基于滑模观测器的永磁同步电机转子角度估算的研究
2018-07-27
(贵州航天林泉电机有限公司,贵州 贵阳 550008)
0 引言
目前军用领域,永磁同步电机应用广泛,但通常永磁同步电机的控制需要精确的位置传感器,例如旋转变压器,在电机上安装传感器无疑增加了电机的体积及成本,位置传感器的带来的信号线使得产品的接线变得复杂且容易出错,同时在控制器中还需要使用大量的硬件电路对位置传感器信号进行解码,这也无疑增加了控制器的体积和成本。从军用领域电机的失效案例来分析,位置传感器以及位置传感器连接电缆失效占有很大的比重。若采取无位置控制技术,则将简化电机结构设计,降低系统的体积、重量和成本,提高电机控制系统的可靠性。因此永磁同步电机的无位置控制特别适用于航天航空这些高可靠度且对重量体积很敏感的领域。
1 滑模变结构控制的原理
1.1 滑模变结构控制的基本原理
滑膜变结构控制是一种基于控制切换法则的非线性控制,通过在不同控制状态间的相互切换,使得系统当前状态量按照设定的状态轨迹运动,使得系统的实际运行状态无限接近于期望值,其结构模型如图1所示。滑模变结构控制其本质是一种非线性控制,它是根据控制切换法则,通过在不同控制之间的切换,使系统当前状态量按照预定“滑动模态”状态轨迹运动,使系统达到期望点,从而实现对系统的控制。结构模型如图1所示。
(1)
若存在一个超曲面s(x)=s(x1,x2,…,xn)=0,系统空间以s=0为界限被其分割成两部分,即s>0部分和s<0部分,那么在该区域内上面所示存在A、B、C三种运动情况,详见图2。其中C种运动情况对于变滑膜控制有着特殊的意义,若在该超曲面的某个区域中,所有的运动点均为系统终止点,如果运动点趋近于该区域时,均会被吸引到该区域内进行运动,此时称在切换面s=0上所有的运动点均为系统终止点的区域为“滑动模态区”,系统在滑动模态区的运动叫做“滑模运动”。按照这一要求,运动点趋近滑模面(s(x)=0)的时候必须要满足以下两个条件:
a)当运动点在s(x)>0区域,s(x)逐渐减小,运动点从正向趋近滑膜面;
b)当运动点在s(x)<0区域,s(x)逐渐增大,运动点从正向趋近滑膜面;
等效成数学不等式为:
(2)
利用上述条件,可构建李雅普诺夫函数:
V(x1,x2,…,xn)=[s(x1,x2,…,xn)]2≥0
(3)
当系统同时满足式(2)与(3)的要求时,系统在有限时间内达到滑膜面稳定的滑模条件是s(x)=0。

图2 滑模超曲面划分
1.2 滑模状态观测器估算转子位置的原理
根据永磁同步电机的数学模型,电机的反电势相位中包含了转子的位置信息,反电势幅值中包含了转子速度信息。根据滑膜变结构的算法可构建一个状态观测器,将电机中可以实际测量的绕组电流和电压信号作为状态观测器的输入量,从状态观测器估算出的反电势中提取出电机转子的位置和速度信息,实现对电机的无位置传感器控制。通过永磁同步电机αβ坐标系下的电流状态(式4)和反电势方程(式5)定义滑模切换函数(式6)。
(4)
反电动方程:
(5)
滑模切换函数:
(6)

(7)
其中,sign为符号函数,电流误差关信号
为反电势eα、eβ估算值,ks为切换增益。
由式(7)与(4)可得电机定子估算电流差动方程:
(8)


(9)

(10)
ks>max(|eα|,|eβ|)
(11)
通过滑模电流观测器式(7)可获得反电势等效信号,由于高频开关函数的应用,使输出的反电势也为高频非连续信号,存在一定失真,不能直接用于计算转子位置与速度。需要引入一个截止频率足够高的低通滤波器将高次谐波滤除,以得到连续等效信号。低通滤波器模型为:
(12)

(13)
根据式(5)与式(13),可从反电势中提取转子位置信息:
(14)
2 变滑模控制估算转子位置的实现方法
2.1 滑模观测器的设计
根据上述理论,可利用滑膜状态观测器估算永磁同步电机的位置和速度信息。状态观测器是一个数学模型,该数学模型中is为绕组电流、Vs为电机输入电压、es为电机反电势、R为绕组电阻值、L为绕组电感量、Ts为控制周期、z为输出校正因子。为了使电机实际的电流无限接近于测量的电流,电机的模型需要使用闭环控制进行修正,因此状态观测器设计时采用了目标控制电机(实际的电机)对数字化的电机模型进行修正,即利用模型中的估算的电流来匹配测量电流。电流观测器的框图如图3所示。
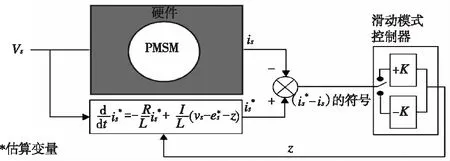
图3 电流观测器框图
滑模状态观测器(SMC)可对数字化的电机模型进行补偿。通过MC的求和接点可计算实际的电流和估算的电流的符号(+1或-1),SMC的输出就是校正因子(z=K*sgn(误差)),该增益可叠加到数字化电机模型的电压项上,用于对数字化的电机模型进行补偿,该过程在每次控制周期中一直重复执行,直至电机实际的电流值和估算的电流值相等。

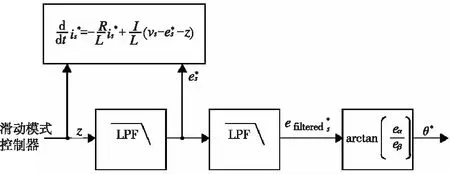
图4 反电势估算框图
2.2 反电势滤波
反电势的作用是用来解算电机转子的位置θ,故而反电势估算的准确与否直接关系到θ角计算的准确度。本文中,电机的反电势是通过SMC计算得到的,但考虑到SMC中使用了高频开关函数,其输出的反电势信号会存在一定的失真,因此需要使用一个截止频率足够高的低通滤波器对高次谐波进行抑制,从而得到电机真实的连续的反电势信号。本文中采用了数字低通滤波器对反电势进行滤波,其数学模型为:
y(n)=y(n-1)+T2πfc(x(n)-y(n))
(15)
为了对z滤波以获得e*,PMSM反电势滤的一阶数字滤波器可写为:
(16)
其中:e(n)为本次估算的反动势值;e(n-1)为 上一次估算的反动势值;Fpwm为PWM斩波频率,滤波器每个斩波周期被执行一次;fc为截止频率;z(n)为滑模状态观测器的输出。
2.3 转子位置THETA的计算
电机反电势和转子位置的关系如图5所示,可利用公式2-14通过反电势对电机转子的θ进行计算。

图5 反电动势和θ的关系
2.4 转子速度计算
由于在计算电机转子位置θ时使用了滤波函数,造成一定的相位延时,因此现在转子速度计算时需要进行相应的相位补偿,具体的过程如下:
a)使用为经过补偿的θ来计算电机转子速度;
b)对电机转子速度值进行滤波并计算补偿数值,如图6所示。
电机转子速度的计算公式:
(17)
其中:ω为电机的角速度;Qn为当前θ值;Qn-1为上一个θ值;Kspeed为比例系数;m为计算周期内θ的累加数量。
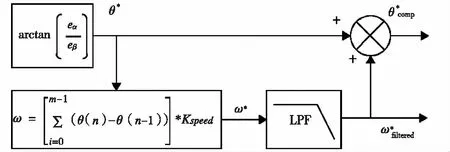
图6 电机转子速度计算框图
3 方案设计
本文采用了微芯公司的dsPIC33EP256MC506-I/PT处理器,该方案的总体硬件原理图如图7所示。该电路主要是以数字信号处理器为核心,通过检测电机的绕组电流来估算电机转子位置,同时处理器根据外部的电压、电流情况对控制器自身进行各类保护。该方案主要由电源变换电路、数字信号处理器最小系统电路、驱动电路、三相全桥逆变电路、电流检测电路。

图7 硬件原理框图
本项目的控制策略是基于FOC无位置传感器的电机,采用永磁同步电机空间矢量控制方式,利用SMC估算转子的位置,实现电机的FOC控制,其控制策略的框图如图8所示如。

图8 控制策略框图
4 试验结果


图9 估计的电流值和实际的电流值对比

图10 转子位置和反电势对比图
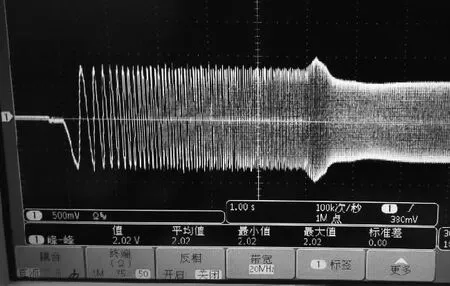
图11 电机启动时电机绕组电流波形
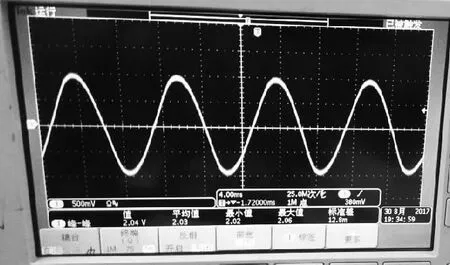
图12 电机绕组电流波形
同时对电机进行了启动试验、稳态运行试验,电机启动时的绕组电流波形如图11所示,稳态运行时的绕组电流波形如图12所示。电机启动采用定位、电流闭环转速开环、电流转速双闭环的策略,具体时间设定为转子定位1 s,电流闭环转速开环时间5 s,Q轴电流给定12 A,切换转速500 rmp。由图11中可以看出,电机启动完全按照软件控制的方式进行,当电机电流闭环5 s后,电机转速达到300 rmp,滑模状态观测器能精确解算出转子位置,电机能立马切换时转速电流双闭环工作模式。由图2中可以看出,稳态运行后电机绕组电流为标准的正弦波,未发生畸变,电机运行效率为83%,说明电机运行良好。
5 结论
本文根据滑模变结构控制的原理,结合永磁同步电机的数学模型,提出了一种基于滑模状态观测器来实现永磁同步电机的无位置控制实现方法。通过试验表明,变滑模结构控制能精确地解算出电机转子的位置,很好的应用于永磁同步电机无位置控制系统中。该种控制方法能有效简化电机结构、减小电机和控制器的体积以及重量,降低控制器的硬件成本,可用来代替传统的带位置传感器的电机控制系统,特别适用于航天航空这些高可靠度且对重量体积很敏感的领域。