弧形深松铲工作过程和松土效果的离散元法仿真分析
2018-08-01李玲玲李广宇张煜晗袁洪印
李玲玲, 李广宇, 张煜晗, 袁洪印
(1.长春科技学院汽车机械工程分院,吉林长春 130600; 2.吉林省农业机械研究院,吉林长春 130022)
深松铲在耕作过程中,会使土壤发生破裂和移动等动态行为,即土壤颗粒之间及土壤颗粒与深松铲之间发生相互运动。深入研究深松铲与耕作土壤相互作用的动态过程,才能够设计出省力、高效的深松铲形,进而减小深松铲的工作阻力[1]。离散元法是描述每个独立单元运动及位置的一种数学方法[2-3]。土壤作为一种复杂的多相混合体,其颗粒本身具有离散性质,颗粒群在运动过程中具有分散性,用基于连续、均匀的力学理论分析外力作用下的土壤动态行为变化过程显得很勉强,因此采用离散元法进行分析较理想[4-5]。
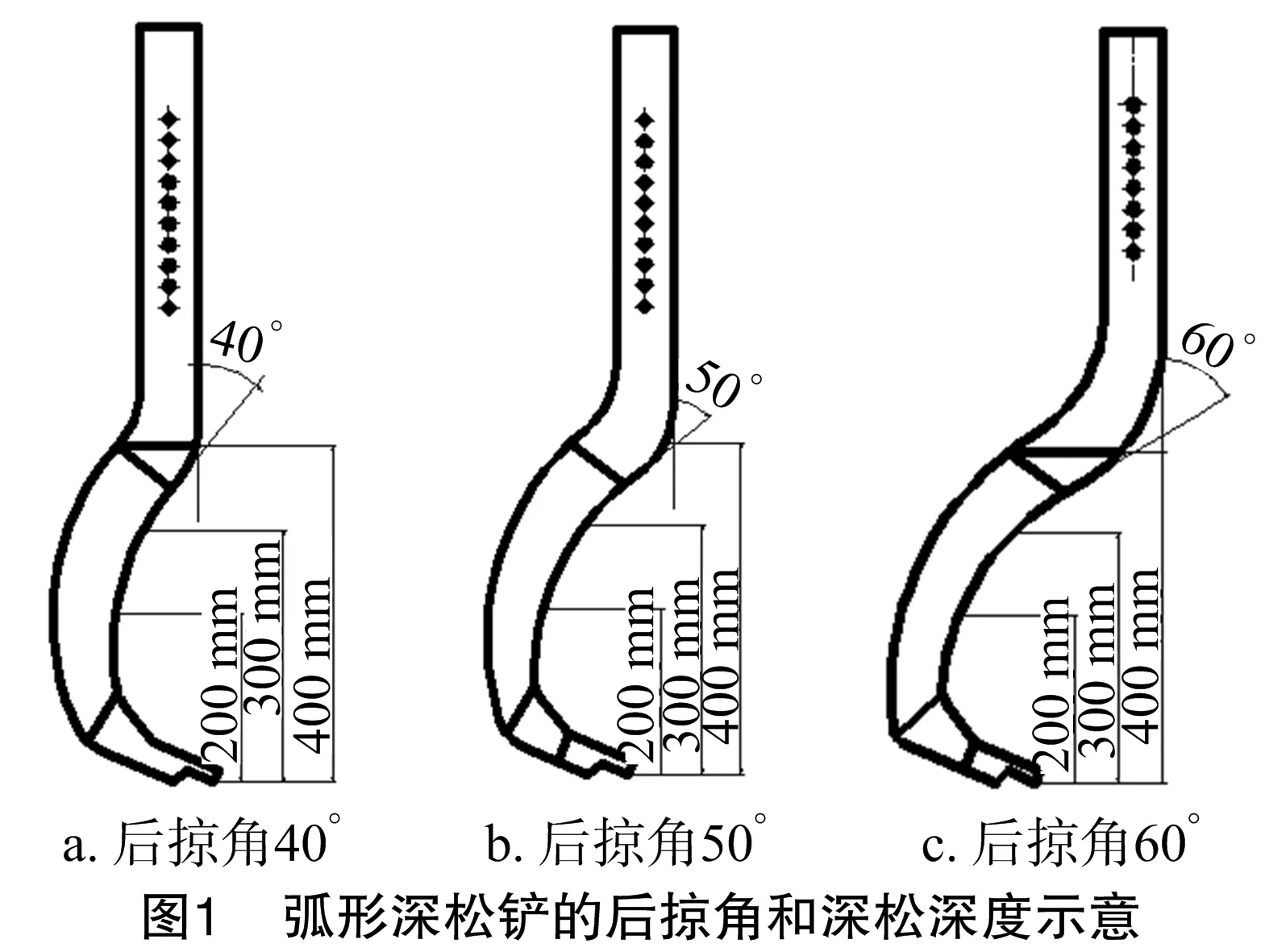
本研究选用3个具有不同后掠角的弧形深松铲为研究对象(图1)。后掠角即深松铲柄上部垂直部分迎土边垂直线与相连的下部圆弧部分上端切线形成的夹角。采用离散元法模拟分析弧形深松铲的工作过程以及松土效果[6],并将离散元法的分析结果与田间试验结果进行对比,探讨应用离散元法分析深松铲工作过程及松土效果的可行性。
1 模型建立与参数选取
1.1 边界模型建立与参数选取
采用离散元法仿真分析深松铲的工作过程,研究边界模型与土壤颗粒的接触情况,并对边界受力情况进行分析。边界模型即为深松铲模型,本研究采用PROE三维软件建立深松铲边界模型,深松铲泊松比为0.28,剪切模量为2.1×1011Pa,密度为7 800 kg/m3,将边界模型的材料参数及运动属性存入数据库中,以备后续模拟时调用。
1.2 土壤颗粒模型建立与参数选取
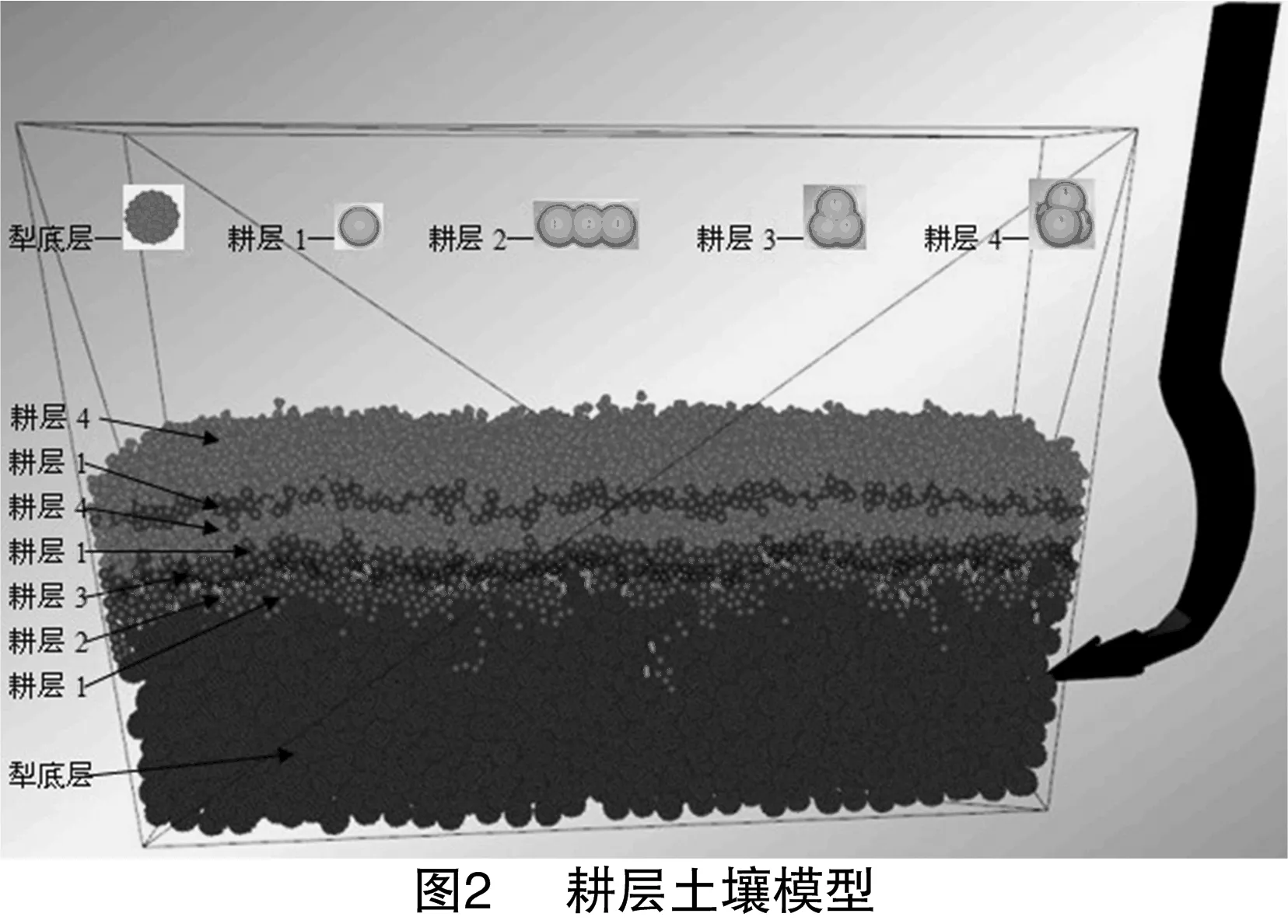
1.2.1 耕层土壤颗粒模型的生成 耕层土壤为距离地表 16~25 cm的土壤,孔隙度大,透气性好。土壤颗粒形状复杂,多为团状、片状、核状和柱状,根据实际耕层土壤颗粒的结构、粒径等情况,将耕层土壤分为7层,对球形颗粒[8]进行不同形式的组合,共建立4种土壤颗粒模型,如图2所示。
1.2.2 犁底层土壤颗粒模型的建立 犁底层为距离地表 20~40 cm的土层,该层土壤含水率较大,存在明显的黏结现象,颗粒间粘附力大,为建立与实际犁底层土壤结构相近的土壤模型[7-8],且能清晰地观察土壤团块在深松铲作用下破碎成小团块或单个土壤颗粒的过程,结合应用程序接口(application programming interface,简称API)颗粒替换法实现土壤的黏结属性。API颗粒替换法即通过API读取颗粒模板数据,将原始单颗粒替换为新的颗粒群的方法。
设置颗粒间的切向最大应力、法向最大应力、弹性模量、土壤颗粒黏结开始时间(黏结时间早于开始替换的时间)、剪切模量。图3为最后生成的犁底层颗粒模型。

以吉林省长春地区壤土作为研究对象,并通过“烘干法”测定得到,耕层土壤和犁底层土壤的含水率分别为(21.15±1.00)%、(25.64±1.00)%。采用环刀法测定得到,土壤的密度范围为1.21~1.48 g/mm3。土壤颗粒间及颗粒与边界间的法向刚度系数(kn)和切向刚度系数(ks)可分别通过离散元三维软件模拟土壤的三轴试验和直剪切试验得到。颗粒与土槽边界间的阻尼系数由下式计算得到
式中:碰撞恢复系数e=0.1~0.3;m为单土壤颗粒质量;k为弹簧刚度。仿真时选取的土壤颗粒参数值见表1。
2 深松铲的受力仿真分析与松土效果的仿真分析
2.1 工作阻力仿真分析
在不翻动土壤的情况下,打破犁底层的板结土块是深松铲的工作性能,结合实际工作情况,分别模拟不同深松铲在不同深松深度及工作速度下的深松过程[9-10]。由表2可知,通过模拟得到3种深松铲在不同深松深度与工作速度下的工作阻力,随着深松铲的不断入土,铲子所受水平阻力不断增加,当深松铲完全入土后,在工作速度与深松深度不变的情况下,不同后掠角的深松铲所受水平阻力大小接近。
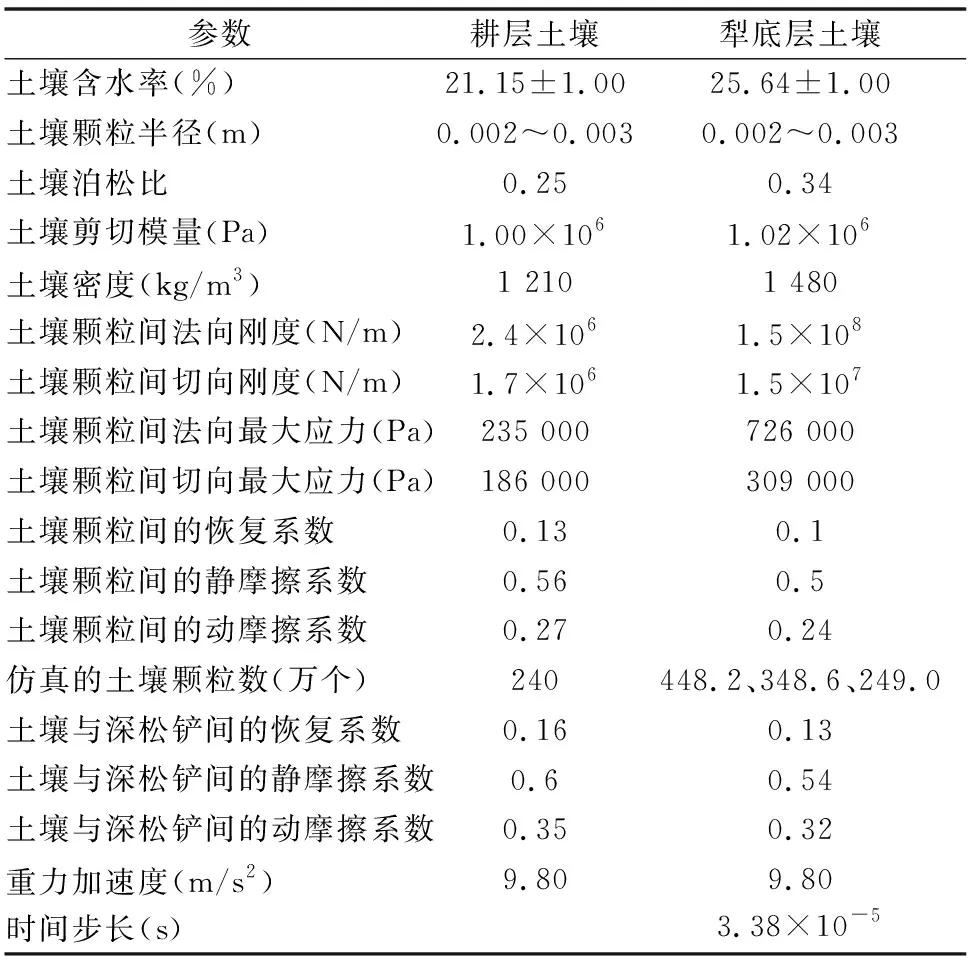
表1 离散元法仿真分析时参数的选取
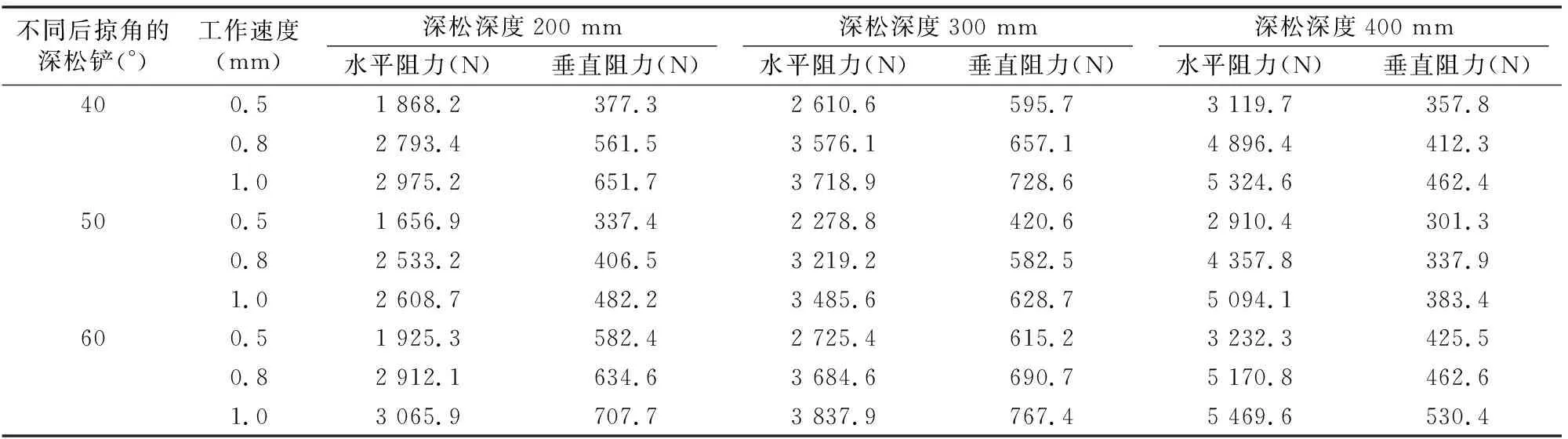
表2 3种深松铲在不同深度与速度下的工作阻力
深松深度对深松铲的阻力影响较大,后掠角度的影响较小;通过分析比较得出,在深松深度与工作速度相同的条件下,后掠角为50°的深松铲所受水平阻力与垂直阻力最小,且垂直阻力远小于水平阻力对深松铲的影响,可忽略不计。
2.2 松土效果仿真分析
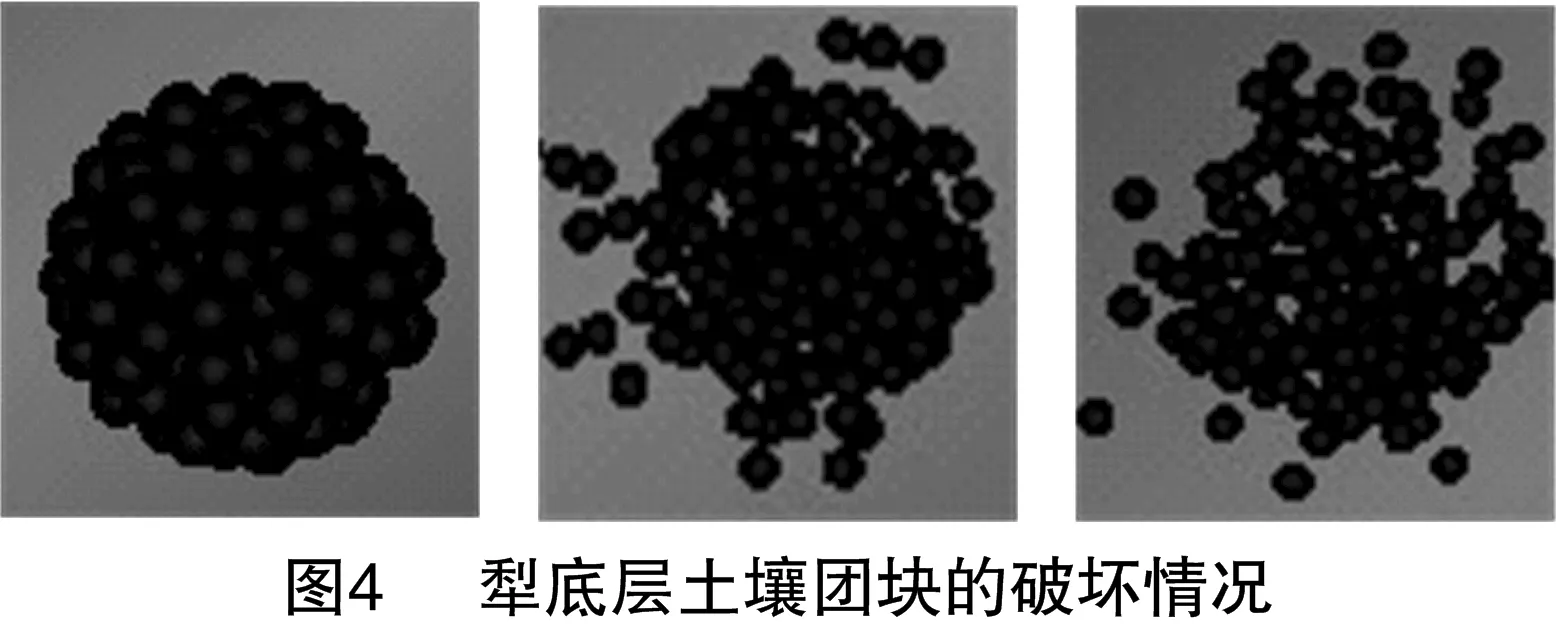
深松铲在工作过程中,土壤会发生平动、转动现象。犁底层土壤团聚体的破裂平移可使小粒径土壤数量越来越多,土层透气性越来越好,有利于植株根系的向下生长;通过高清摄像机观察发现,破碎的小颗粒与耕层土壤颗粒接触得越少,表明深松铲只打破犁底层而不翻转土层的性能越好[11]。因此,为分析土壤内部的微观变化,本研究基于土壤的物理力学性能和建立的边界模型与土壤力学模型,通过离散元法仿真分析土壤颗粒的运动情况及土壤团聚体的破碎情况,如图4所示。
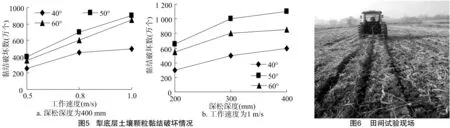
根据仿真结果得到,不同深松深度与工作速度条件下,不同后掠角深松铲在工作过程中,破坏的土壤黏结颗粒数不同。由于土壤颗粒本身具有随机性,本研究进行5次仿真模拟,取其平均值。为更直观地比较不同深松铲的松土效果,将深松铲在不同深松深度、工作速度条件下,犁底层土壤颗粒的黏结破坏情况绘制成折线图,如图5所示。
由图5可知,当工作速度与深松铲类型(后掠角为50°)相同时,随着深松深度的增加,土壤黏结颗粒被破坏成小颗粒的数量增多;当深松深度与深松铲类型(后掠角为50°)相同时,工作速度越快,土壤黏结颗粒被破坏成小颗粒的数量越多;当工作速度为1 m/s,深松深度为400 mm时,后掠角为50°的深松铲,破坏的土壤黏结颗粒数最多,松土效果最好,后掠角为60°的深松铲破坏的土壤黏结颗粒数最少。
3 田间试验设计
3.1 工作阻力的田间试验
为验证离散元仿真结果的有效性,通过田间试验采集不同工况下深松铲的工作信号并进行处理分析得到深松铲在工作过程中受到的阻力情况及其松土效果[12]。深松试验所需的动力由CT904轮式拖拉机提供,在其上拉杆及下悬挂销处分别安装传感器,并用通用电缆将传感器接口与数据采集接口进行连接,通过数据转换实现水平阻力和垂直阻力的测定。试验现场如图6所示。
由于影响深松铲工作阻力的因素很多,且土壤颗粒结构复杂,因此,本研究在对试验结果进行分析时,针对不同的工作条件(工作速度和深松深度),分别进行5次试验,然后取其平均值。
3.2 松土效果的田间试验
通过对土壤蓬松度及碎土效果进行测试,综合反映深松铲的松土效果。深松前后,在与深松机前进的垂直方向上,用耕层断面测绘仪在同一位置先后画出未耕地表线、己耕地表线和沟底线,计算耕前、耕后的土壤截面积,相同行程内测定5次,取其平均值,得出土壤蓬松度。深松后,通过测定土层断面内每10 cm深度土块的平均中径来判断碎土效果。
4 结果与讨论
根据仿真结果得出,后掠角为50°的深松铲在工作过程中,所受工作阻力最小,且松土效果最佳,因此本研究分别从工作阻力和松土效果2个方面,对后掠角为50°的深松铲的仿真结果与试验结果进行对比分析。
4.1 工作阻力的仿真与试验对比
由于垂直工作阻力对深松铲的工作性能影响不大,因此本研究只对水平工作阻力的仿真结果与试验结果进行对比分析。由表3可知,水平阻力仿真值与试验值的变化趋势基本相同。随着深松深度的增加,水平阻力明显增大;工作速度对水平阻力的影响不明显。当深松深度为400 mm,工作速度为1 m/s时,相对误差最大,为24.7%。

表3 水平阻力仿真与试验对比
4.2 松土效果的仿真与试验对比
由表4可以得出,后掠角为50°的弧形深松铲深松后,土壤膨松度提高27.89%。由表5可以得出,在耕深为20~30 cm 的土层中, 土块中径的平均值为3.0~5.0 cm,碎土效果较明显;在耕深为30~40 cm的土层中,土块中径的平均值为1.0~1.5 cm,细碎均匀。

表4 土壤膨松度测试
5 结论
基于离散元基本理论建立耕层及犁底层土壤颗粒模型,并确立仿真参数。仿真分析深松深度、工作速度对深松铲工作阻力和松土效果的影响。在深松铲整体受力方面,仿真结果与田间试验结果基本吻合。仿真结果与田间试验结果误差在11.4%~24.7%范围之内,证明模拟建立的模型及选取的参数是合理的,采用离散元法仿真分析深松铲工作过程和松土效果具有可行性。

表5 碎土效果试验
在松土效果方面,通过对比分析,仿真结果与试验结果得出,后掠角为50°的弧形深松铲在深松后, 土壤黏结颗粒破碎的个数最多,土壤膨松度高,松土效果最佳。
通过对比分析不同深松深度、不同工作速度下深松铲工作阻力及松土效果的仿真结果与试验结果得出,两者变化趋势基本相同,由此证明用离散元法仿真分析深松铲工作性能具有可行性。
