番木瓜采摘末端执行器的设计研究
2018-07-25张炳超夏红梅赵润茂刘孟夫郭英祺
张炳超,夏红梅,赵润茂,刘孟夫,郭英祺
(1. 广东省现代农业装备研究所,广州 510630;2. 华南农业大学,广州 510642)
0 引言
番木瓜又称为“万寿果”,具有很高的营养价值,有“百益果王”的称号[1]。随着我国人民生活水平的提高,人们对营养保健价值高、风味独特的番木瓜的需求量持续增长,番木瓜产业在我国有着广阔的发展前景[2]。人工采收番木瓜劳动量大、效率低、采摘成本高,极大地限制了番木瓜的产业化发展。机械采摘末端执行器在农业采摘机器人上的作用在于能够降低工人劳动强度和生产费用、提高劳动生产率和产品质量,保证果实适时采收,因而具有很大的发展潜力[3]。因此,设计一种适合采摘不同品种番木瓜的机械采摘末端执行器,提高采摘效率,降低采摘费用,有效解决农村劳动力欠缺、雇佣成本高的问题,对番木瓜产业体系的发展具有很好的现实意义。
目前,国内外采摘末端执行器主要模拟人工采摘原理,采用多手指结构,依据夹持方式和驱动原理,主要有刚性手指、柔性手指和欠驱动手指三大类型。日本大阪府立大学Kanae Tanigaki 和山形大学Tateshi Fujiura 等研制了一种由1个伺服电机驱动2个刚性手指的樱桃机械采摘末端执行器[4]。江苏大学刘继展等设计研发的番茄采摘末端执行器,由1对刚性夹持手指、激光聚焦透镜、力传感器、真空吸盘4部分相互协作,进行吸住、夹持、切割、分离动作,完成番茄的采摘[5]。意大利Muscato等研制的柑橘可弯曲柔性3指夹持末端执行器,该末端执行器的3指抓紧果实后,机械手向后移动拉紧果梗,通过腕部力传感器检测力信息来确定果梗位置,腕部旋转将果梗送入切割位置,由圆形锯将之切断[6]。加拿大MDROBOTICS公司与Laval大学合作,并由Gosselin等研制的欠驱动机器人手爪SARAH(Self-Adapting Robotic Auxiliary Hand), 该 3指机械手爪具有10个自由度,采用2个电机驱动,通过机械限位和弹簧实现无动力关节对被抓取形状的自适应[7]。上述末端执行器都是选取果实采摘中比较有代表性的,以单个果实采摘为前提而设计,对单个番木瓜果实采摘为目的的末端执行器设计有很多参考价值和借鉴意义。
1 番木瓜摘取末端执行器总体方案设计
1.1 基于欠驱动原理的方案设计
实现机构的自动化程度,有全驱动方式和欠驱动方式。全驱动方式下,安装1个电机保证末端执行机构的旋转运动,3个手指的夹持动作需要3个电机驱动。基于番木瓜机械采摘末端执行器尽量满足体积小、质量轻的设计需求,4个电机安装在机械手机构上,既增大了整个机构的体积和质量,又增加了机构的复杂性,无法达到上述要求。考虑结合欠驱动原理,利用1个电机来实现3个手指的夹持和手掌的扭转2个动作。
在采摘番木瓜果实的过程中,末端执行机构的动作需求是先稳定夹持住果实,然后再扭转果实将果柄扭断完成采摘动作。先夹持后扭转的动作顺序由一个电机实现,利用最小阻力原理,电机启动的初始阶段,设计末端执行机构的手指部件的夹持阻力小于机构旋转部件的扭转阻力,或者旋转部件处安装摩擦装置,摩擦装置可以通过调节摩擦力的大小,使得夹持阻力仍小于摩擦力,实现机构的先夹持动作。当末端执行机构的手指部件夹持住番木瓜果实后,夹持阻力短时间内迅速增大,远远大于摩擦力,此时旋转部件克服扭转阻力和摩擦力,实现机构的后扭转动作。
夹持式手部通常是由转动副和移动副配合构成,其手指的运动方式分为回转型和平移型,如图1所示。回转型手指的闭合和张开通过手指根部的回转运动实现,依据传枢轴的支点个数分为单支点和双支点两种,这类手指结构简单,但在夹持不同直径的水果时会产生较大的误差;平移型手指的闭合和张开通过手指平行移动,在夹持不同直径的果实时,不会造成中心位置的偏移,夹持误差较小,但是其结构比较复杂,加工精度要求较高。在番木瓜机械采摘末端执行器的设计过程中,比较两种手指运动方式的特点:一方面,手指的闭合和张开,回转型手指在夹持果实的过程中,与番木瓜表面相接触的手指指端位置在不断变化;相反,平移型手指则是与番木瓜的相对位置基本保持不变,更有利于对番木瓜的精确稳定抓取。另一方面,回转型手指绕支点做扭转动作,支点部位通常会安装扭簧来辅助手指的闭合和张开动作,如此便增加了电机的功率载荷。综上所述,夹持式手部机构决定选取平移型运动方式。
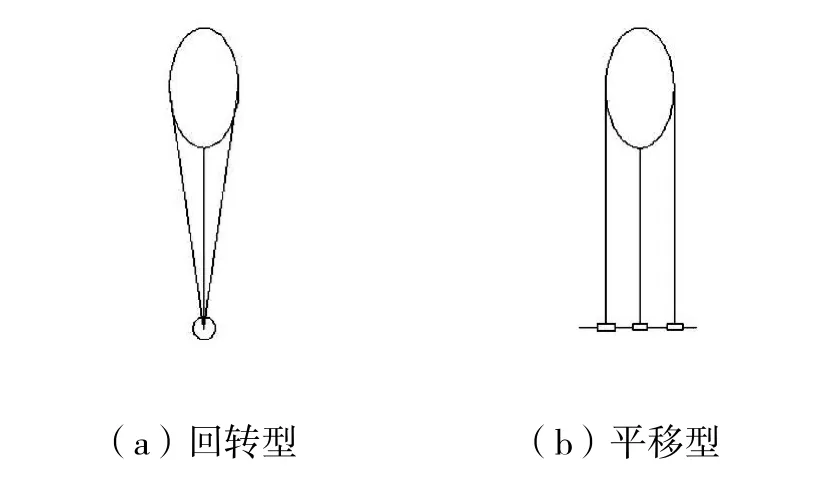
图1 夹持式手指运动方式
绳传动在机械传动中应用广泛,具有传动范围广、传动距离长等优点,绳索属于柔性体,其常用材料有棉绳、麻绳和钢丝绳等,为保证传动的精确性和牢固性,选用钢丝绳材料。绳传动方式下,电机通过联轴器连接一个绕线器用于因手指闭合和张开动作进行钢丝绳的卷绕行程。方案一绕线原理:手掌滑槽内安装符合手指平移行程的弹簧,钢丝绳在绕线器的带动下拉动手指进行闭合夹持动作。此种方案中存在的问题是:手指闭合夹持过程中,绕线器卷绕钢丝绳需克服弹簧因压缩变形产生的弹簧阻力,不仅增加了电机的附加载荷,而且确保手指张开弹簧的弹性系数也难以准确得到,如图2(a)所示。方案二绕线原理:利用两端钢丝绳实现手指闭合和张开的动作,末端执行器的初始状态,每个手指的第一段钢丝绳的两端分别固定在手指底部和绕线器上,第二段钢丝绳的一端首先卷绕绕线器一圈后另一端穿过手指底部再固定住。电机正转,第一段钢丝绳在绕线器的带动下进行手指闭合动作,同时第二段钢丝绳脱离绕线器的卷绕;电机反转,第二段钢丝绳卷绕在绕线器上进行手指张开动作,同时第一段钢丝绳脱离绕线器的卷绕。两端钢丝绳相互配合完成手指的闭合和张开动作,如图2(b)所示。通过对两种方案进行分析对比,决定选用方案二作为机械末端执行机构的绕线方式。
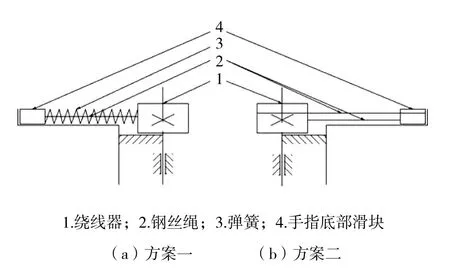
图2 绳传动钢丝绳卷绕原理简图
依据以上方案分析,制定末端执行机构欠驱动方案,如图3所示。整个番木瓜机械采摘末端机构由手指、手掌、定位及摩擦部件和固定电机部件等构成。电机正转,基于最小阻力原理,定位与摩擦部件和固定电机部件之间的摩擦力阻碍手掌部件旋转,手指部件平移闭合做夹持动作,手指平移达到极限位置后克服摩擦力,手掌部件开始旋转动作并扭断番木瓜果柄。电机反转,手指松开,将番木瓜安放入果实收集装置。基于欠驱动原理的整个机构动作过程中,两端钢丝绳相互配合,手指的平移夹持运动,手掌的旋转扭断果柄运动,都是在1个电机控制下完成的多自由度动作。
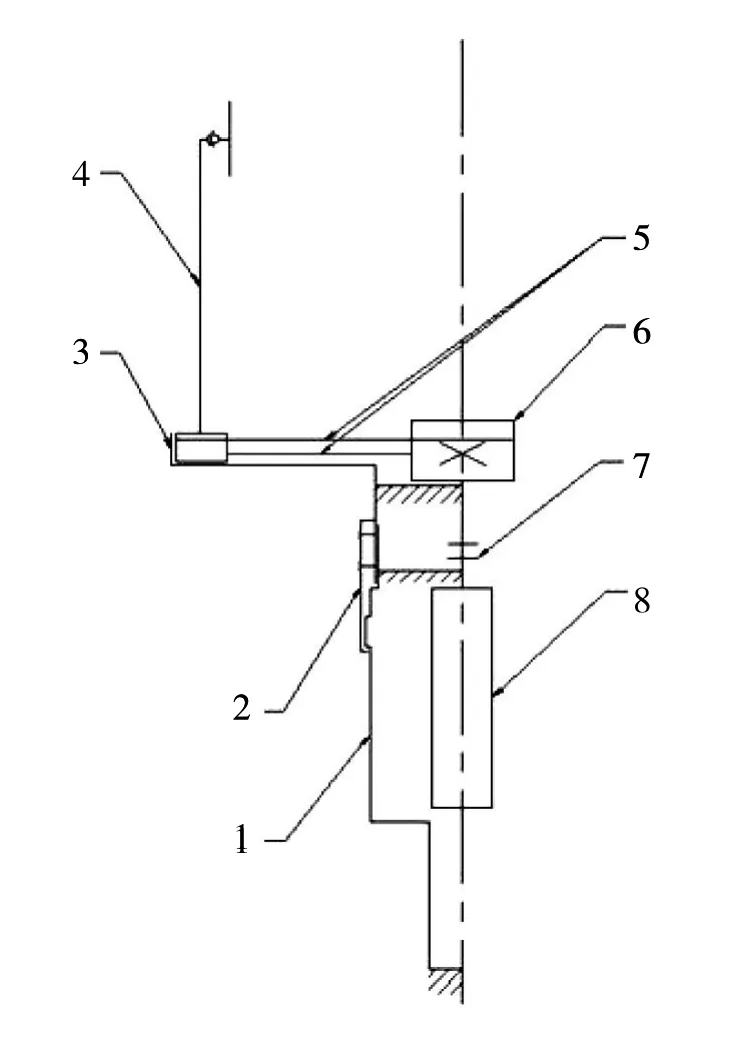
图3 机构简图
1.2 驱动部分设计
对番木瓜扭断摘取方式下的相关参数试验分析可知,扭断番木瓜果柄的夹持力在3.5~5.0 N之间,扭矩在1.2~3.0 N·m范围内,为此,选取一款Maxon型号的空心杯减速电机,如图4所示。

图4 Maxon的空心杯减速电机
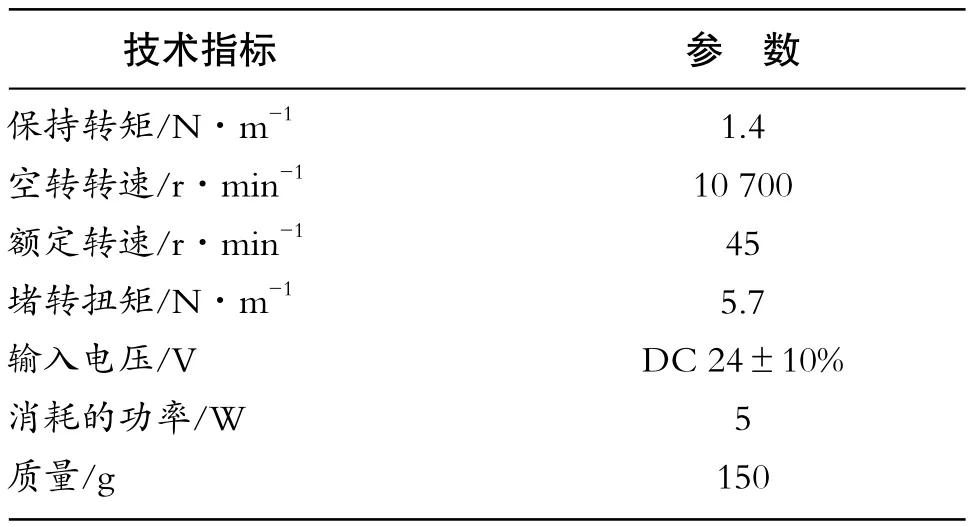
表1 Maxon空心杯减速电机的技术规格
该空心杯减速电机通过转动轴端部的3个螺纹孔与支座组件固定,其技术规格参数见表1。其中,保持转矩大于平均扭矩,最大输入电压达到24 V时的功率消耗仅为5 W,可以满足末端执行机构的功能需求。电机的外形尺寸见图4(b),质量仅为150 g,满足体积小、质量轻的要求。
1.3 机构主要尺寸参数设计
机械采摘末端执行机构的外形尺寸参数由番木瓜的外形特征及果实在树体上的生长特征所决定。番木瓜的横径值决定了手指部件在手掌滑槽内的平移行程量,番木瓜的下部高度值决定了手指部件的长度。考虑到绕线器、联轴器等零件在机构中的布局,最终确定手指长度为120 mm,手掌滑槽行程量为65 mm。结合平面指端部件在机械手指上的位置分布,确定手指的夹持直径范围为30~120 mm。利用空心杯减速电机的外形尺寸参数(图4(b)),确定机构的固定电机部件的空间尺寸(图3)。其它尺寸依据上述几个主要参数的尺寸而定,如图5所示。
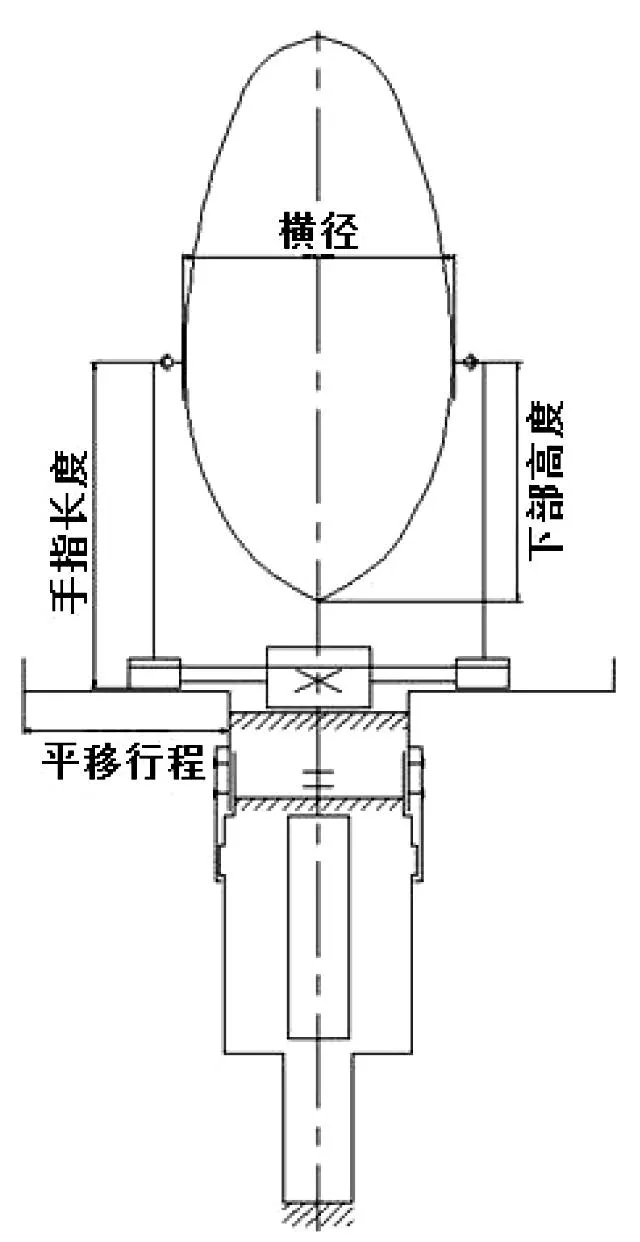
图5 末端执行器关键尺寸确定简图
2 末端执行机构结构设计
对番木瓜机械采摘末端执行器的机构设计决定选用SolidWorks三维软件,依据图3的机构简图,末端执行机构包括3指部机构、手掌机构、驱动机构、连接组件和支座组件。3指部机构相对手掌机构对称均布,指部机构与手掌机构构成移动副连接;指部机构下端两段钢丝绳与驱动机构的卷线筒固定连接;驱动机构安装在支座组件和手掌机构中部,手掌机构通过连接组件与支座组件连接。
2.1 材料选取
番木瓜机械采摘末端执行器的模具制作所选用的材料依据外部环境和材料性能而定。首先,摘取番木瓜的外部环境位于潮湿的果园地带,机械采摘机构与番木瓜接触,番木瓜的一种生物特性表现为:番木瓜表面被触碰后会流出白色液体,并且此液体具有腐蚀性;其次,机械末端执行机构安装于农业机器人的末端,要求具备体积小、质量轻的特点;最后,通过番木瓜扭断采摘参数分析,摘取果实需要的力相对较小,对机构材料的强度、刚度要求较小。综合考虑,通过查阅相关资料,确定选用密度小、绝缘性好、耐腐蚀、耐热、耐摩擦和安全性佳的PTFE聚四氟乙烯塑料材料。
2.2 指部机构
指部机构包括平面指端、手指和钢丝绳,如图6所示。①指部机构的平面指端包括活动指节换向钮、销钉、平面指节和指节垫片。指节垫片固定粘贴在平面指节与果实接触的表面上。平面指端活动指节换向钮上的销轴可相对手指上端孔转动,能实现平面指节相对手指转动方向任意可调,活动指节换向钮和手指通过螺钉固定连接。②手指下端通过螺钉固定连接钢丝绳的一端,手指下端中部开有上下2个矩形槽,分别用于2段钢丝绳(图9)穿过。
2.3 手掌机构和连接组件
手掌机构包括手掌、手指换向滚筒、销钉、滑槽端盖和螺钉,如图7(a)所示。手掌上端对称开有3条滑槽,手指的下端两侧矩形导向块与滑槽间隙配合,形成移动副连接。手掌滑槽外端部与销钉固定连接,销钉与手指换向滚动间隙配合形成转动副,手掌滑槽外侧与滑槽端盖通过螺钉固定连接。手掌滑槽内端部(图10)与销钉固定连接手指下端钢丝绳从2个销钉中间穿过,与卷线筒固定连接,手指下端钢丝绳绕过手指换向滚筒,从2个销钉中间穿过,按电机正转方向绕卷线筒一圈后与卷线筒固定连接。手掌下部圆筒内孔与电机支座上部圆筒的外圆柱面间隙配合,手掌与电机支座通过3个对称均布的连接组件形成转动副连接。
连接组件由防掉块、橡胶块和螺钉组成,如图7(b)所示。防掉块上部通过螺钉与手掌固定连接,下部侧面与支座组件的电机支座间夹有橡胶块,下部端面与支座组件的电机支座上端面配合,实现轴向定位约束。
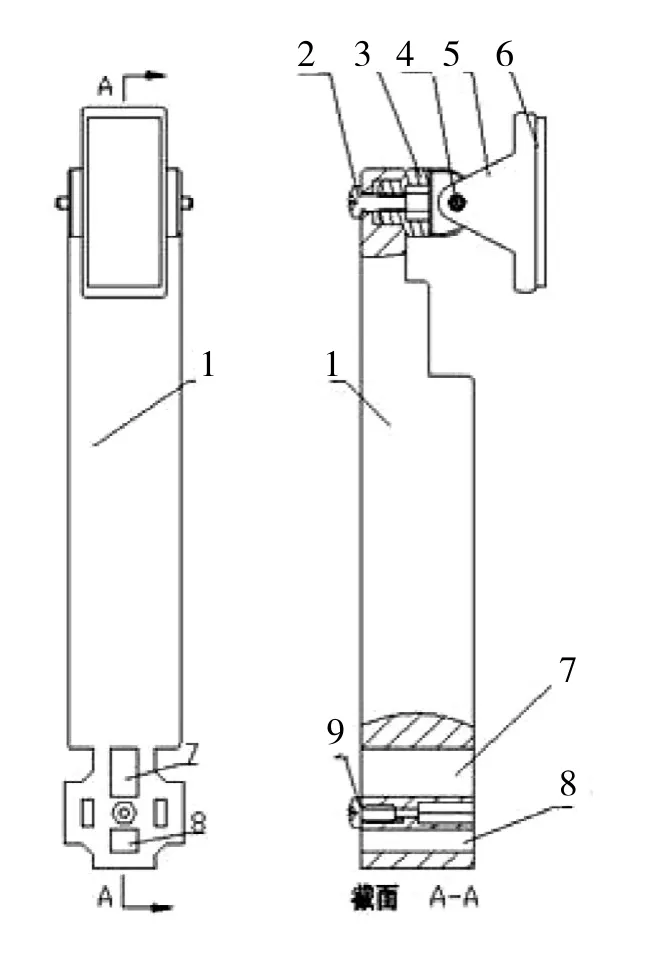
图6 手指和平面指端的结构示意图
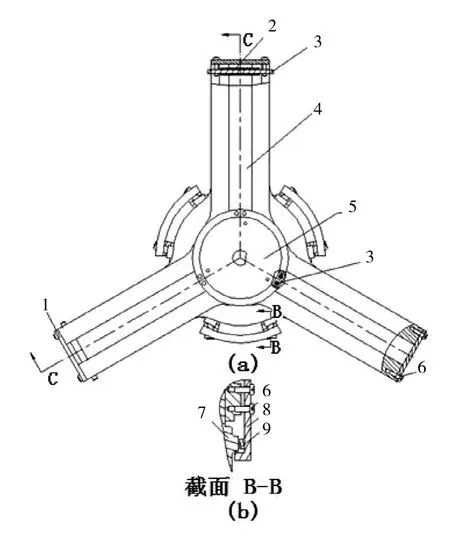
图7 手掌机构及连接组件示意图
2.4 支座组件和驱动机构
支座组件包括电机支座和连接支座,连接支座顶部与电机支座底部通过螺纹相连接,连接支座底部外接采摘机械手臂。驱动机构包括电机、联轴器、传动轴和卷线筒,电机固定安装于电机支座上,电机的输出轴通过联轴器与传动轴连接,传动轴顶端与卷线筒固定连接。对机构的剖视图,如图8—9所示。

图8 支座组件和驱动机构示意图
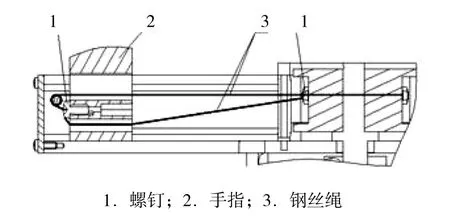
图9 手掌机构部分剖视图
2.5 整体结构和工作原理分析
末端执行器的整体机构,如图10所示。其工作原理为:
1)当末端执行装置处于初始状态时,手指处于手掌滑槽外端,平面指端已根据果实形状大小调节好活动指节换向钮方向,整个指端处于自由向下状态;
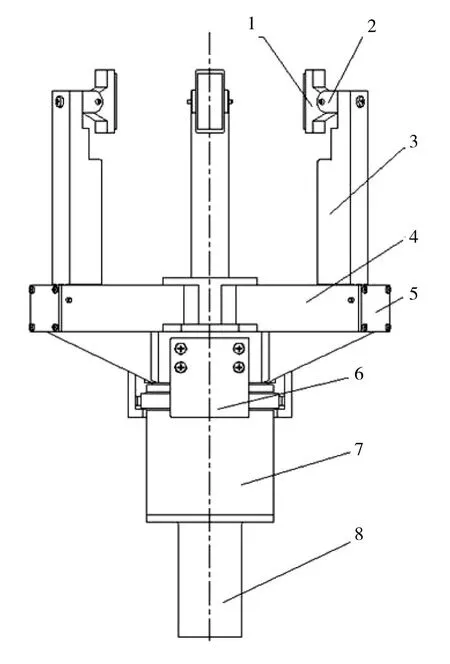
图10 末端执行器整体机构示意图
2)当采摘机械手检测到成熟的果实后,末端执行装置运动至果实处,此时,驱动机构中电机正转,电机通过联轴器和传动轴带动卷线筒转动,卷绕钢丝绳,钢丝绳带动指部机构沿手掌滑槽向果实中心平行移动,同时手指下端拉动卷线筒转动松开的另一段钢丝绳,平面指端自适应3点夹紧果实;
3)指部机构夹紧果实后,电机继续正转,钢丝绳停止卷绕,带动果实、指部机构和手掌相对电机支座转动,实现果实的扭转分离;
4)果实摘取后,电机反转,卷线筒反向转动卷绕另一段钢丝绳,钢丝绳拉动指部机构反向平行移动松开果实,同时手指下端拉动卷线筒反转松开的钢丝绳。
3 控制系统设计
3.1 功能需求分析
为了实现机械采摘末端执行机构的动作要求,基于欠驱动原理,通过1个电机的转动达到采摘番木瓜的目的。控制功能包括:①控制电机的正反转,完成闭合夹持和松开放置果实的动作;②调节电机的转速,满足手爪移动对番木瓜夹持的稳定性的同时控制摘取1个果实所需的时间,进而分析出较为合理的采摘效率。其控制示意图如图11所示。

图11 控制系统示意图
3.2 控制元件选取
通过分析空心杯减速电机的工作原理可知,改变电机的输入电压能够起到调节电机转速的目的。结合整个电路系统对控制性能的简易性及操作的灵活性要求,决定在电路中添加电位器,与电机成串联关系,起到分压作用。
出于对电位器的阻值和分压效果方面的综合考虑,选用B10K型号的直线式电位器,使得电位器旋转角度的大小和总阻值的变化成线性关系,实现电压值在电路中的均匀变化。
番木瓜机械采摘末端执行机构在夹持果体并扭断果柄的过程中实现的是电机正转动作,电机反转实现松开番木瓜果实,完成整个采摘过程。由此可见,在电路中安装一个双刀双掷船形开关实现电机的正反转,起到夹持及松开果实的作用。
3.3 电路板的设计
基于对番木瓜机械采摘末端执行机构的控制功能需求,设计电路原理图并制作了电路板,如图12所示。电路板的元器件主要由运算放大器、场效应晶体管、稳压器、二极管、电容和电阻等组成。其中,运算放大器选用LM324N型号的四运放集成电路,具有电源电压范围宽、静态功耗小、价格低廉等特点;场效应晶体管选用IRF3205S型号,拥有散热性能好、导通阻抗极低等优点;稳压器选用L7812CV型号的三级稳压集成电路,输出稳定性好,使用方便,输出过流、过热自动保护适用于各种电源稳压电路。
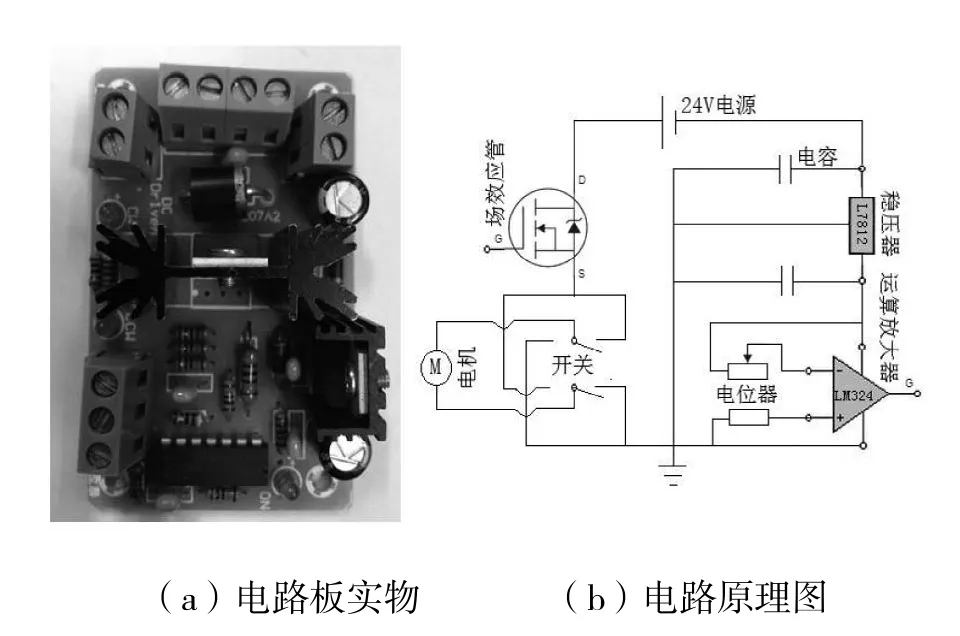
图12 控制电路原理图设计及电路板制作
3.4 工作原理
整个硬件控制系统的工作过程为:首先将电位器、开关和空心杯减速电机接入电路板,然后把24 V直流电源接入电路板,电路板上指示灯亮说明电路接通。打开船型开关,电路板上的另一个指示灯亮,电机开始转动,起到带动机械末端执行机构实现夹持和扭转动作要求,调节电位器旋钮,改变电机的转速,起到控制整个电路输出功率的作用。
4 结论
1)基于欠驱动原理的番木瓜机械采摘末端执行器机构方案设计:结合最小阻力原理的先夹持后扭转的动作顺序,平移型的夹持式手部机构运动方式,两段钢丝绳相互配合完成机构运动的传动方式和平面型指端抓取接触方式。
2)利用SolidWorks三维软件进行末端执行器的结构设计。将机构的整体结构分为3个指部机构、手掌机构、驱动机构、连接组件和支座组件。3个指部机构相对手掌机构对称均布,指部机构与手掌机构构成移动副连接;指部机构下端两段钢丝绳与驱动机构的卷线筒固定连接;驱动机构安装在支座组件和手掌机构中部,手掌机构通过连接组件与支座组件连接。
3)通过对控制系统的功能需求分析,选用B10K型号的直线式电位器和双刀双掷船形开关,设计并制作了包含运算放大器、场效应晶体管、稳压器和二极管等元器件的电路板。
