MEA优化的BPNN MEMS加速度计温度补偿系统*
2018-08-03庞作超徐大诚郭述文
庞作超, 徐大诚, 郭述文
(苏州大学 微纳传感技术研究中心,江苏 苏州 215006)
0 引 言
微机电系统(micro-electro-mechanical system,MEMS)加速度计在导航、汽车、消费电子等领域应用广泛[1],其性能受温度影响突出[2],所以加速度计的温度补偿具有重要的实用价值。温度补偿方法分为硬件和软件补偿两大类。工程上多采用通过建立温度模型的软件补偿方法[3,4]。软件补偿的常用方法中[5~8]反向传播神经网络(back propagation neural network,BPNN)非线性建模能力强,能够精确描述加速度计温度模型[8],但其补偿的动态范围受限问题明显。
本文在充分研究思维进化算法(mind evolutionary algorithm,MEA)的基础上,通过MEA优化BPNN结构参数提高BPNN的精度、收敛速度和全局最优性。通过温度补偿实验,大幅提高了硅微扭摆式电容加速度计的温度特性。
1 单轴硅微扭摆式电容加速度计
1.1 结构和工作原理
单轴硅微扭摆式电容加速度计结构如图1所示,由对称电极、支撑梁、锚点、质量块等组成[9]。
当外界施加加速度时,由于质量块左右两边的质量和惯性力矩不等产生扭转,左右两边电极间距变化,改变极板间电容值大小,产生差动电容值ΔC
(1)
式中L为支撑梁与质心间距离;Ls,w,h分别为支撑梁长、宽、高;β为与h/w有关的因数;Ld为支撑梁到电极中心的距离;m为质量块质量;a为加速度输入;G为弹性模量。

图1 加速度计结构简化
差动电容值通过C/V转换、滤波放大电路输出电压值

(2)
式中Cf为C/V转换的反馈电容值;Us为极板所加的载波幅值;U为加速度计输出电压。加速度计的输出电压正比于输入加速度值。
1.2 硅微扭摆式电容加速度计温度特性
硅微扭摆式加速度计的性能受温度的影响主要包括:1)硅材料弹性模量随温度变化;2)温度变化,结构发生不对称变形;3)不同材料间由于膨胀数不同产生热应力[2]。式(1)中,G与温度的关系为
(3)
式中ET和E0分别为硅材料在温度T,T0时刻的杨氏弹性模量;kET为硅材料弹性模量温度变化系数;μ为泊松比。
可以看出,差动电容值变化量与温度有关。温漂影响加速度计的输出精度和稳定性,主要体现在对标度因数(SF)和零偏(Bias)的影响。
2 MEA优化的BPNN温度模型
2.1 BP算法建模原理
为提高传统BPNN收敛速度和拟合精度,采用改进的LM(Levenberg-Marquardt)算法代替梯度下降法修正各层神经元的权值与阈值。
1)确定BPNN结构。如图2采用单隐含层网络结构,网络输入为电压和温度信息,输出为加速度信息。

图2 温度模型结构
2)仿真确定隐含层神经元个数,考虑误差和计算复杂度,选择隐含层神经元为10个,对应标准差为0.59×10-4gn。
NN正向传递的二维温度模型为
(4)
式中a为加速度,为模型输出;X=(Va,VT)为模型输入,Va为加速度计输出电压,VT为加速度计内置温度传感器输出电压;Wih,Who分别为输入层到隐含层和隐含层到输出层的权值;bh,bo分别为隐含层和输出层的阈值;φ,ψ分别为隐含层和输出层函数。
网络目标误差函数为
(5)

Wih=net.iw{1,1},Who=net.iw{2,1},hh=net.b{1},
bo=net.b{2}
(6)
2.2 MEA优化BPNN算法优化过程
为了解决BPNN存在的局部最优问题,本文采用思维进化方法MEA[10]优化BPNN的初始权值和阈值,种群的所有个体都包含了网络的所有权值和阈值,通过所有优胜子群体和临时子群体的趋同与异化过程,得出得分最高的最优个体。最优个体携带的权值阈值信息作为BPNN的初始权值阈值。第j个个体得分Sj为
(7)

在MATLAB上编程实现MEA优化的BPNN算法,设置思维进化算法种群规模为200,优胜子种群个数为5,临时子种群个数为5,进化次数为10次,交叉概率为0.4,变异概率为0.2;设置BPNN输入层为2,,隐含层为10,输出层为1,训练次数为2 500次,学习步长为0.15,最小均方误差为10-13,最小梯度为10-11,最终训练给出全局最优的网络权值和阈值参数。
3 补偿方法验证测试系统
3.1 基于STM32F4的补偿系统
本文进行温度补偿的硅微扭摆式电容加速度计型号为HD6068。该加速度计由一个立体微加工工艺制成的硅元件、低功耗专用集成电路(application specific intergrated circuit,ASIC)等元件组成,采用LCC32,量程±30gn,工作频率0~1 kHz,13 mm×10 mm×1.7 mm陶瓷封装。温度补偿系统组成如图3所示。
系统主要由微处理器、A/D采集模块、D/A模块、电源管理和串口通信组成。其中微处理器读取A/D采集模块采集的数据,进行温度补偿运算,补偿后的数据通过串行外设接口(serial peripheral interface,SPI)传到D/A模块,最终实现双路模拟互补输出。其中微控制器选用STM32F405RGT7,具有高速浮点运算能力,且有足够大的FLASH存储空间,可以满足系统要求。选用24 bit的AD7190,设置输出速率2.4 kHz,满足加速度计输出频率要求。D/A转换单元模块采用18 bit高精度低噪声的DAC9881。

图3 系统框图


(8)

3.2 补偿性能验证测试系统
全温试验采用温控转台自动测试系统,系统以2TS—450带温箱双轴转台为测试平台,离心机滑环输出的数据经RS—232串口读入到工控机,经相关数据处理软件求得输出结果。测试系统框图如图4所示。
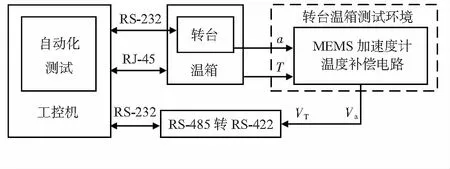
图4 温箱转台工控测试系统
4 测试结果与性能分析
为了评测该补偿系统的性能,测试主要获取该加速度计的非线性(non-linearity,NL)、零偏温度系数BiasT、全温零偏极差ΔBias、标度因数温度系数SFT等参数[11,12]。
为验证温度模型对加速度温度性能补偿效果,采取-40~60 ℃全温试验:通过设置自动化测试程序参数,控制温箱温度以10 ℃为步进从-40 ℃升高到60 ℃,共11个温度点,每个温度点保温1.5 h后,控制转台以0.5gn为步进从-6.0gn逐步升高至6.0gn,共13个速度点,每个加速度稳定15 s后采集30 s的数据。计算温度补偿前后SFT,BiasT,ΔBias,NL,结果如表1所示。

表1 补偿前后性能参数对比
可以看出,温度补偿后的加速度计在-40~60 ℃范围内的非线性、全温零偏极差、零偏温度系数、标度因数温度系数分别变为原来的1/6,1/21,1/6.8,1/5.6,温度特性大幅提高。
从图5可以看出,温度补偿后标度因数增加了1/3,标度因数随温度变化的波动较温度补偿前明显变小,温漂得到明显抑制。从图6可以看到补偿后的非线性由1 576×10-6减小到266×10-6,且随温度变化波动明显变小。

图5 补偿前后不同温度下标度因数

图6 补偿前后不同温度下非线性
为验证算法的全局最优性,测试-40~80 ℃下加速度从-6gn以2gn为步进升高至6gn的数据,分别计算各个数据点用BPNN补偿和用MEA优化后的BPNN补偿输出误差绝对值。

图7 网络优化前后预测误差绝对值对比
图7(a)中70,80 ℃预测误差较-40~60 ℃明显变大,而图7(b)中预测误差基本保持一致,从而验证了MEA优化后的BPNN神经网络具有全局最优性。
5 结 论
本文重点研究了基于MEA优化的BPNN温度补偿方法。测试结果表明:MEMS加速度计的温度漂移得到明显抑制,大幅提高了温度稳定性,满足高精度要求。该补偿方法还提高了传统BPNN算法的全局最优性。MEA优化的BPNN同样适应于不同结构的传感器建模,具有广阔的应用前景。