基于舵桨组合模型的动力定位推力分配优化策略
2018-08-06杨奕飞朱海洋谈敏佳
杨奕飞,朱海洋,谈敏佳
(江苏科技大学 电子信息学院, 镇江 212003)
推力分配是动力定位系统(dynamic positioning system,DPS)的一个重要组成部分,其通过控制器基于当前估计状态与期待状态的偏差和控制算法计算出推进器指令给推进器,再由推进器系统提供抵抗外界环境力所需的推力和转矩来实现满足艏向控制、定点控位、航迹控制等动力定位要求[1-2].海洋工程船一般配置多个推进器,各个推进器之间的作用和自身的特性就构成了推力分配中的非凸问题,推力分配实质上就是解决非凸问题的一个非线性寻优求解过程[3-6].
目前,海洋工程船所采用的推进器形式可以分为以下几种:主推进器、全回转推进器、槽道推进器、喷水推进器等.由于其海洋作业要求越来越高,舵机也经常参与配合主推进器进行动力定位,以增强海洋工程船的机动性和定位能力,因此舵桨组合在动力定位系统中占有很重要的作用,可操作性强.舵桨组合在推力分配中有很多优势,而且节约能耗,但是在国内这方面的研究仍然很少.文献[7]提出了一种解决舵桨组合的动力定位推力优化分配的方法,但是只是适用于单一舵桨组合,而且忽略了很多限制条件;文献[8]提出了一种“类混合整数”的推力优化分配方法,把舵桨组合个数推广到一般,并且充分考虑了推进器的各种限制条件等因素.
文中通过等效代换研究了一种舵桨组合在动力定位推力分配中的优化策略,并根据舵桨组合的特征,采用增广拉格朗日算法进行了推力优化分配仿真,表明了舵桨组合在推力分配中更好地节省了能源,使动力定位系统能够承受更大的外载荷.
1 推进器类型及推力可行域

(1)
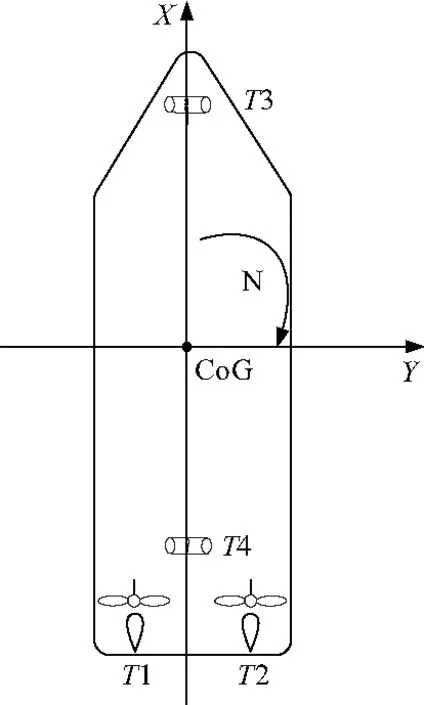
图1 多用途拖轮船推进器配置Fig.1 Actuator layout of the multi-purpose tug
1.1 固定推进装置
固定推进器可以产生正向或者反向推力,但是它的推力方向角α是固定的,可以用一条通过原点且斜率为k=tanα的线段来表示其推力可行域的数学模型,如图2(a).对于多用途拖轮船中固定推进器作为侧推进器使用,只提供横向力,所以推力角度为α=±90°,推力可行域如图2(b),其中推力能力Tmax=-Tmin.

图2 固定推进器模型及其α=±90°的推力可行域Fig.2 Fixed thruster model and it′s thrust region (α=±90°)
1.2 舵桨组合推进装置
舵桨组合主要是舵机配合主推进行产生推力,分为正车模式和倒车模式两种工作状态.当舵桨组合工作在正车模式下,舵机由于主推推力会生成升力和阻力,从而产生的推力可行域是一个关于纵向坐标轴对称的扇形;当舵桨组合工作在倒车模式下,舵机不产生作用,可以将舵桨组合直接看成是一个固定推进器,其推力可行域是一条沿纵向坐标轴的线段[10],如图3.
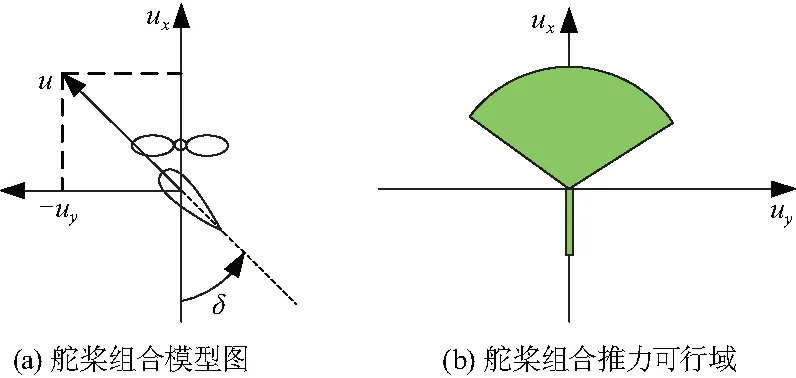
图3 舵桨组合模型及其推力可行域Fig.3 Propeller-rudder pairsmodel and it′s thrust region
对于舵桨组合正车模式下扇形推力可行域,可以采用分解多边形的办法进行近似求解[11-12],如图4.假设扇形推力可行域的边缘上两点(x1,y1)和(x2,y2),两点确定一条直线,即为:
(2)
则直线下方区域的约束条件用矩阵表示为:
(3)
式中:ak,1=yk+1-yk,ak,2=xk-xk+1,bk=xkyk+1-xk+1yk.则舵桨组合扇形推力可行域用多边形近似分解可以得到其矩阵约束为:

(4)
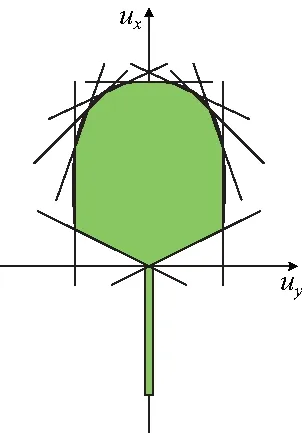
图4 舵桨组合扇形推力可行域的近似处理Fig.4 Approximating the fan-shaped thrust region of the propeller-rudder pairs
2 推力分配优化策略
2.1 推力分配优化数学描述
推力分配问题可以根据优化策略演化为数学寻优问题,其优化目标一般包括低能耗、艏向最优、减小舵的抖动等.同时根据推进装置自身的特征属性对推力优化分配进行约束限制,包括推力可行域的范围限制、推进装置推力的变化率限制、舵角变化率限制等等.通过以上几点要求可以建立如下推力分配的目标函数(5)及约束条件(6)[13-16]:
minf(T,s)=TTWT+sTQs+ΔαTPΔα
(5)
(6)
式中:目标函数中的首项为每一个推进器消耗的能量,W为权重,其数值大小代表了每一个推进器推力与总能量之间的关系;第二项为松弛变量,即3个自由度上力与力矩的误差,Q为权重,数值大小表明了3个自由度上哪个方向最优;最后一项为舵角的变化,P为权重,其数值大小代表了舵的变化频率,防止舵角的大幅度抖动.
2.2 舵桨组合可行域处理
由图4可知舵桨组合的推力可行域是一个非凸区域,因此在推力优化分配时,必须对其进行凸化处理.由于舵桨组合的推力可行域可以根据舵桨组合工作的模式分为两种,即扇形推力可行域和线段推力可行域.所以在处理舵桨组合非凸推力可行域时,可以将每组舵桨组合等效拆分为在相同位置上的两个不同的推进装置,如图5,一个推进装置仅满足舵桨组合正车模式下的扇形推力可行域,另一个推进装置仅满足倒车模式下的线段推力可行域,两者必须满足仅有1个推进装置在同一时刻工作.其等效拆分形式如下:
(7)
式中:Ti,1、Ti,2为等效拆分后2个推进装置的推力矢量;λi,1、λi,2为2个推进装置的工作状态系数,取值为0或者1,但不能同时为0.
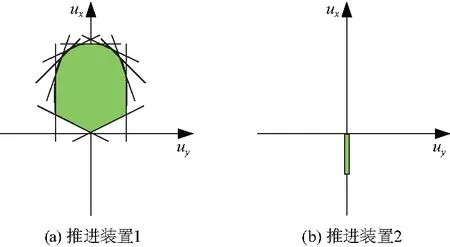
图5 舵桨组合等效拆分模型Fig.5 Decomposition model forthepropeller-rudder pairs
然后通过两个推进装置的工作状态可以知道,多用途拖轮船的双桨双舵组合有2×2=4种情况进行凸化分析推力分配,再结合目标函数,就可以解决舵桨组合在非凸推力可行域下的推力优化问题.
3 实例仿真
文中针对多用途拖轮船进行舵桨组合的推力分配问题研究,比较了舵是否参与推力分配下的功率消耗情况.其中推进装置配置见表1,舵角的限制范围为±45°,变化率为15°/s,推力变化率为20 kN/s,目标函数中的权值矩阵为:W=diag(1,2,1,2,1,1),Q=diag(10,10,100),P=diag(10,10).通过采用增广拉格朗日算法,分别对外载荷在0°~80°方向上每隔10°进行推力分配,其推进器使用率实例仿真结果见表2(Px,Py分别为x,y方向位置).
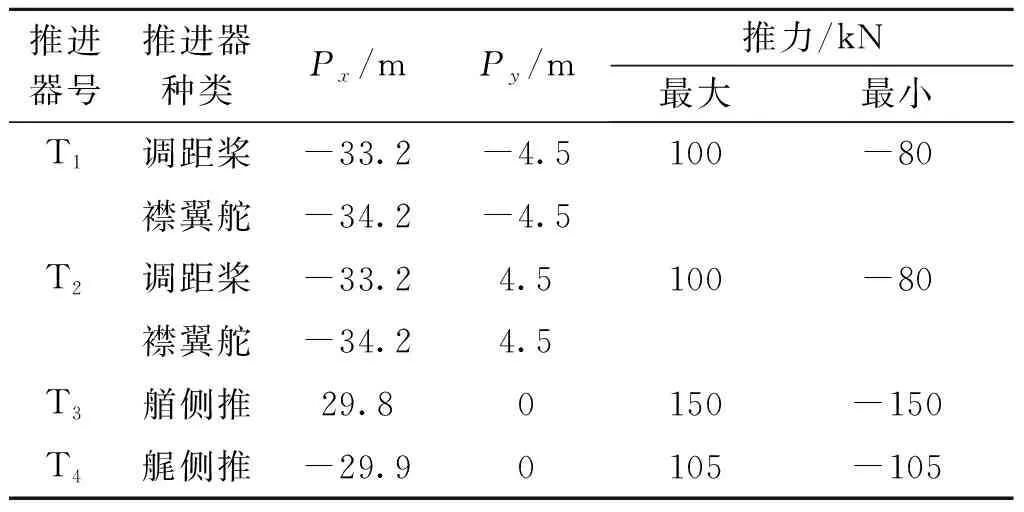
表1 多用途拖轮船推进装置配置Table 1 Actuator layout and allocation of the multi-purpose tug

表2 推进器使用率实例仿真结果Table 2 Simulation results of the propeller efficiency %
由表2推进器使用率数据可以看出:当舵参与推进器进行推力优化分配时,减少了部分推进器的作用,如随着环境载荷的变化,船艉侧推推进器T4的使用率降低近3倍,从而有效地减少了能耗.而且随着环境载荷的方向越接近横荡方向,其使用率减少越多,舵在推力分配中承担的载荷越大,作用越明显.同时在功率消耗上,从图6中可以看到舵的参与有效节省了能源消耗,即在相同能耗下,舵桨组合可以使动力定位系统抵抗更多的环境载荷,使多用途拖轮船的整体动力定位性能提高.
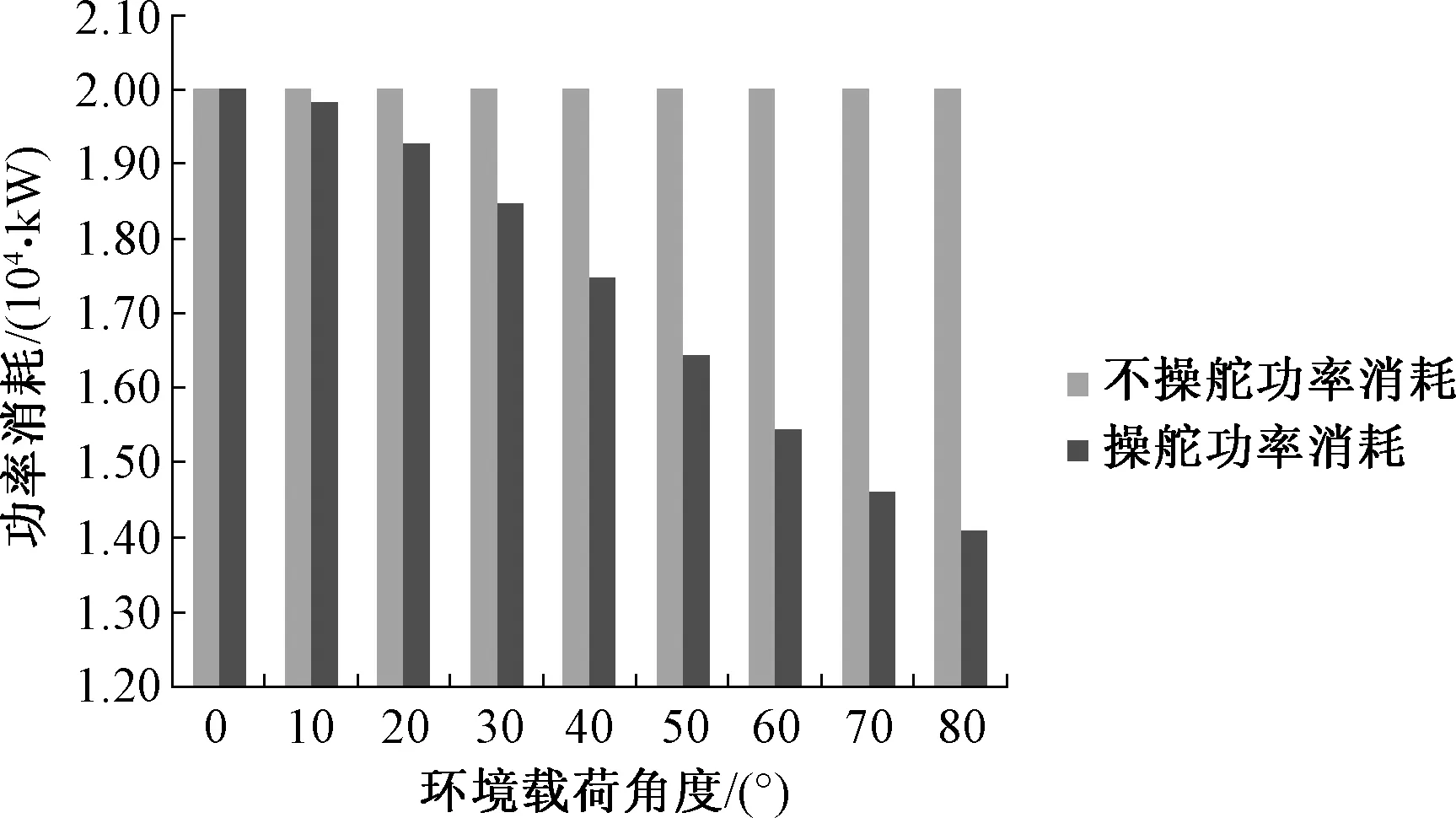
图6 推力分配后功率消耗情况Fig.6 Power consumption situation for the thrust allocation
4 结论
文中以多用途拖轮船为研究对象,结合具体实例进行了基于舵桨组合模型的动力定位推力分配优化策略研究及仿真分析,得到结论如下:
(1) 将舵桨组合等效为在相同位置上两个互相独立且可行域为凸集的推进装置,有效地实现了舵桨组合推力可行域的凸化处理,并通过实例仿真验证了该方法的可行性.
(2) 在动力定位推力分配优化中,舵机的参与使多用途拖轮船可以承担更多的环境载荷,有效地节省了能源消耗,提高了多用途拖轮船的机动性和动力定位能力.
(3) 舵桨组合可操作性强、通用性广,在动力定位推力分配优化策略中占有很重要的作用,其应用前景广泛.
