模糊增强和极坐标下强度剖面的肝脏血管分割算法*
2018-07-26赵喜林
赵喜林
(浙江工贸职业技术学院,浙江温州325003)
0 引言
肝肿瘤是指发生在肝脏部位的肿瘤病变,已经成为导致死亡的最主要的疾病之一。随着计算机应用技术的快速发展,基于CT扫描图像的血管自动分割技术和血管三维重建技术在医学领域科研价值和临床意义变得越来越重要。
获取较高的肝脏血管三维重建准确率的先决条件是精确对肝内血管图像进行分割。肝内血管分割的主要思路是通过对注有血管造影剂的肝脏部位进行CT扫描得到原始图片,然后根据CT扫描图像中血管的亮度比肝脏内其它组织和器官更亮的先验知识,结合一些现有的分割方法来对血管进行分割和提取。目前最常用的分割方法有基于边界的分割方法、基于区域生长的方法和基于某一特殊理论和工具的分割方法。基于边界的分割方法主要是利用边缘检测来实现血管区域的分割与提取,如高齐新等[1]提出一种基于Canny算子和水平集的肺部血管分割方法,潘林等[2]提出基于嵌入置信度的眼底血管边缘检测方法。基于边界的分割方法容易受噪声影响而导致分割结果的不连续,为了提高检测精度,需要对最后的结果进行必要的人工干预。区域生长法是将具有相似性质的像素集中起来构成区域,从一些种子点开始并按照预先定义的一些标准,通过反复地增加像素到一个区域来分割图像。Su Zhang等[3]根据相邻血管图像之间的梯度信息结合数学形态学方法来减少区域增长的范围和限制生长区域边界。王胜军等利用梯度幅度变化的双准则区域生长方法来对血管进行分割。刘鑫等[4]提出一种基于两阶段区域生长法的肝内血管分割算法。基于特定工具和理论的分割方法主要是结合肝脏血管的先验结构来构造特定的数学模型,进而对血管进行分割。如Feti⁃ta等[5]提出一种基于灰度的高级形态学算子(SD⁃MC-connectioncost算子)来提取肝脏血管结构。Chen等[6]使用Graph-Cuts方法与一种迭代的更新区域的处理相结合的方法,来分割肝内血管中较为细小的血管。Goch等[7]提出用梯度向量流(GVF)和Frangis血管方法分割血管。Qian等[8]提出一种极坐标下强度剖面的肝脏血管分割方法。
图像增强是进行血管分割之前要进行的预处理的一个步骤,按照处理图像区域的大小图像增强可以分为全局增强和局部增强。全局增强是对图像的整体信息进行增强,这样容易导致局部细节的丢失,不适用于肝脏血管的分割。传统的局部增强方法有局部直方图均衡化、采用局部统计特性的噪声去除方法、对比度受限的自适应直方图均衡化等。由于肝脏内血管区域的灰度与周围组织的灰度较为接近,传统的局部增强方法不能获得较为满意的增强效果。Tomohiro Takagi[9]提出了构建模糊模型的数学方法,M.Wilscy[10]将该模型用于彩色图像的锐化增强并取得了较好的效果,基于此,本文提出一种基于模糊方法的局部增强算法来对肝脏图像进行增强处理。
1 基于模糊方法的局部增强
基于模糊方法的局部增强包含两个步骤:第一步是先计算领域内各个像素与中心像素的绝对差,然后利用隶属度函数来构建权重,最后对领域内像素值进行加权求和来得到该步骤的增强结果。第一步的主要目的是使图像中局部变化更加明显,为第二步的边缘增强做准备,其具体实现过程如下:
(1)计算当前像素与领域像素的欧氏距离:以3×3领域为例,设当前像素为(i,j),灰度值记为pi,j,则领域内像素到该中心像素的距离为(2)设计隶属度函数,并将其作为各像素的权重:


(3) 计算输出结果

第二步是以第一步的输出图像为处理图像,通过一个锐化参数λ和修正因子ε来实现对边缘的增强处理,其实现步骤为:
(1)计算领域内像素与中心像素的灰度差

(2)计算修正因子ε

(3)计算最终的输出结果

2 基于极坐标下强度剖面的血管增强
基于极坐标下强度剖面的血管增强方法:根据图像中每点极坐标下的临近点灰度分布曲线,分析各点极坐标下邻近点的灰度分布,可以看出血管结构在相关方向上至少含有一个窄方向带,且在窄方向带上灰度变化较小而灰度值较大(如图1所示)。
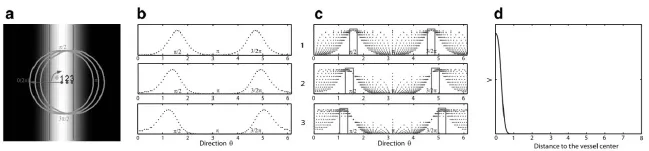
图1 基于极坐标下强度剖面的血管增强基本原理
其中(a)表示合成的血管剖面图像以及三个从血管中心到血管边界的点;(b)表示(a)内绿色圆环不同方向对应的灰度剖面;(c)沿着圆环不同方向采样对应的灰度变化,绿色矩形区域表示灰度变化较小而灰度值较大的区域;(d)Hessian矩阵特征分解获得的特征响应函数,横坐标表示到血管中心的距离。
由于明亮的血管,因此构造血管特征函数由灰度值变化小的密方向集群和局部亮结构组成,具体的血管特征函数构造如下:
1)灰度变化小的密方向集群
在血管所对应的灰度图像中,存在如下特征:沿着血管走向方向所对应的灰度其值变化较小,而其它方向特别是垂直于血管走向方向所对应的灰度其值变化较大。根据这一特征,对每一个像素点取一个以该像素点为中心的圆形(球形)的邻域。以三维情况为例,将球形领域N(x)沿着各个方向平分为个区域,计算每个采样点在各个不同方向上分别是方位角和仰角,与邻近点的灰度平均偏差平方:

上式中,h(u)是像素点x领域内的领域点相关位置上的滤波,可将滤波器h(u)分解为径向滤波和角度滤波,如图2所示: h(u)=hr(u)·hθ(u)=hr(r)·hθ(φ,ϕ),其 中
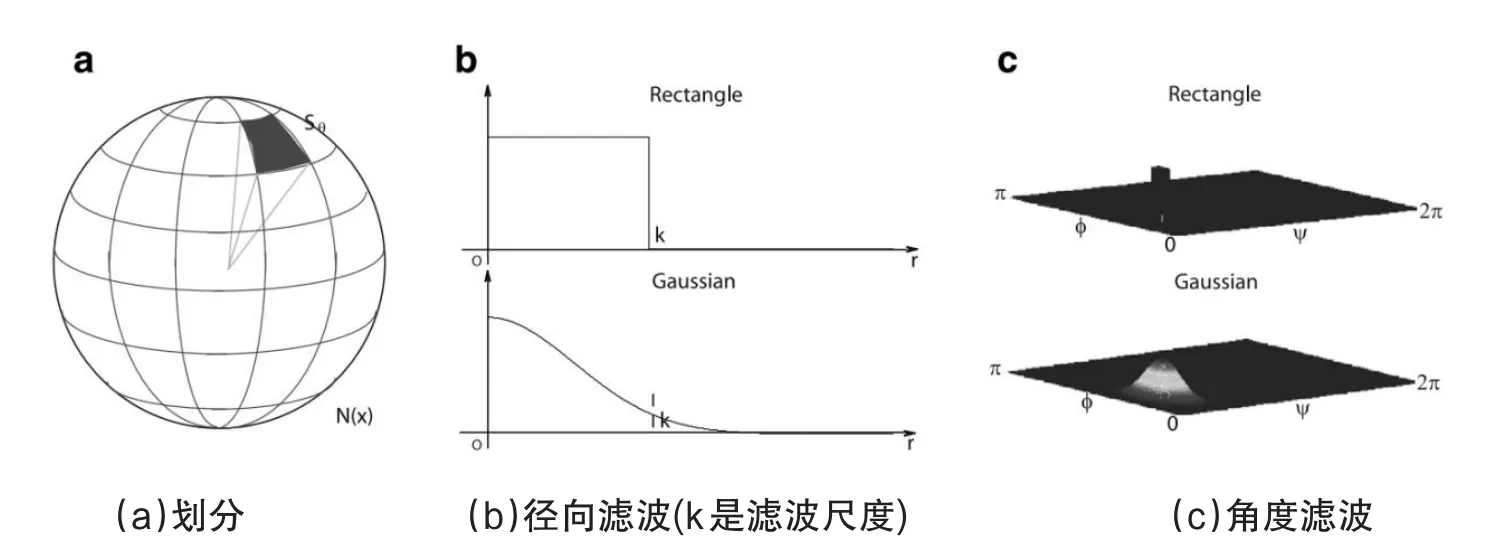
图2 滤波器h(u)的分解过程
径向滤波和角度滤波都是矩形函数,可以通过计算所有采样像素点所对应的sθ区域灰度的平均偏差平方来实现:

对于径向滤波和角度滤波都是矩形函数,滤波器的径向部分hr(u)如上图所示,滤波器的角度部分hθ(φ,ϕ)是二维高斯函数:

其中
D(φ,φi)=是在φ和φi的最小循环差。
对于离散化区域sθ,用 pv(x,θ)来表示较小的灰度变化:

其中c是归一化因子,β取常数。
最后用概率密度函数的熵来演化我们的估量函数,定义如下:

2)局部亮结构
对于CTA和MRA来说,血管图像的灰度分布是不均勾的,具体表现为血管上的像素所对应的灰度要比背景像素所对应的灰度更为明亮,在较小灰度变化的方向上血管也会包含更多高灰度值的像素点。因此对每一个像素点x,定义一个与其对应的明亮度函数:

其中s(d)是递增函数, μ(Isθmin(x)是最小偏差方向所对应区域内像素的平均灰度值, μ(Isθmax(x))是最大偏差方向所对应区域内像素的平均灰度值。
最后血管特征函数由估量函数和明亮度函数两部分组成,具体如下:

3 仿真实验
实验硬件设备为:英特尔3.2G双核处理器,8G内存;实验软件及其版本为:matlab2014。实验首先选取其中的一幅图像来进行对比验证,然后通过3维成像软件来展示最后的血管分割效果。
图3a是原始的肝脏图像,图3b是模糊增强后的肝脏图像,对比两幅图可以发现,增强后的肝脏图像中,血管与其他组织区域的对比度更加明显。图4a和图4b分别是对肝脏图像进行线性变换后的结果,由结果可以看到,增强后的图像含有的非血管噪音末枝更少,更有助于接下来的基于极坐标下强度剖面方法的血管区域提取。图5是最后的血管分割的不同角度观察到的三维显示效果,由图可以看出,该方法能够很好地分割出肝脏内的血管。
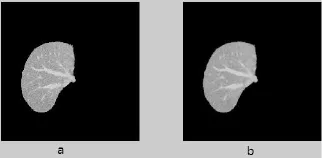
图3 原始肝脏图像及模糊增强后的肝脏图像
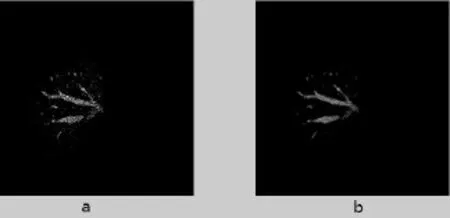
图4 原始肝脏图像和增强后的肝脏图像线性变换后的结果

图5 血管三维显示效果
4 结束语
基于模糊理论的局部增强算法是对图像整体进行增强,能够将血管区域与其他区域的差异变得更加明显。基于极坐标下强度剖面的方法是对管状结构的增强,能够用于提取血管区域。先通过模糊方法来增强血管区域能够进一步提高后期利用极坐标下强度剖面的方法来提取血管区域的准确度,实验结果也验证了该综合算法的准确性,而且该算法的计算量不大,实现简单,具有一定的应用价值。
