数字天顶仪中恒星像点轨迹的快速定位方法
2018-08-07刘先一张志利周召发张西辉杨上
刘先一, 张志利, 周召发, 张西辉, 杨上
(火箭军工程大学 导弹工程学院, 陕西 西安 710025)
0 引言
随着电荷耦合器件(CCD)的发展,数字天顶仪成为一种高精度天文定位仪器[1-2]。国外对于数字天顶仪的研究较为成熟[3-4],而国内对数字天顶仪的研究还处于样机阶段[5]。数字天顶仪通过旋转到不同方位上进行星图拍摄[6-7],将拍摄的恒星星图与星表结合进行星图识别,建立识别恒星的图像坐标系和天球切平面坐标系之间的转换关系,迭代数次后实现对测站点天文坐标的解算[8-9]。
目前星图识别的方法主要有三角形星图识别及栅格识别等方法,其中三角形星图识别方法由于可靠性高,得到了广泛的应用。在运用数字天顶仪进行定位时,通过三角形星图识别方法对每一幅恒星星图单独进行识别[10],但是计算量较大且效率不高。国内对国外的星图识别方法进行了借鉴,考虑到在旋转拍摄恒星的过程中,拍摄的恒星星图中会存在相同的恒星,同一颗恒星可能在多幅恒星星图中出现。目前,对于恒星像点轨迹的研究较少,对星图识别的提高大多是通过改进识别算法完成的[11-12]。本文在考虑地球自转和仪器旋转的条件下,推导了恒星像点的轨迹,并对恒星像点轨迹进行了修正。从恒星像点轨迹的角度研究了星图中相同恒星的区域,基于恒星的像点轨迹提出了一种快速星图识别方法。
1 恒星像点轨迹模型
数字天顶仪由光学望远镜、CCD图像传感器、全球定位系统(GPS)接收机、调平系统、控制系统和数据处理系统等构成,如图1所示,数字天顶仪在定位过程中通过CCD图像传感器进行星图的拍摄。
恒星星光通过数字天顶仪焦点成像于CCD图像传感器像平面上,恒星的像点坐标由像素表示。在拍摄过程中数字天顶仪随着地球的自转一起运动。理想状态下CCD图像传感器的一边与北向平行。实际情况中,CCD图像传感器的摆放位置与北向之间存在着夹角A. 在CCD图像传感器上建立图像坐标系,以图像传感器的起点为原点,两侧边缘方向为x轴和y轴。假设此时恒星在CCD图像传感器像平面上的坐标值为(x0,y0),将其转化到理想状态,如图2所示。
进行图像坐标的转换,可得
(1)
下面求解恒星像点的轨迹,数字天顶仪的焦距为f,恒星像点在理想状态下的图像坐标可表示为(xp0,yp0)。随着地球旋转θ角后,恒星像点转化到理想状态下的图像坐标变为(x′p0,y′p0),则有
(2)
由于恒星星光可以等效为无穷远处的平行光,在CCD图像传感器随着地球旋转的过程中,可认为恒星星光始终通过数字天顶仪的焦点,则应满足:
(3)
可得
(4)
由于拍摄时间间隔较短,地球旋转角θ很小,sinθ≈θ,cosθ≈1. 对(4)式进行简化后可得
(5)
联立(1)式和(4)式可得
(6)
数字天顶仪拍摄天顶恒星时,采用的是旋转拍摄的方法,拍完一幅星图后旋转角度β进行下一幅星图的拍摄。旋转后恒星像点的图像坐标为(x′,y′),则有
(7)
联立(6)式和(7)式,化简后可得
(8)
通过推导可知理想状态下恒星像点的轨迹满足(8)式,显然恒星的像点轨迹与初始方位角A、旋转角度β及数字天顶仪随地球旋转角度θ有关。
2 恒星像点轨迹的修正
天顶上的恒星经过数字天顶仪焦点成像于CCD像平面上,恒星像点的轨迹受到光轴主点偏移、焦距变化以及CCD像平面倾斜等因素的影响,因此需要对恒星像点的轨迹进行修正。
2.1 光轴主点偏移与焦距引起的轨迹修正量
在运用数字天顶仪进行定位时,数字天顶仪的光轴会发生一定的偏移,因此会带来恒星像点的CCD图像坐标值发生变化,则有
(9)
另外,数字天顶仪的焦距存在一定的偏差量,由f变为f+Δf. 综合考虑光轴主点偏移及焦距所引起的恒星像点轨迹变化,则有
(10)
式中:φ为数字天顶仪的旋转角度。
数字天顶仪每拍完一幅星图后会旋转一定角度进行下一幅星图的拍摄,因此,由光轴主点偏移及焦距变化引起的恒星像点轨迹的修正量为
(11)
2.2 CCD像平面与光轴倾斜引起的轨迹修正量
运用数字天顶仪进行定位时,要对其进行精调平,但是CCD图像传感器在安装过程中存在着安装误差等因素。另外,数字天顶仪的光轴也有一定倾斜。为了更好地研究倾斜对于恒星像点轨迹的影响,将CCD像平面的倾斜和光轴的倾斜统一表示进行研究,如图3所示,光轴指向为z轴,在CCD图像传感器平面上建立x轴。
在Oxz平面内光轴与CCD像平面的倾斜值为α1,恒星星光与数字天顶仪光轴之间的夹角为ψ1,则恒星像点坐标在x轴方向上的偏差值Δx2为
(12)
ψ1和α1都属于小角度,化简后可得
Δx2=fα1.
(13)
同理,可得恒星像点坐标在y轴上的偏差值Δy2为
Δy2=fα2,
(14)
式中:α2为在Oyz平面内光轴与CCD像平面的倾斜值。
综上所述可知,由于光轴偏移、焦距变化及倾斜引起的恒星像点轨迹的偏差值为Δx′0=Δx1+Δx2、Δy′0=Δy1+Δy2,则对恒星像点的轨迹进行修正后可以得出实际的像点轨迹为
(15)
3 快速星图识别方法
当仪器旋转一定角度后,为了使星表中的同一颗恒星能够在下一幅恒星星图中出现,必须保证两辐星图间CCD图像传感器重合的面积。则有
(16)
式中:h表示CCD图像传感器的单边长度。对(16)式化简后,可得
(17)
当拍摄的恒星像点CCD图像坐标满足(17)式时,在旋转后拍摄的星图中这些恒星将再次出现。如果能够保证拍摄的恒星星图中有相同恒星的数量,则对于提高星图识别的速度和效率将具有较大的意义。数字天顶仪的工作流程为:先顺时针旋转拍摄8幅星图,然后逆时针旋转拍摄8幅星图,即在一个定位循环中,数字天顶仪拍摄的星图数量为16幅,如图4所示,这里旋转角度为π/4 rad.
在进行定位解算时,单幅星图识别的恒星数量一般约为25颗。当识别的恒星数量达到10颗左右时,数字天顶仪的定位精度就基本保持稳定[7],即恒星星图中含有冗余的恒星星点。考虑到在旋转前后拍摄的恒星星图中含有较多相同的恒星,如果在星图识别的过程中只运用星表对其中的一幅星图进行识别,其余的星图以识别出的星点作为简化星表再进行识别,则将使星图识别更具有针对性,并减少了参与星图识别的恒星数量,从而提高星图识别的效率和速度。为了使相同恒星区域内的恒星数量满足定位要求,相同恒星的区域面积至少应达到CCD像平面面积的40%以上,这样才能够保证相同区域的恒星数量达到10颗左右。在运用数字天顶仪拍摄星图的过程中,一个定位循环要拍摄的星图为16幅,其中拍摄的第8幅星图和第9幅星图实际上是在一个位置上的,且在拍摄的过程中第8幅星图和第9幅星图之间的时间间隔实际上是相对较短的[13]。
为了实现只对其中一幅星图进行识别的目标,选取拍摄中间的第9幅(或第8幅)星图与星表结合进行识别,其余星图运用第9幅星图识别出来的恒星作为简化星表再进行星图识别。由(17)式可知,相同恒星的区域是与地球转动角度相关联的,即与拍摄的时间间隔有关。为保证其余星图与第9幅星图中含有相同恒星的数量,必须有效控制两幅恒星星图之间的拍摄时间间隔。为了简化运算,假设数字天顶仪在位置8拍摄恒星星图后继续旋转π/4 rad拍摄,此时,必须保证拍摄的星图与第1幅星图之间的重合面积,则有
(h-|fθcosA|)(h-|fθsinA|)>kh2,
(18)
式中:k为两幅星图重合的面积系数。
对(18)式进行一定的缩放处理,将|fθcosA|和|fθsinA|均取值为fθ,简化后可得
(h-fθ)2>kh2,
(19)
可得总的时间间隔值t满足:
(20)
式中:k取值为0.4,可以解得时间间隔值t为310.5 s,则两幅恒星星图之间的拍摄时间间隔Δt<45 s. 另外,考虑到在旋转过程中电机的转动以及双轴倾角仪的倾角读取等因素的时间限制,又不能使旋转拍摄的时间间隔太短[14-16]。根据仪器参数可知至少要保证时间间隔Δt>30 s. 因此,为了对星图识别进行简化,从而提高星图识别的速度,必须保证两幅星图之间的拍摄时间间隔满足30 s<Δt<45 s.
4 试验数据分析
试验过程中采用的数字天顶仪视场角大小为3°×3°,焦距值为(600±4) mm. CCD采用KAF-16803全画幅图像传感器,分辨率为4 096×4 096,像素大小9 μm,有效面积36.8 mm×36.8 mm. 试验过程中,恒星星图的拍摄时间间隔约为40 s,从而在进行定位时可以只通过恒星星表对第9幅星图进行识别,之后运用第9幅星图识别出来的恒星对其余拍摄的星图再进行识别,这样不仅对星表进行了简化,减少了参与星图识别的数量,而且使星图识别更具有针对性,提高了星图识别的速度。拍摄的其中一幅星图如图5所示。
由于篇幅所限,在这里只给出对其中任意相邻两幅星图进行识别得到的星点数据。表1所示为将旋转前拍摄的星图和旋转π/4 rad后拍摄的星图与依巴谷星表结合识别出的星点数据。

表1 识别的星点数据
表1的恒星序号是指识别出的恒星在依巴谷星表中的序号。由于恒星在星表中的序号是固定不变的,从表1中可知在两幅恒星星图中存在着许多相同的恒星。结合(17)式,并将表1中识别的恒星数据直观地显示出来,可以得出图6所示的示意图。表明当恒星像点的CCD图像坐标处于图6中所示的阴影部分时,在旋转后拍摄的星图中这些恒星将再次出现。图6中的数据分布与表1所示的结果完全一致。
分别采用快速星图识别方法和改进前的星图识别方法对拍摄的一个定位循环星图进行分析,可以得出识别恒星的数量,如表2所示。
对拍摄的多个定位循环进行解算,得到的天文经纬度坐标如图7所示。
对试验数据进行分析可得,改进前的星图识别方法解算单个定位循环的经度精度为0.281″,纬度精度为0.265″,采用快速星图识别方法解算的经度精度为0.283″,纬度精度为0.262″. 显然,采用快速星图识别方法解算出来的天文经纬度精度与运用恒星星表进行星图识别解算的天文经纬度精度基本一致。
在一个定位循环中,数字天顶仪拍摄的星图数量为16幅,采用改进前的星图识别方法,对拍摄的16幅星图进行识别的时间为5 min左右,但是采用快速星图识别方法后,星图识别的时间只需要约2 min,从而在保证定位精度的情况下大大地缩短了定位的时间。
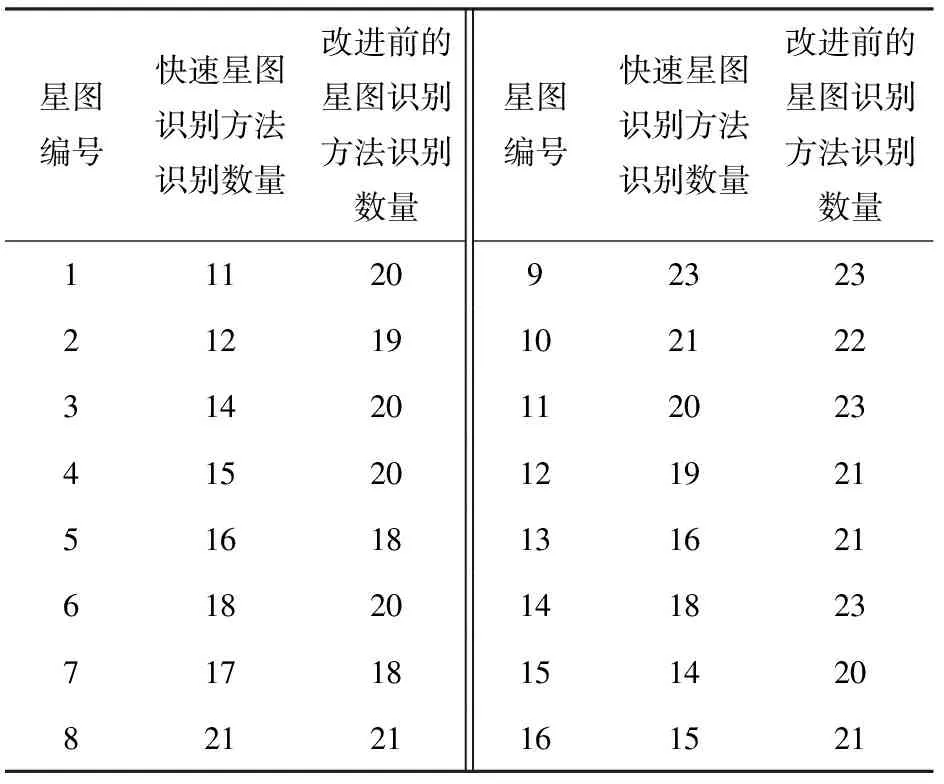
表2 识别恒星数量
5 结论
数字天顶仪通过旋转进行恒星星图的拍摄,通过对拍摄的星图进行识别,解算出测站点的天文经度坐标。在一个定位循环中,星图识别的计算量大,需要较长的时间。通过分析可知:
1)只结合恒星星表对单个定位循环中间的一幅恒星星图进行识别,其余星图以该幅星图识别出的恒星为简化星表再进行识别,使定位精度基本保持不变的情况下显著提高了星图识别的速度。
2)经与改进前的星图识别方法的试验对比,所提方法的星图识别时间从5 min减少到只需要约2 min.