微纳加工的二轴快刀伺服器拓朴结构优化设计*
2018-08-07周欢伟邱玉良陈新度
周欢伟,邱玉良,陈新度
0 引言
随着对光学微结构的要求提高,其自由曲面的加工精度显得越来越重要。快刀伺服器作为宏微复合平台中超精密加工微动平台,主要用于光学微结构模具的微阵列自由曲面结构有其特定的效果。但是,压电陶瓷的频率越高,在相同电压驱动下,产生变形量越小,使快刀伺服器加工效率较为低下。为了解决这类矛盾,国内外研究者提出设计放大位移机构的策略,如Scott-Russell机构、杠杆式放大机构、压曲放大机构等。Niezrecki,C.等人[1]在1996年根据三角能放大位移的特点,设计了一种压曲放大式的柔性铰链,其能放大压电陶瓷产生的微位移,并且近年来,此机构已经被大量运用[2]。沈剑英等[3]在2013年利用杠杆原理,设计出了一种杠杆式柔性铰链机构,将其运用到实验后,获得了机构误差为1.3%的精密放大位移机构。上述快刀伺服器大都是一维快刀伺服器,只能做1个自由度的匀速进给运动,二维快刀伺服器是通过2轴实现二维自由度运动,其具有以下优势:(1)由于具有二轴同时运动的能力,在机床X向与Z方向上,利用二轴自由度的灵活性,获得FTS在高频运动时使刀尖点能根据微结构的自由曲面形状有效补偿加工,获得超精密的自由曲面微结构;(2)二轴快刀伺服器能改变传统一轴快刀伺服器的驱动方式,由于增加了主运动,其静力学模型和动力学模型发生明显的改变,利用二轴控制灵活的特点,能实现快刀伺服器在加工过程时的闭环控制,进一步提高超精密加工的质量。
由于压电陶瓷驱动快刀伺服器工作行程短,国内尚无位移达到900μm,频率达到2 kHz的快刀伺服器报道。本文旨在通过设计兼顾位移和频率,且能有效加工优质自由曲面的二维快刀伺服器,研究柔性铰链的结构尺寸对刚度的影响,获得可用于加工微纳结构的新型快刀伺服器。
1 总体结构布局
宏微复合平台由宏平台带动微平台运动组成,微平台安装在宏平台上,微平台利用安装在同一个中心轴的2个压电陶瓷,使微平台分为沿X轴方向运动的机构和沿Y轴方向运动的机构,实现二维运动。二维快刀伺服器由柔性铰链联接,如图1所示,利用1个压电陶瓷,通过压电陶瓷驱动X轴柔性铰链平台;4个分离式柔性铰链将X轴柔性铰链平台连接在固定座上,利用1个压电陶瓷驱动,实现Y轴的进给。金刚石刀具固定在X轴柔性铰链平台的X方向的活动端,X轴柔性铰链平台的X方向一端与第2个压电陶瓷的一端固定,另一端活动,当压电陶瓷在电压的作用下增长时,在铰链杆的带动,使半圆角柔性铰链变形,使另一端活动带动金刚石刀具运动。本设计可实现2轴同时高频运动,达到放大压电陶瓷微动输出位移,满足高频响、高加速度、高精度的加工要求。
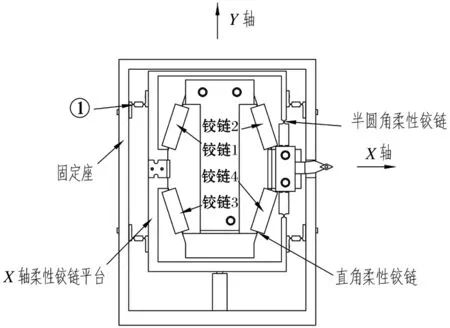
图1 二轴快刀伺服器布局图Fig.1 Layout of Twoaxis FTS
2 二轴的关键结构设计
2.1 X轴柔性铰链平台关键结构设计
上驱动杆固定在X轴柔性铰链平台上,下驱动杆与上驱动杆对称安装在X轴柔性铰链平台上,中间空置位置固定压电陶瓷的两端,通过连接件固定在X轴柔性铰链平台上。当压电陶瓷1受电压的作用时,压电陶瓷的长度增大,压电陶瓷驱动上驱动杆与下驱动杆向外扩张,带动X轴柔性铰链二轴平台沿Y轴运动,由于柔性铰链的柔性较大,可将柔性铰链变形,迫使刀具沿X轴正方向运动,达到刀具沿X轴进给。
2.2 Y轴自由度的机构设计
X轴柔性铰链平台用通过螺丝柱将4个活动柔性铰链固定在固定框上,X轴柔性铰链平台一端是与压电陶瓷2固定,当压电陶瓷2在电压的作用下,直接将力作用在X轴柔性铰链平台上,X轴柔性铰链平台在受到作用力后,将力传递到活动柔性铰链上,由于活动柔性铰链的圆角型铰链柔性较大,实现将X轴柔性铰链平台整体运动,带动X轴柔性铰链平台上的刀具沿Y轴运动,达到刀具沿Y轴进给。
3 具有放大效果的设计策略
由于压电陶瓷具有高频运动的效果,但其在电压作用下,位移量较小,因此需要放大。如图2所示,将X轴方向的柔性铰链设计成对称的等腰梯形,利用对称式的四杆机构原理,当角大于45°时,实现位移放大的效果。当压电陶瓷1驱动X轴柔性铰链平台运动时,由于分离式柔性铰链是横向接触,产生的刚度较大,刀具只能沿X轴移动。又由于X轴柔性铰链平台的铰链杆1、铰链杆2是沿Y轴对称分布,铰链杆3、铰链杆4是沿Y轴对称分布(如图1所示);铰链杆1、铰链杆3是沿X轴对称分布,铰链杆2、铰链杆4是沿X轴对称分布。当铰链杆1与X轴夹角为72°时,根据tan72°=3.08,故行程位移放大到3.08倍。铰链杆1、铰链杆2是沿Y轴对称分布,故铰链杆2的行程位移放大也同时放大到3.08倍,使得X轴上半部的行程位移放大至6.16倍。由于铰链杆1、铰链杆3是沿X轴对称分布,铰链杆2、铰链杆4是沿X轴对称分布X轴上半部的行程位移也放大至6.16倍,致使在压电陶瓷1在电压的作用下,X轴柔性铰链平台的整体放大倍数为6.16倍,实现X轴柔性铰链平台的位移放大效果。
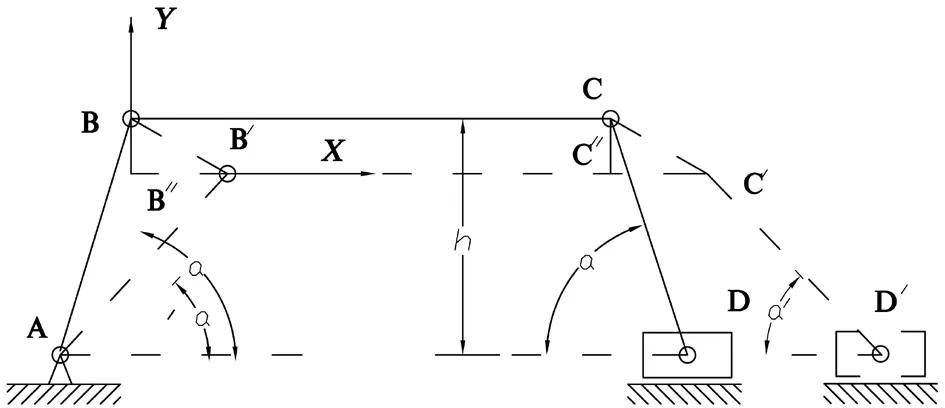
图2 放大位移工作原理图Fig.2 Principle Diagramof Magnifying Displacement
4 影响位移量的关键因素
获得较大的位移量是设计快刀伺服器的目标,而大的位移量主要受动态刚度、阻尼、固有振型影响,特别是动态刚度反映抵抗受力变形的能力。柔性铰链的材料、结构形式、关键尺寸等对动态刚度的影响度十分明显。动态刚度直接与固有频率相关,为了获得较高的加工质量,快刀伺服器应该避免共振,需要研究桥式柔性铰链的材料、结构形式、铰链的宽度和厚度等对模型位移量的影响规律。
4.1 材料对模型的影响
常用柔性铰链的材料有304不锈钢、60Si2Mn、Tc10(α+β型钛合金)、Ni18Co9Mo5Ti、QBe2等,由每种材料有其特定的物理性能(如表1所示),故在同等温度和作用力下,相同的结构有不同的变形量。
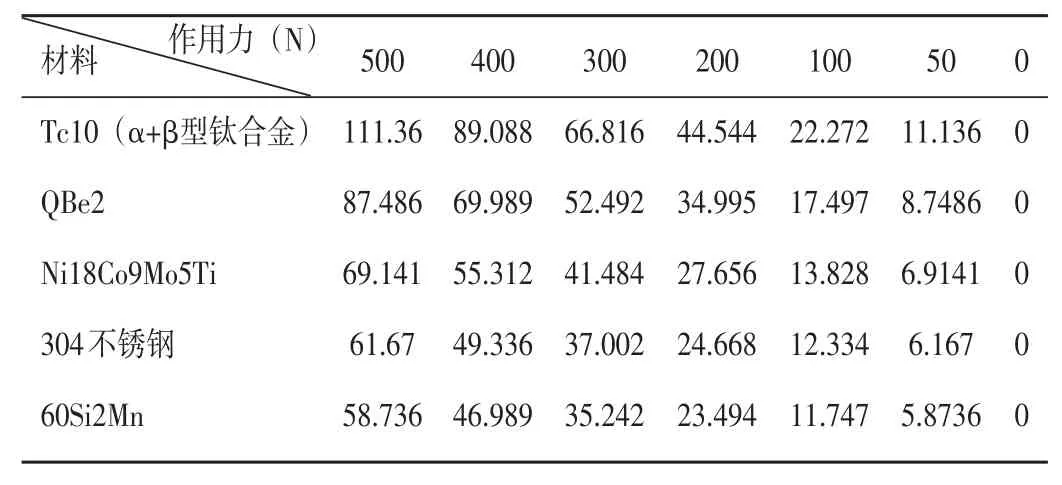
表1 材料对位移的影响(单位:μm)Table1 Effect of Material on Displacement(Unit:μm)
为了更好地分析变形量的大小,根据不同材料的弹性模量、泊松比、密度等物理特性,通过三维建模技术,形成如图1所示的桥式柔性铰链模型,将其导入到Ansys软件中,根据有304不锈钢、60Si2Mn、Tc10(α+β型钛合金)、Ni18Co9Mo5Ti、QBe2等不同材料的物理特性,通过网格化后,分别在模型上加0 N、50 N、100 N、200 N、300 N、400 N、500 N的作用力,会产生不同的微位移量。仿真分析可得如图3所示的刚度曲线图。
通过仿真发现,Tc10(α+β型钛合金)、QBe2、Ni18Co9Mo5Ti、304不锈钢、60Si2Mn的刚度依次变低。也就是说,弹性模量越小的材料,变形量最大,本次研究采用304不锈钢作为桥式柔性铰链的材料,根据其密度获得桥式柔性铰链的质量m=5.835kg。

图3 常见材料变形量Fig.3 Deformation of Common Materials
4.2 结构形式对模型的影响
研究分析表明,直梁型、倒圆角直梁型、椭圆型、抛物线型、双曲线型等5种型式[4]为常见的柔性铰链的铰链形式。由于结构形式不同,在相同作用力下的变形量大小和存在的应力各有不同。快刀伺服器的柔性铰链需要高频、大位移,双曲线型柔性铰链、抛物线型柔性铰链和椭圆型柔性铰链的柔性铰链的铰链应力集中小,但在相同作用力下,变形量小。而直梁型柔性铰链和倒圆角直梁型柔性铰链具有较好的柔性,变形量大。综合上述,采用直梁型柔性铰链和倒圆角直梁型柔性铰链相结合的方式,设计出柔性度较大的桥式柔性铰链。
4.3 宽度对模型的影响
相同作用力下,对应不同的柔性铰链宽度,能获得不同的变形量。现保持17 mm厚度不变,将宽度从0.5 mm开始,递增到4 mm。分别在ANSYS环境下进行仿真分析,通过网格化分析后得到如图4的结果图。
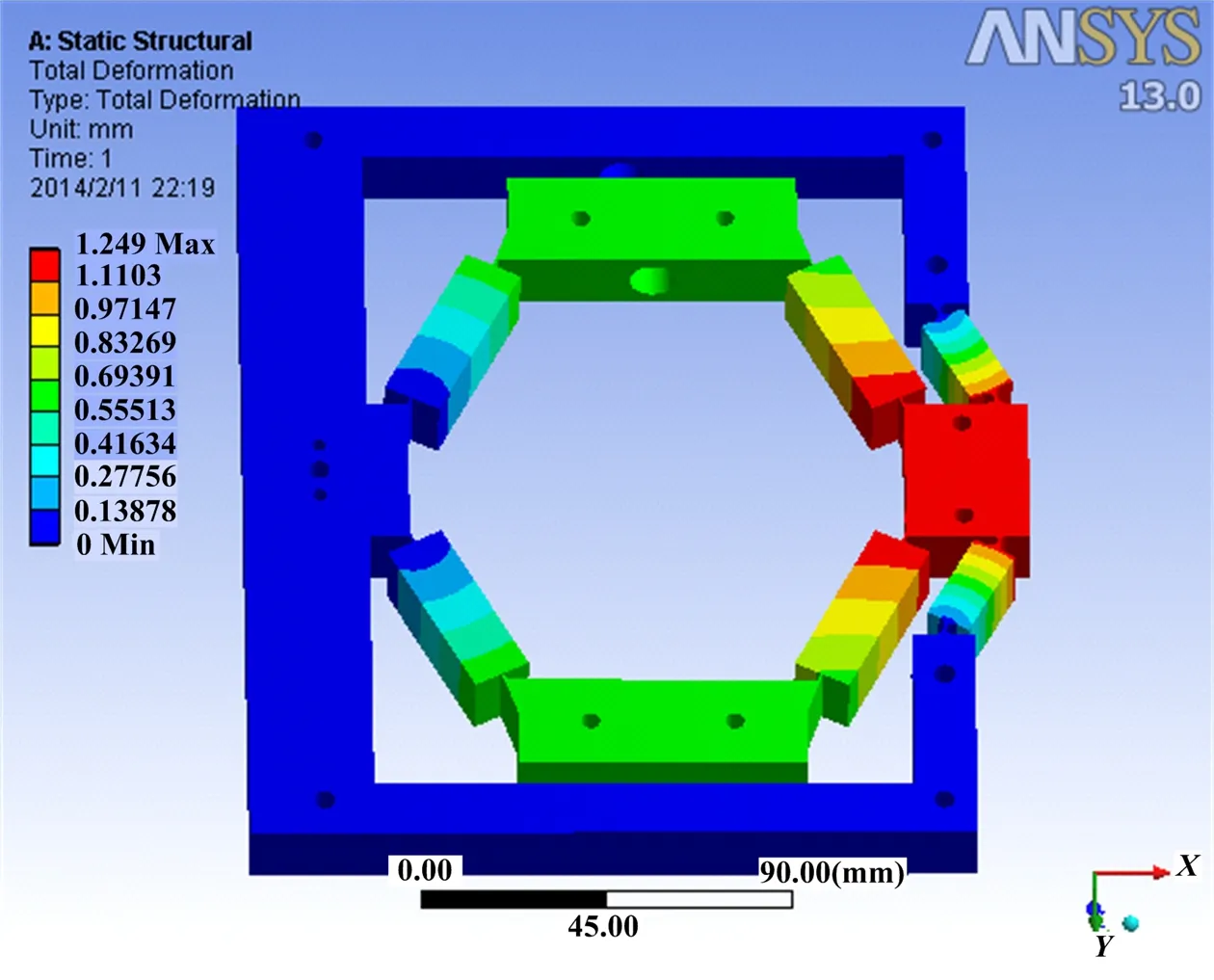
图4 宽度t=0.5 mm的变形量Fig.4 Deformation of Width t=0.5 mm
通过分析,得到如表2的变形量,从表中可得,快刀伺服器的位移变化量与宽度紧密相关,桥式柔性铰链宽度每减少0.5 mm,变形量最大可达0.973 58 mm,特别在宽度为0.5 mm~1 mm处的敏感度较高。为了获得较好的变形量,本研究选择的宽度为0.5 mm。
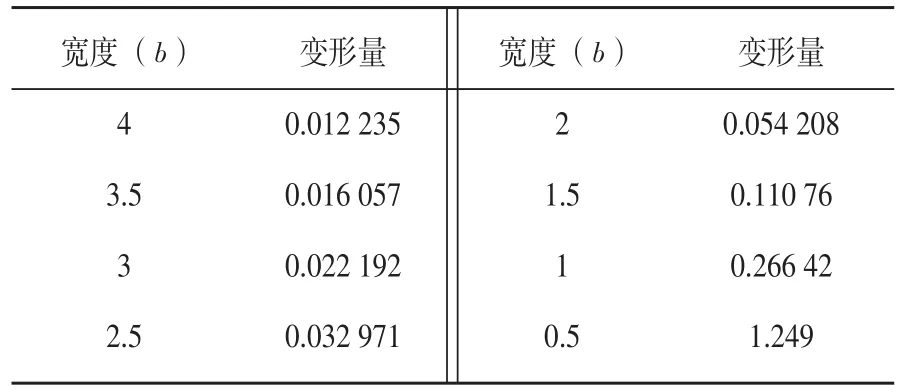
表2 宽度对位移的影响(单位:mm)Table2 Effect of Width on Displacement(Unit:mm)
4.4 厚度对模型的影响
为了分析厚度对桥式柔性铰链的变形影响程度,将铰链的宽度保持1.5 mm不变,将厚度t从12 mm到19 mm每间隔1 mm逐步递进。通过ANSYS网格化分析后,获得对应的变形量(如图5所示),获得不同厚度对应的变形量(如表3所示),厚度越大,变形量越小,厚度每增加1 mm,变形量最大减少0.012 56 mm之间,与宽度对位移影响的敏感度对比,厚度对桥式柔性铰链的变形敏感度较低,故本研究不研究厚度的位移的影响程度。
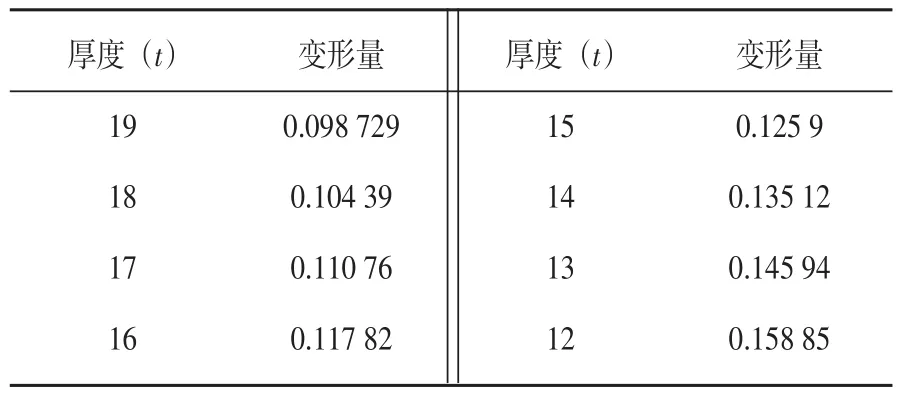
表3 厚度对位移的影响(单位:mm)Table 3 Effect of Thickness on Displacement(Unit:mm)

图5 厚度b=12 mm的变形量Fig.5 Deformation of Thickness b=12mm
5 小结
论文以二维自由的快刀伺服器需求出发,先对实现X轴和Y轴的结构进行了系统设计,然后探索了不同柔性铰链结构形式对快刀伺服器的刚度影响规律,通过分析不同尺寸的柔性铰链对快刀伺服器刚度的影响规律,获取较优二轴快刀伺服器拓朴结构,从而满足于超精密加工光学微阵列结构。