基于时空方向能量理论的目标运动特征提取方法
2018-08-04张国玉安志勇
张 乐 ,张国玉 ,安志勇
(1.沈阳理工大学装备工程学院,辽宁 沈阳110168;2.长春理工大学光电工程学院,吉林 长春130022)
在制导导弹跟踪阶段,目标的运动方向特征是决定目标定位性能的关键因素之一。由于目标的运动方向特征提取比较复杂,实际上难以直接获得直观的方向,因此对其进行运动分析并展开相应的理论研究具有十分重要的意义。
对于像平面集群目标来说[1],从战场态势来说,存在参战目标数量众多,空间位置密集性等问题;从目标本身来说,存在抗探测手段多样性,机动方式复杂性等问题;从探测环境来说,存在自然干扰不断增多,人为对抗干扰手段日益复杂等问题。因此,集群目标跟踪系统不仅面临复杂交错的战场态势,而且面临密集多目标的运动状态描述以及估计问题。对于像平面单目标来说,由于传统的关于单目标特征的描述方式主要依赖可见光条件下的照明强度,或者红外辐射条件下的辐射能量强度。结合文章待跟踪目标的应用背景特点,根据目标在不同辐射强度同一运动方向模型条件下,仍能够完成准确跟踪的目的。在此基础上,建立了能够严格区分真实目标与背景,可以实时捕捉目标时空方向及其动态特性,对辐射条件的改变有着较强鲁棒性的目标运动模型。
目前,时空方向能量的研究文献较少。Anderson[2]于1985年设计了对大视场小目标图像中各个方向频率改变敏感的处理单元,该文献是在“金字塔尺度”理论的基础上提出的。1985年2月,Adelson和Bergen首次提出了“运动能量模型”概念[3],该理论受早期电影拍摄播放方式的启发,视觉系统以某种方式解释每帧图像中静止目标的连续性,以达到对连续帧中目标运动的感知。论述了带有方向选择性的滤波器对每帧图像中运动方向的能量累积。接下来的研究中,Freeman基于傅里叶级数展开原理,证明任意函数的旋转角度形式可以由基础滤波器组线性组合,将图像流中的每帧图像与基础滤波器组卷积计算,以此得到在任意方向的运动目标。Derpanis在文献[4]基础上将二维平面滤波器组扩展至三维空间,建立了三维时空方向能量表达式。Wildes[5]等将目标的运动方式分类为闪烁静止等运动状态,同实验室的学者Cannons和Wildes[6]联合发表了文章第一次将时空方向能量与Meanshift等跟踪方法结合,实现了方向能量在目标跟踪系统中的应用。
1 时空方向能量理论
视频跟踪系统的应用前提是必须对图像序列每帧图像中的待跟踪目标运动方向敏感,然而数据处理单元的计算能力往往有限。为此,Anderson[2]等人在金字塔理论基础上,构造了能够在较低的数据处理能力条件下实时计算图像中各个方向能量频率改变的处理器。首先,在原始图像序列形成帧间差分图像:

上式中,I(T)表示第 T 帧图像,D(T)表示第 T 帧图像和第T-1帧图像的差分图像。没有发生改变的局部差分值为0.其次,每个差分图像被分解成一组金字塔结构的空间带通频带。Ll(T)是第T帧差分图像。之后,选定一个特定的带通能级进行下一步分析。最后,将各级带通能量集成,形成能量量测。K级的能量值记作,(其中Gk[.]表示高斯函数)

能量值与预定义阈值比较,如果超出阈值,就会认为目标在某个区域积累能量,具有明显的运动趋势。
该类方法与生物视觉分析相类似,生物视觉是视网膜本身有一个中心组织,显著性目标区域分辨率高,外围则逐渐减弱,感兴趣的物体通过眼睛旋转来定位和跟踪目标,这类处理器是计算区域能量变化量测,引导跟踪器注意视场内待跟踪目标的运动。
同时期,Adelson在文献[3]中提出了运动能量模型(motion energy model)概念,将视频序列表示为一个三维空间(x,y,t),通过响应系统来提取运动信息。该系统在时空中调谐线性滤波器,正交输出运动能量量测。文献中以Gabor滤波器为基础,建立一个具有两个输入端口的滤波器,这两个Gabor函数是由同一个高斯函数窗加权的正弦和余弦函数(应用sin2θ+cos2θ=1这一性质),通过其提取能量频率。两个线性组合滤波器的输出,系统随后给出运动响应,即在时空局部产生变化。
2 像平面集群目标和单目标运动方向提取
通过以上的理论分析可知,在传统的多目标跟踪领域,典型的跟踪方法或适用于稀疏多目标跟踪,假设跟踪窗内正确量测唯一,其他视为均匀分布的虚假量测,这种假设条件无法满足密集多目标的跟踪要求;或一旦目标间距小到彼此跟踪窗重叠,每个目标又成为其他目标的持续干扰,这种干扰使得跟踪窗漂移,结果误差大。因此,传统的多目标跟踪无法胜任密集多目标跟踪,而本文的跟踪对象之一集群目标正是由这样一群多目标构成,但是它又不同于其他种类多目标,它属于一种特殊形式——编队集群目标。
这类目标拥有战术队形,彼此空间距离相近,且目标速度,运动方向均有类似的状态约束。编队集群目标以整体出现在探测器视场中,跟踪这类对象,其关键在于通过中心跟踪以实现编队集群的整体跟踪。因此,编队跟踪面对的首先要解决的问题就是集群目标之间的运动特性约束。简而言之,集群目标跟踪的本质就是集群中心跟踪。本小节首先根据集群目标的跟踪思想,借鉴单目标跟踪原理,在解析编队目标的运动特性基础上,结合本文的应用背景及环境,对编队目标群的中心运动方向提取进行有效地基础滤波器组合。
用三维空间设计方法对编队集群中心的运动方向进行提取。
三维空间的导向滤波器的一般表达式为:

R =(α,β,γ),(α,β,γ)分别表示三维坐标系下待选择的方向与坐标轴之间的夹角(θ1,θ2,θ3)的方向余弦,对滤波器的方向采样都是通过方向余弦:

采用三维高斯径向轴对称函数

(1)像平面集群目标运动方向特征提取
通常待跟踪的打击目标为密集多目标组成的集群目标情况下,集群整体不会做出大的机动,因此,针对编队集群目标的运动特点,只需要在三个方向上组合基础滤波器组提取方向能量。分别沿着(x,y,t)的三个基本方向,方向余弦(α,β,γ)= ({1,0,0),(0,1,0),(0,0,1)},即水平、垂直、前进三个方向[6]。
(2)像平面单目标运动方向提取
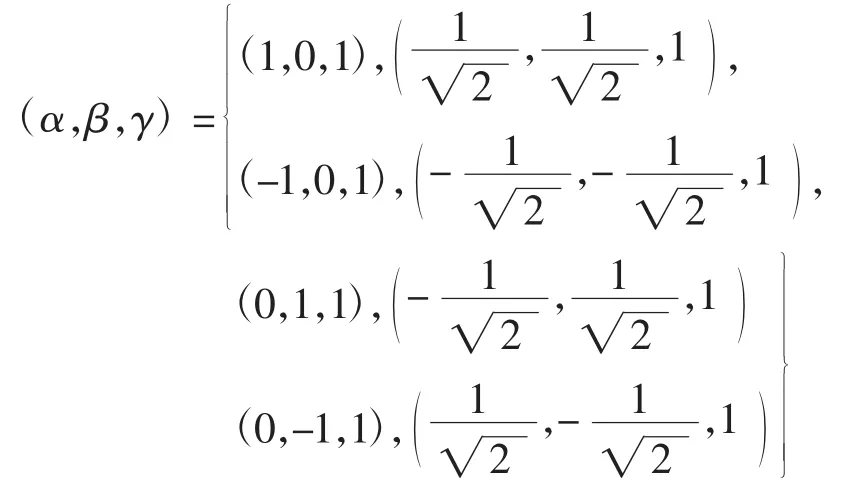
当制导导弹由完成集群目标跟踪阶段转向锁定单目标时,探测器视场内待毁伤对象的机动性能有了相对大的提高,所以系统设计时把提升毁伤目标运动方向改变的捕获能力作为导弹探测系统的一个重要战术指标。这就要求多方向地掌握目标运动状态,建立多方向的导向滤波器组,同时又不能影响系统的解算速度,所以在单目标跟踪阶段设计了八方向滤波器组,既能够满足对目标方向改变的敏感感知,又能够节省时间消耗。方向余弦为:
3 仿真实验与分析
实验一:为了验证时空方向能量特征对集群目标的跟踪效果,与没有时空方向能量运动特征进行约束的方法进行对比,设置了二维平面内地面(非公路)移动目标的运动场景。总的仿真时长300 s,数据间隔3 s.仿真场景初始状态时间段内目标1,2,3,4组成一个群结构,时目标1与群分裂,2,3,4目标维持之前群结构状态,之后两个子群同时以方向匀速转弯运动,再行驶时长,至整体扫描时段处,目标1和目标2,3,4构成的子群合并,转向至水平方向运动,后匀速转弯垂直方向行驶。目标真实状态轨迹如图1所示。
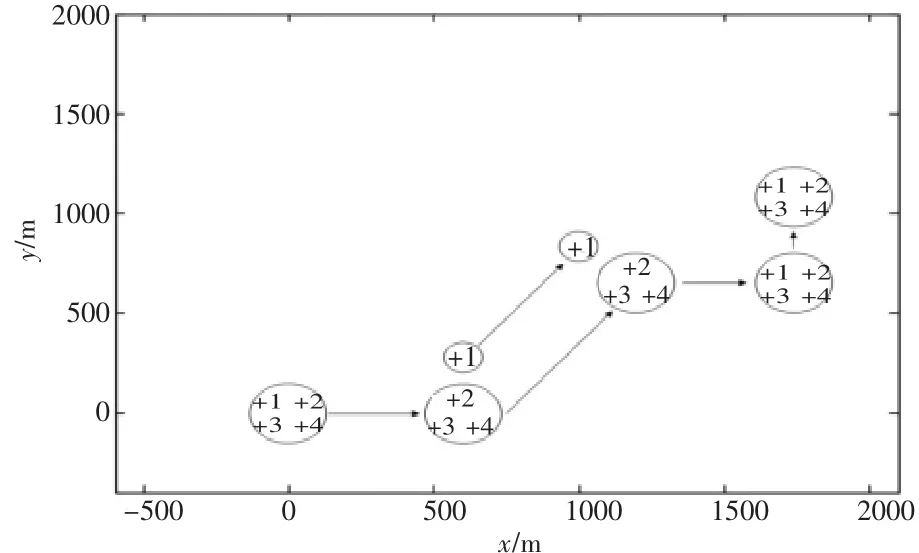
图1 集群目标真实运动状态示意图
图2 (a)表示不含方向能量约束的地面群目标跟踪状态,(b)表示含有群中心方向能量约束的地面群的跟踪状态,图中红色轨迹为群中心跟踪轨迹,可以看出含有描述群运动方向特征相对于不含有方向约束的方法可以更加准确地估计群整体运动轨迹,大大降低了估计轨迹与真实轨迹偏离的程度,方向能量特征可以为跟踪结果提高较为稳定的约束条件。
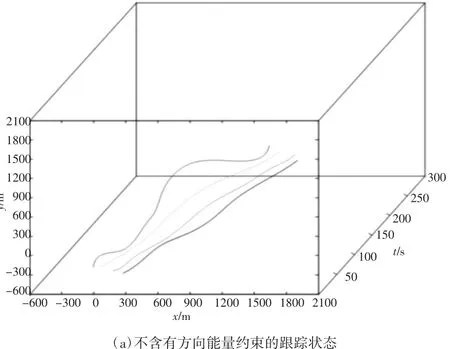
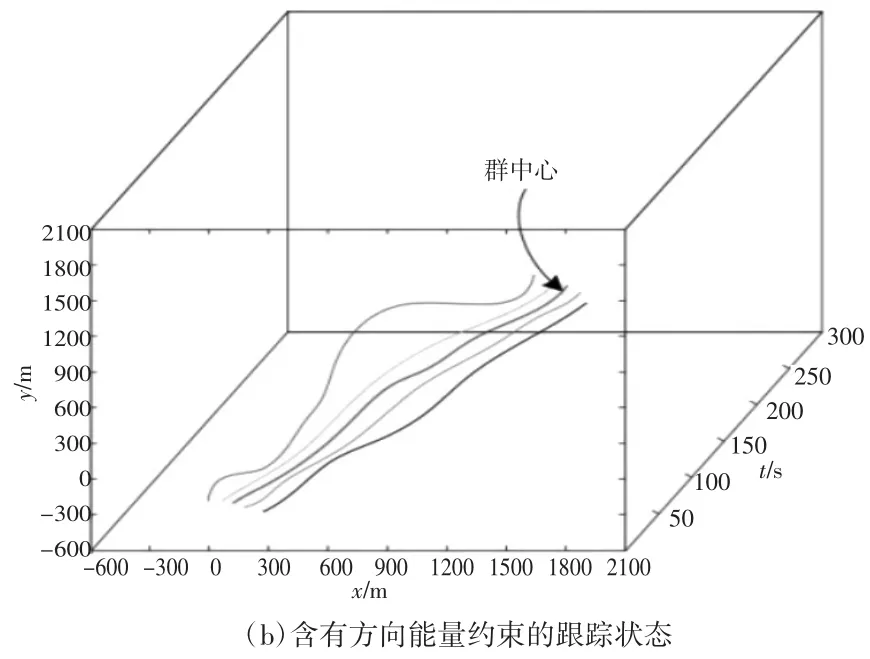
图2 集群跟踪状态对比图
实验二:针对单目标的运动特征,提取该目标的时空方向能量。图3中(a)表示跟踪目标是行人,(b)是跟踪目标对应的八个时空方向能量直方图特征描述,从图中可以看出,栅格标号为3的能量值最大,表示行人在时空中的第三个方向(如图3b所示)累积的能量最为显著,可以看出采用时空方向能量可以描述单目标的运动方向。
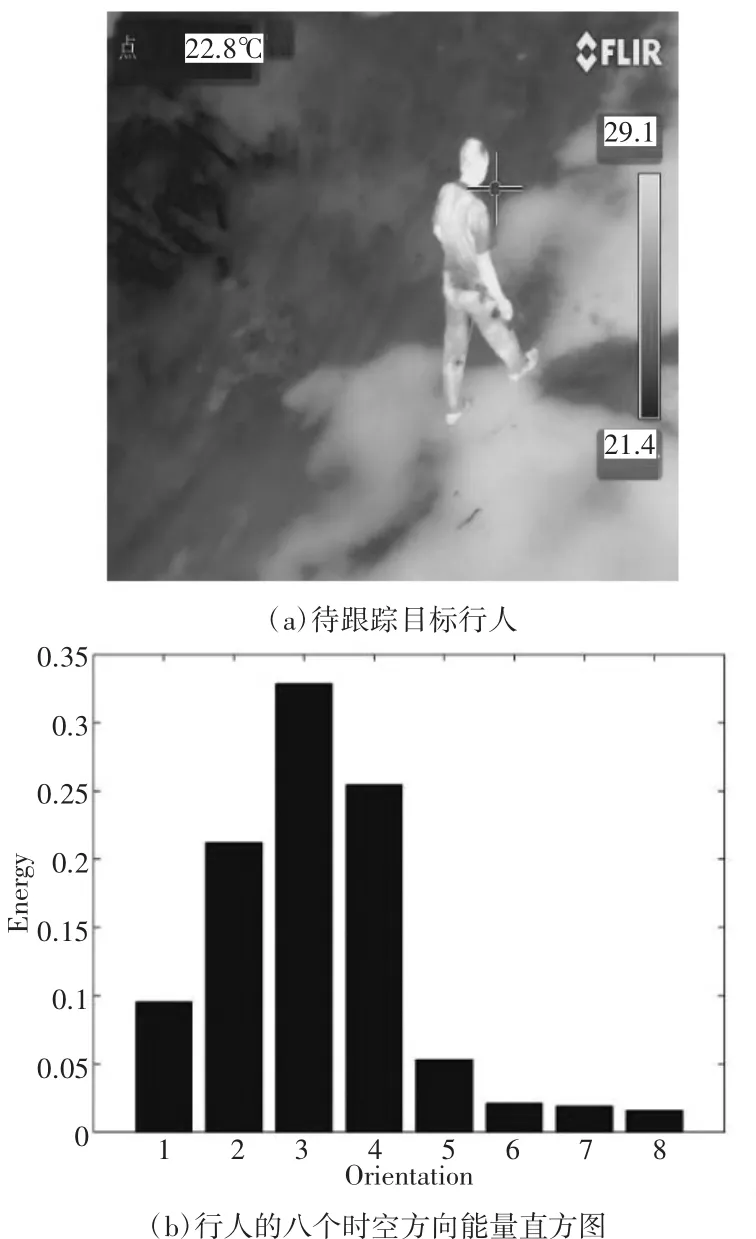
图3 待跟踪目标运动图和时空方向能量特征直方图
4 结束语
本文主要研究了时空方向能量基础理论、导向滤波器组成结构和像平面集群目标和单目标的运动方向提取滤波器设计等问题。从中得知,该理论受生物视觉启发,将目标在探测器显著性区域积累的能量变化最大值视作目标在时空中的运动方向,以此引导探测系统跟踪目标;根据本文的应用背景,集群目标以编队集群目标形式出现在探测器视场内,针对它的运动特性,在设计滤波器组成时将集群目标的运动方向分成三个方向。而单目标的机动性能要高于集群目标,因此设计时将单目标的时空方向能力滤波器组精确地分为八方向。最后,针对集群目标分析对比了时空方向能量对跟踪效果的影响,针对单目标验证了时空方向能量特征可以描述目标的运动方向,仿真实验证明,时空方向能量特征可以对集群目标和单目标进行运动方向约束。