMSM变结构直接转矩控制框图
为了便于比较分析,仿真中分别对传统DTC控制和文中所提的控制策略进行仿真比较,仿真结果分别如图3和图4所示。
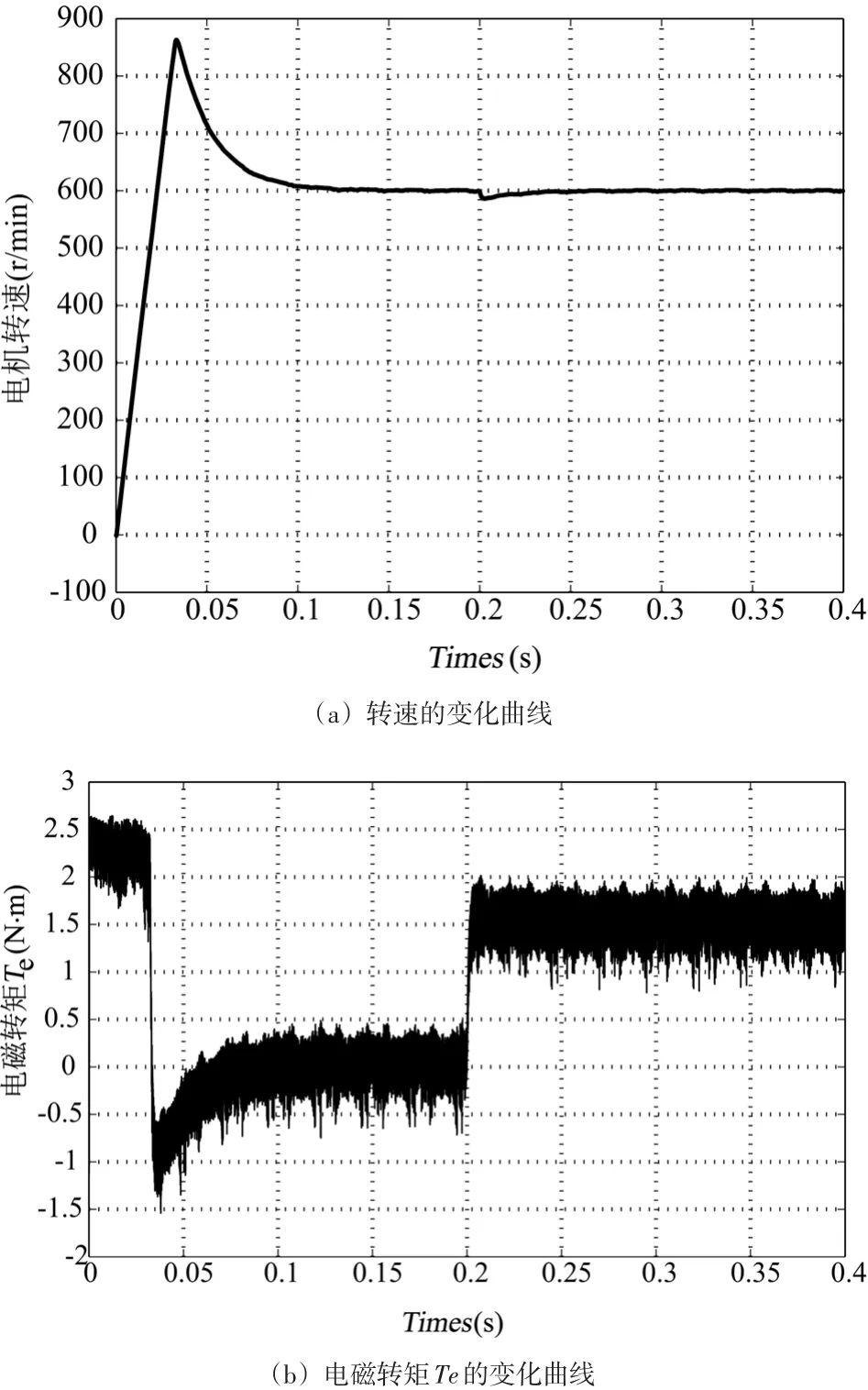

图3 基于传统DTC的仿真结果
从如图3(a)和4(a)可以看出,采用传统DTC时,电机空载启动过程中转速不仅有一定的超调,调节时间较长,约为0.1s;采用文中所提算法时,电机转速虽然有一定的超调量,但调节时间非常短,不到传统DTC控制的一半。另外,当电机突加负载时,文中所提控制算法具有较快的动态响应速度,且电机转速波动也很小,从而说明所提控制算法具有较好的动静态性能和鲁棒性。
图3(b)和4(b)给出了两种算法下电磁转矩的变化曲线对比,从图中可以发现,文中所提控制算法的转矩脉动非常小。另外,图3(c)和4(c)给出了两种控制算法下磁链估计值的变化曲线对比,同样可以发现,文中所提控制算法具有较快的动态响应速度。
从以上仿真结果可以看出,文中所提控制算法仍保持传统DTC控制固有的转矩快速响应的特征和对系统参数摄动、外干扰、测量误差以及测量噪声具有鲁棒性强的优点,且转矩脉动比较小,有效地改善了系统的动、静态运行性能。

图4 基于变结构DTC的仿真结果
4 结语
为了提高PMSM调速系统的动态性能,本文提出了一种旋转坐标系下PMSM变结构直接转矩控制。文中首先给出了旋转坐标系下PMSM矢量数学模型,其次将二阶滑模控制和直接转矩控制相结合,基于螺旋算法设计了一种变结构直接转矩控制。最后与传统DTC控制进行充分比较分析,验证了所提控制算法具有较好的控制性能,且算法简单,便于实现。
