微小型飞行器发展现状及关键技术浅析
2018-07-24陈世适董晓飞
陈世适,姜 臻,董晓飞,周 兵,姜 鹏,宋 斌
(1.北京机电工程研究所,北京 100074;2.中国航天科工集团第三研究院,北京 100074)
1 概述
微小型飞行器(Micro Aerial Vehicle,MAV)是一个包含多种交叉学科的高、精、尖技术,其研究水平在一定程度上可以反映出一个国家的科技水平。由于微小型飞行器在现代军事和民用方面应用的巨大优势,得到了世界各国的极大关注和高度重视,成为当今先进国家竞相研究的科技前沿课题。目前微小型飞行器的研究还处于初级发展阶段,特别是厘米级微型飞行器的研究与设计,距离真正小巧化和实用化还有很大差距,但是微小型飞行器的诱人应用前景和使用价值决定了它未来广阔的发展空间。微小型飞行器的研制不仅是对其本身涉及问题的解决,更重要的是,微小型飞行器涉及的关键技术问题的提出和解决将有力地带动和促进相关技术领域的巨大发展。以微机械电子系统(Micro Electro-Mechanical System,MEMS)技术为基础的各种微型器件及系统的研究与设计近年来在国际上非常活跃,各种微小型飞行器相关的微型器件及系统的研究与设计以及微小型飞行器的研制都属于其中重要的内容。另外分布式远程打击、大规模集群作战有着巨大优势,利用智能控制实现群体能力的无限扩展,将作战要素分布化,以低成本的个体组成强大的作战群体,可以解决由于敌高价值时敏目标不断提高机动及隐身能力,以及防御系统不断升级导致的传统武器装备执行探测及打击任务效费比不高的问题。因此,对于我国而言,微小型飞行器技术的研究有着深远的战略意义,需要紧跟技术发展前沿,充分发挥微小型飞行器的优势,更多更广地应用于军事及民用领域。
2 微小型飞行器分类
自20世纪90年代开始,国内外各大科研机构广泛开展了对微小型飞行器本体及其子系统的研究和开发,并研制了一系列原理性样机[1]。至今有关小型飞行器与微型飞行器的具体划分仍不明确,可按照美国国防预研局(Defense Advanced Research Projects Agency, DARPA)对微型飞行器所提出的尺寸与质量设计要求进行划分,即最大尺寸15cm,最大质量100g;另外国际上比较流行的分类方法为按照飞行模式和总体结构布局方案进行划分:微小型固定翼飞行器、微小型旋翼飞行器、微小型扑翼飞行器三大类型[2]。
2.1 微小型固定翼飞行器
微小型飞行器最初的设计是从固定翼式开始研究[3]。微小型固定翼飞行器的主要特点是飞行速度快,负载能力大,设计结构相对简单,巡航作战半径大;但由于有最小速度限制,因而机动灵活性差,起飞和降落比较困难。
典型代表为美国AeroVironment公司的Black Widow、美国Sanders公司的Micro Star、美国斯坦福大学林肯实验室的侦察鸟、海军MLB公司的Trochoid等[4,5]。

图1 微小型固定翼飞行器典型代表:Black Widow(左上);Micro Star(右上);侦察鸟(左下);Trochoid(右下)
2.2 微小型旋翼飞行器
微小型旋翼飞行器与微小型固定翼飞行器相比,其最大的优点是:能够实现垂直起降和空中悬停,在比较狭小的空间或复杂地形的地区进行快速机动。根据旋翼式升力系统的特点,其旋翼结构布局有单旋翼式、双旋翼垂直分布式、四旋翼水平分布式等型式。四旋翼式的飞行器因其结构布局新颖、飞行方式独特引起了各国微小型飞行器研究人员的广泛关注。
典型代表为美国Lutronix公司的Kolibri、德国IMM公司的微型直升机、美国斯坦福大学的Mesicopter等。
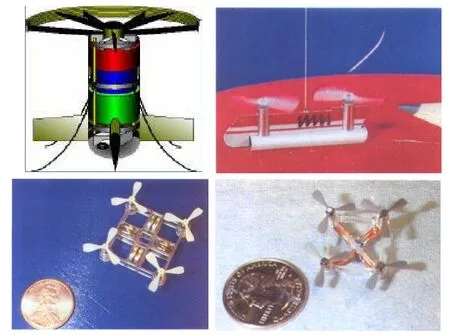
图2 微小型旋翼飞行器典型代表:Kolibri(左上);IMM微型直升机(右上);Mesicopter(左下与右下)
2.3 微小型扑翼飞行器
微小型扑翼飞行器是一种全新的飞行器设计结构,因其机械扑动很容易产生疲劳断裂,目前只适用于微小型飞行器的设计。与前两种结构微小型飞行器相比,微小型扑翼飞行器因其质量轻、体积小、噪音弱、隐蔽性能好等特点,既可以实现如同微小型旋翼飞行器的垂直起降、空中悬停、倒飞、侧飞,还可以像微小型固定翼飞行器那样实现快速高飞、长距离巡航等,是目前微小型飞行器的研究热点。
典型代表为美国加州理工学院的Micro Bat、美国佛罗里达大学的柔性翼微小型飞行器、美国哈佛大学的RoboBee、荷兰戴夫特技术大学的DelFly Explorer等。
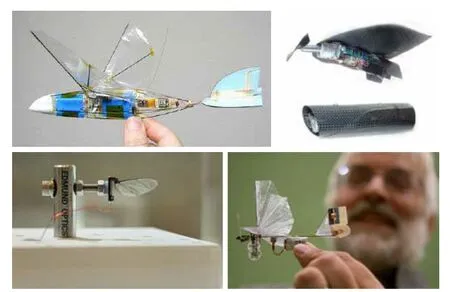
图3 微小型扑翼飞行器典型代表:Micro Bat(左上);柔性翼(右上);RoboBee(左下);DelFly Explorer(右下)
3 国外微小型飞行器发展现状
目前,微小型飞行器主要朝着两个不同目的的方向发展,即研究性与实用性。
3.1 研究性微小型飞行器
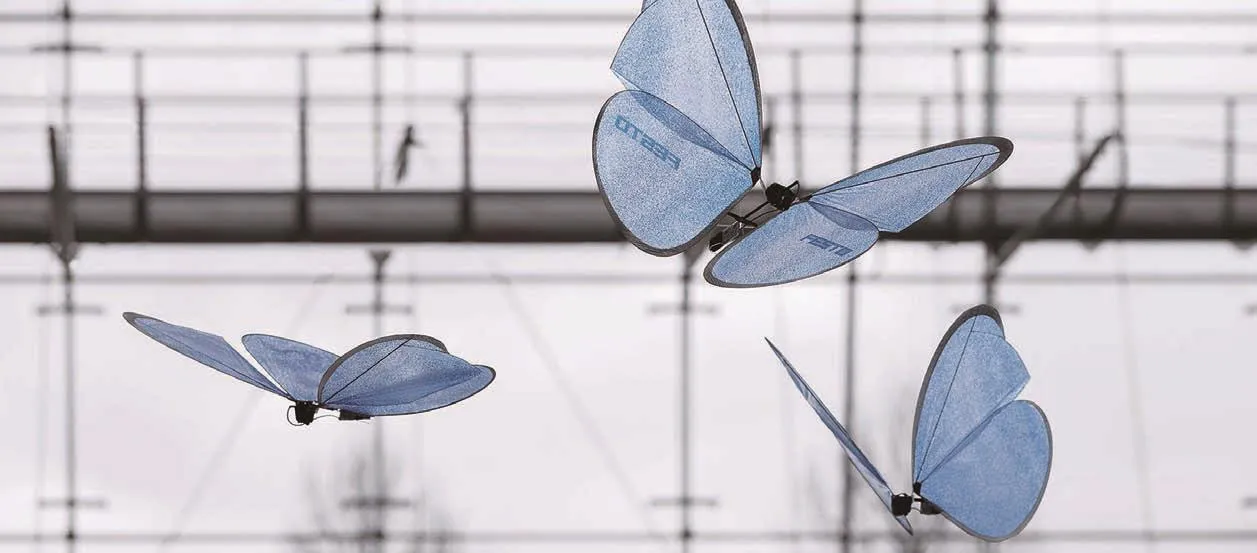
研究性微小型飞行器主要以大学和科研机构为研究力量,仍然追寻DARPA于1996年讨论的“15cm尺寸”目标,并研制出各种各样探索性的微小型飞行器。但目前这些探索性微小型飞行器多数仅限于飞行表演与技术摸索,携带设备载荷的能力很低,甚至不携带任务载荷,同时需要人为遥控进行稳定飞行。近几年,已有研究机构成功研制出尺寸略大,但具有一定自主飞行控制与导航能力的智能微小型飞行器,如荷兰代尔夫特技术大学已研制出新型的28cm微小型扑翼飞行器DelFly Explorer,并实现自行起飞和室内自主避障飞行;美国伊利诺伊大学香槟分校航空机器人与控制实验室最近也研制出世界上最先进的仿蝙蝠扑翼无人机Bat Bot,其内部搭载微处理器与6自由度惯性测量单元实现自主飞行;德国FESTO公司也研制出多种仿生微小型扑翼飞行器,包括仿生鸟、仿生蝴蝶与仿生蜻蜓,它们除了能够实现单个飞行器自主飞行外,还能进行自主协同编队飞行。

图4 具备自主飞行能力的微小型扑翼飞行器:DelFly Explorer(左上);Bat Bot(右上);FESTO公司的仿生鸟(左下)与仿生蝴蝶(右下)
此外,近几年仍有一大批高校科研人员努力探索,寻找新的突破口,成功研制出蜜蜂、苍蝇大小的超微型飞行器,如美国加州大学伯克利分校研制出25mm大的微机械飞行昆虫(Micromechanical Flying Insect)、宾夕法尼亚大学研制出硬币大小的Piccolissimo 3D打印超微型旋翼飞行器、哈佛大学研制出30mm大的RoboBee仿生蜜蜂机器人,但是目前它们只能无控制地“飞行”一小段距离或悬停很短时间。未来对研究者们的最大挑战是如何通过集成微处理器和高能量密度轻型电池使得超微型飞行器更加自动化同时实现更长续航。
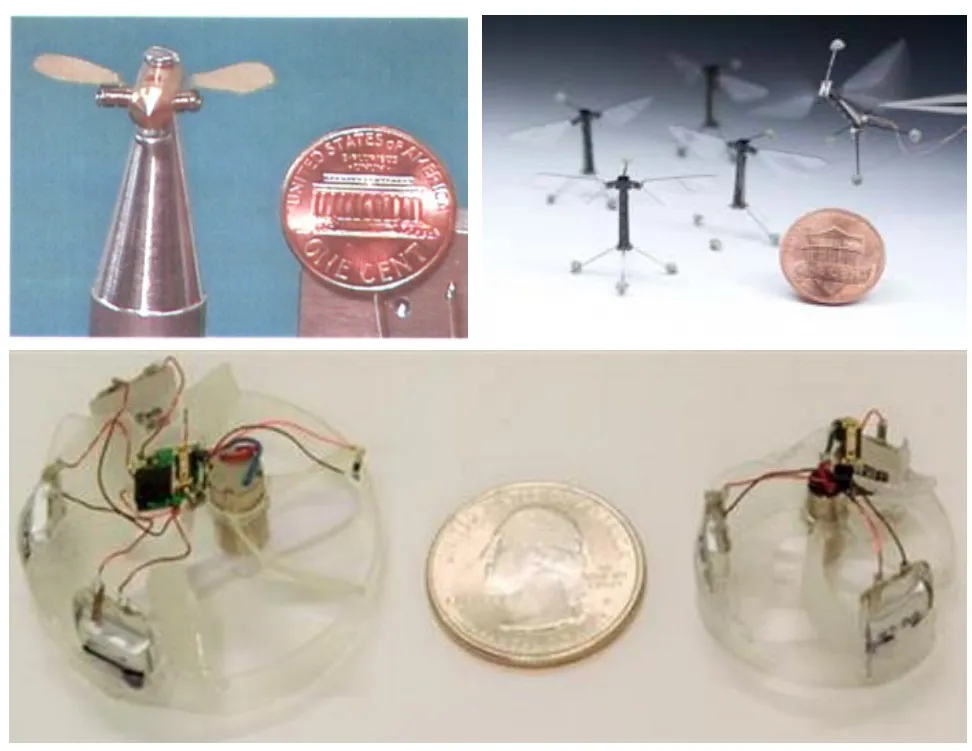
图5 超微型飞行器:微机械飞行昆虫(左上);RoboBee仿生蜜蜂机器人(右上);Piccolissimo 3D打印旋翼飞行器(下)
3.2 实用性微小型飞行器
除了上述探索性微小型飞行器的研究外,另一类是实用性微小型飞行器的发展。早期DARPA和美国军方同时把注意力投向军事实用性[6]。自2001年起,美国国防部将MAV列入先期概念技术演示计划。由于军事上需求较迫切,2006年,在众多探索性微小型飞行器中,美国DARPA和军方选择一些实用可行性更大、但尺寸也更大的微小型飞行器作为微小型空中侦察装备,进入演示验证和战场上试用。
美国AeroVironment公司成功研制了黄蜂系列(WASP)微小型飞行器,其中WASP I型翼展为330mm,WASP II型翼展为410mm。WASP I型由于采用了新的多功能结构电池,电池和机翼结构融为一体,在未装自动控制和任务设备情况下(170g),遥控持续飞行1h47min,创造了当时MAV的飞行记录。该公司还研制了由燃料电池驱动的大黄蜂(Hornet)微小型飞行器,翼展为380mm。2006年12月,美国空军和海军陆战队选择美国AeroVironment公司研制的黄蜂系列微型无人机中较大尺寸的WASP II型(质量为273g)和WASP III型(质量为430g),计划作为美国战场空中目标侦察系统进行研制。

图6 黄蜂(WASP)MAV(左) 和大黄蜂(Hornet)MAV(右)
美国霍尼韦尔公司为DARPA研制了一种与之前的微小型飞行器完全不一样的涵道风扇式MAV,涵道直径为330mm,高约为600mm,质量约为8kg,由于采用多油箱汽油发动机驱动,承重大,并且可长时间悬停。2006年,DARPA将其正式列入军事用途的先期概念技术验证计划。同年,该型MAV被部署到伊拉克进行试用,用于从空中识别临时爆炸装置(IED)。相类似的微小型涵道风扇式飞行器还有美国Allied Aerospace公司研制的iSTAR、美国西科斯基飞行器公司研制的Cypher、法国伯蒂技术公司研制的Hovereye等。
除了上述用目标侦察与信息感知功能的实用性微小型飞行器外,近几年美国DARPA与军方也致力于微小型精确打击武器的研究,主要包括微小型精确制导枪弹与导弹,例如美国雷声公司研制的40mm直径长矛导弹[7]、美国海军空战中心研制的56mm直径的长钉导弹、美国桑迪亚国家实验室研制的12.7mm激光制导枪弹、美国特里蒂尼科学与成像公司研制的12.7mm光学制导枪弹。

图7 微小型涵道风扇式飞行器:霍尼韦尔公司研制的MAV(左上);iSTAR(右上);Cypher(左下);Hovereye(右下)

图8 长矛微型导弹(左上、右上)与长钉微型导弹(左下)以及微型制导子弹(右下)
3.3 微小型飞行器集群编队技术发展
随着微小型飞行器单机功能逐步趋向成熟,以及自主集群飞行技术的发展,集群协同编队成为了微小型飞行器新兴的研究方向之一。目前已有多家单位实现了多旋翼微小型无人机集群编队的实际飞行技术验证,例如美国宾夕法尼亚大学GRASP实验室研制的飞行机器人通过协同编队实现货物搬运、精细农作、仪器检修、乐器表演等功能;英特尔娱乐无人机业务部门采用500架微型旋翼无人机完成了灯光秀表演。
近几年,美军也在推进微小型飞行器从单机功能拓展向更复杂的集群协同作战的方向发展。微小型无人机编队或集群可以将单个完备作战平台所具备的各项功能分散到大量低成本、功能单一的作战平台中,通过大量异构、异型的个体来实现原本复杂的系统功能,系统的倍增效益将使无人机集群具备远超单一平台的作战能力。
2016年5月,美国空军正式提出《2016—2036年小型无人机系统飞行规划》,希望构建横跨航空、太空、网空三大作战疆域的小型无人机系统。基于无人自主技术,美军提出了利用微小型无人机集群作战的模式,以降低作战成本,提升作战行动的灵活性。典型项目有DARPA的小精灵无人机,计划研制一种部分可回收的侦察和电子战无人机集群,从敌方防御范围外的大型飞机(轰炸机、运输机、战斗机等平台)上投放,利用无线网络实现通信与协同,通过影响导弹防御、通信与内部安全,甚至利用电脑病毒袭击敌方数据网络等方式压制敌方。同时,美国海军研制出一种可用于集群作战的蝉微小型无人机,并进行了飞行试验。美国海军希望未来可实现在25min内投放成千上万架蝉微小型无人机,覆盖4800km2的区域。此外,美国海军还在低成本无人机群技术(LOCUST)项目下开展了相关技术研究,利用小型筒式发射北美狼袖珍无人机组成机群压制对手。
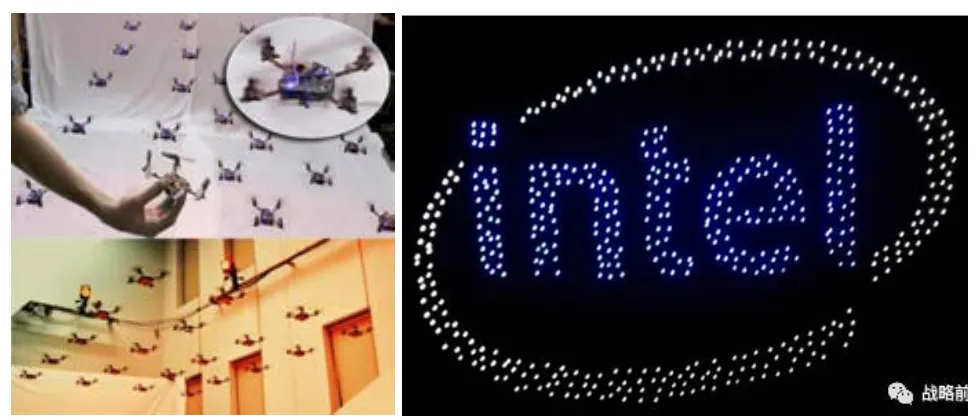
图9 美国宾夕法尼亚大学研制的无人机进行协同编队飞行(左);英特尔公司采用500架无人机编队组成的复杂灯光图案(右)

图10 无人机编队协同作战构想图(左上);采用轰炸机投放大量小精灵无人机(右上);折叠展开后的蝉微小型无人机(左下);筒式发射的北美狼袖珍无人机(右下)
2016年10月,美军在加利福尼亚州中国湖试验场进行了规模最大的一次无人机蜂群飞行演示,3架F/A-18F超级大黄蜂战斗机在马赫数0.6的速度下,利用外挂的投放装置连续投放103架灰山鹑微小型无人机。这些无人机未进行预编程,但机间可以互通,且“共享一个分布式大脑”,同时蜂群还与多个地面站通信,展现出集体决策、自修正和自适应编队飞行能力,自组织完成了地面站设定的4项任务。该项目完美诠释了无人机集群的三大特点:无中心化、自主化、自治化。

图11 灰山鹑微小型无人机(左);F/A-18F战斗机投放灰山鹑(中);地面站显示正在执行任务的灰山鹑无人机集群(右)
4 微小型飞行器关键技术
从微小型飞行器的研究现状来看,虽然已经取得了相当的技术成果,积累了一定的经验,但是总的来说,微小型飞行器还处于试验阶段,离实用化还有一定的差距,其发展面临着来自诸多技术领域的严峻挑战[8]。
4.1 低雷诺数下的空气动力学分析技术
4.1.1 低雷诺数空气动力学不利影响特性消除技术
相比于常规大型飞行器,微小型飞行器的空气动力学特性有较大不同。常规大型飞机的雷诺数很大,约为106~108左右,空气的粘性效应可以忽略。而微小型飞行器由于尺寸微小,飞行速度较低,所以雷诺数很小,通常在104~105左右。低雷诺数下,空气的粘性效应显著,导致一些不利影响,主要表现为阻力增大,升阻比减小。Muller的研究表明当雷诺数低于105后,升阻比将迅速恶化,如图12所示。
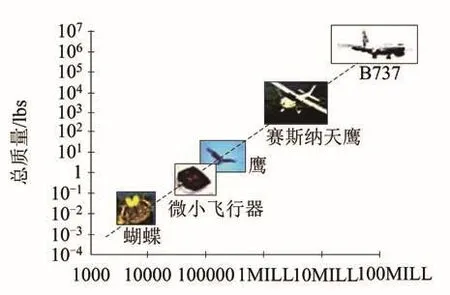
图12 微小型飞行器、常规飞机、鸟与昆虫的飞行雷诺数
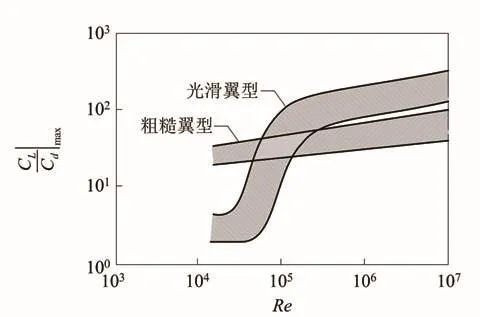
图13 最大升阻比和雷诺数的关系
微小型飞行器的升力系数随攻角呈显著的非线性变化,有时气动力和力矩甚至出现“滞回”现象。微小型飞行器机翼上的附面层对迎角变化异常敏感,飞行器姿态的微小变化很可能会导致机翼附面层分离,形成层流分离泡,如图14所示,使机翼气动特性变坏。另外,微小型飞行器的飞行速度和风速处于同一量级水平,风速的变化会造成雷诺数的剧烈波动,使按常规理念设计的飞行器气动性能、稳定性和操控性特性急剧恶化。
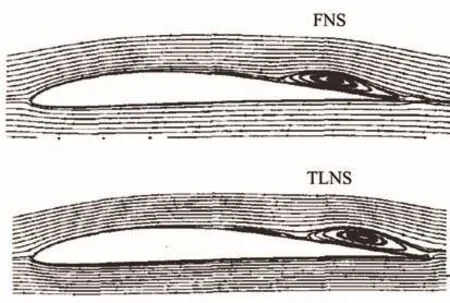
图14 绕Eppler387翼型层流FNS和TLNS计算的翼型后缘分离泡
除了低雷诺数以外,非定常空气动力也是微小型飞行器特殊的基础问题。鸟类扑翼飞行与昆虫扑动飞行过程中存在明显的低雷诺数非定常空气动力问题,其为完全不同于目前飞机飞行的新概念空气动力学。斯德鲁哈尔数(St数,Strourhal)为常被用来表示扑翼飞行上的非定常气动特征[11],

其中f为扑动频率,h为扑动最高点到最低点的距离,U为来流速度(飞行速度)。St数定义了扑动速度相对于来流速度的大小。较大的St意味着扑翼大幅度高频扑动,来流速度相对较小;反之扑翼小幅度低频扑动,来流速度相对较大时,St较小。
科学家通过自由飞试验、模型风洞试验以及数值模拟技术,对昆虫、鸟等的扑翼飞行问题进行了大量研究,提出了扑翼低雷诺数下获得高升力的多种非定常飞行机制,分别是Wagner效应、Weis-Fogh效应、延迟失速效应、Kramer效应、尾迹捕获效应和附加质量效应。有人曾想把研究固定翼的非定常流动理论运用于扑翼,该理论假设机翼表面和尾流区的涡无限薄,但这一假设对低雷诺数、粘性影响大和大幅度的扑翼非定常运动并不适用。
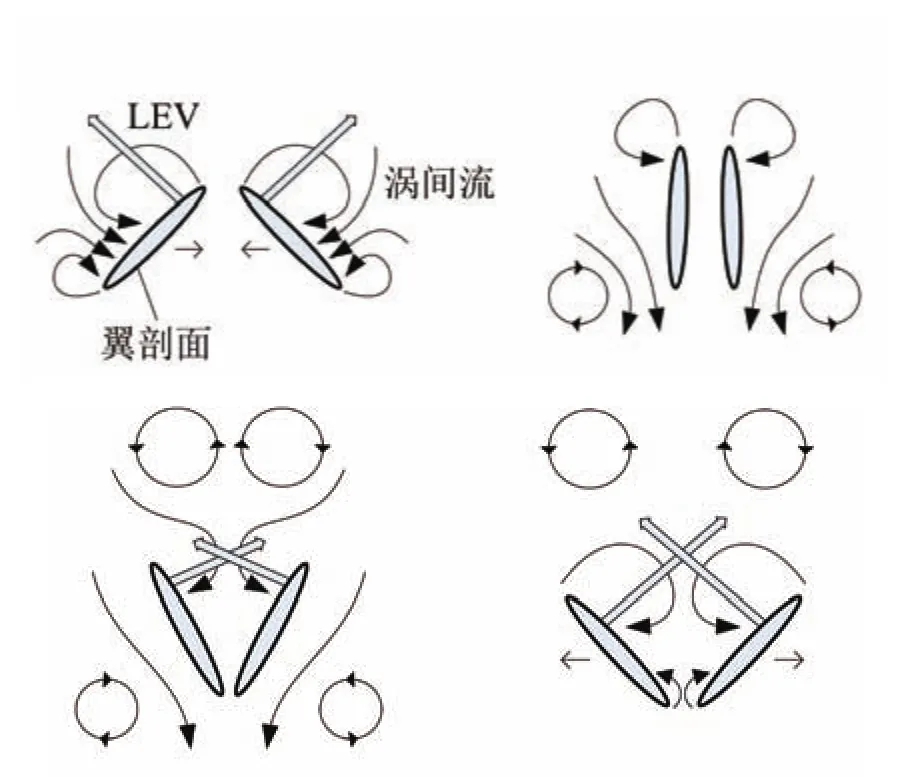
图15 Weis-Fogh效应机制示意图
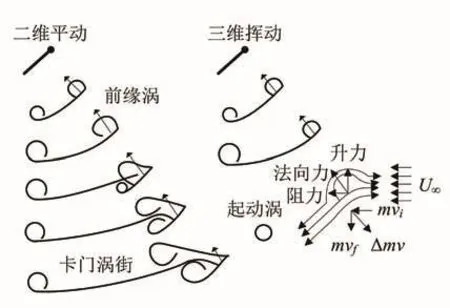
图16 2D与3D延迟失速现象
近几年,已有部分在低雷诺数下提升微小型飞行器升阻比的研究取得初步进展,如优化气动外形和机翼形状,采用各种有效的增升、减阻措施;利用非定常外部激励效应(如扰流片、吹吸气、动壁效应等);采用仿生运动学方法等。但是总体而言,相关研究仍处在探索试验阶段,并未形成成熟的系统理论用于设计指导,距离完全弄清楚低雷诺数非定常气动特性、稳定性和控制性能,实现工程实用化还需要较长的时间。
4.1.2 低雷诺数空气动力学数值分析与风洞试验技术
针对微小型飞行器低雷诺数流动特点,自20世纪90年代,气动设计人员在低雷诺数计算分析和试验验证方法上开展了持续而深入研究。由于传统的定常可压缩N-S方程的数值方法用于不可压、低马赫数或低雷诺数流场时会面临收敛速度慢、不稳定和精度低的所谓“刚性”问题。引起这一问题的根本原因在于低速时控制方程系统矩阵特征值对应的特征波速相差太大[11]。比如,定义为最大特征值与最小特征值之比的条件数CN,

其中C为声速、μ为对流速度。随着马赫数的减小,CN数将越来越大,导致流场计算收敛越来越困难,甚至无法计算。目前主要的措施是通过时间导数预处理方法,对可压缩N-S控制方程时间导数的预处理,使方程系数矩阵的特征值保持在同一量级而不至于相差太大,解决了低速时系数矩阵的刚性问题,使得传统的可压缩流方法能够拓展用于求解微小型飞行器的低速低雷诺数/不可压流场。但是以往计算流体力学的研究主要集中在常规飞行器的定常流场计算,非定常流场的计算研究刚刚逐步兴起。但针对低雷诺数非定常流的研究仍然不够深入和全面。在离散格式、求解精度、动态网格处理、湍流模型等方面,低雷诺数非定常空气动力学的计算方法研究仍面临不小的挑战。
除了理论或数值计算方法以外,风洞试验方法也是一种有效、高精度的微小型飞行器气动特性分析手段,尤其是低雷诺数扑翼微型飞行器,其非定常气流分离情况复杂而不稳定,通过风洞试验才能最终确定低雷诺数微型飞行器的气动特性和最终选择。由于当雷诺数很低时物面边界层对来流湍流度十分敏感,为了研究低雷诺数微小型飞行器气动特性,需研制专用的低湍流度风洞。同时,由于微小型飞行器的气动力较小,针对微小型飞行器风洞试验的微型天平、测压仪器和外部流场显示设备也需同步研制,为准确分析微小型飞行器低雷诺数与非定常气动特性提供强有力的保障,见图17。

图17 微小型飞行器专用风洞与微型天平
4.2 微小型动力装置和能源技术
微小型飞行器对其动力和能源系统的主要要求是:质量轻、体积小;能量和功率密度高,可以为飞行器提供足够的动力;振动小,不干扰任务设备正常工作;噪音小,以保证飞行器的隐蔽性;动力系统应易于启动,可靠性高[12]。从统计数据来看,微小型飞行器质量分布中最大的一部分就是动力系统,约占48%左右。动力和能源系统尺寸和质量较大、效率较低是限制微小型飞行器尺寸和质量难以缩减、性能难以提升的重要方面。
现有微小型飞行器形式主要有固定翼飞行器、旋翼飞行器和扑翼飞行器。根据不同类型飞行器的动力需求,可以采用多种类型的能量来源、动力装置和执行装置,如图18所示。
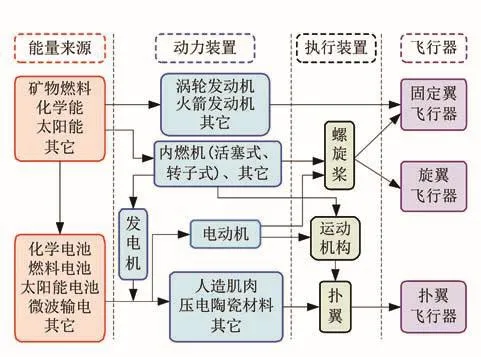
图18 微小型飞行器动力能源装置
微小型飞行器的动力装置主要有微小型内燃发动机、微小型涡轮喷气发动机、微小型电动机、微小型火箭发动机等。微小型内燃发动机和微小型涡轮喷气发动机都具有结构复杂、精度高、制造难度大、不易微小型化的特点,一般用于稍大一点的微小型飞行器上,但目前微型内燃机的效率还比较低,热效率只有5%左右,功率密度不过1W/g,燃料消耗量大约0.3~0.5g/W·h,而且还存在难以节流、噪音大、可靠性低等问题。微小型电动机与微小型火箭发动机则结构简单、易于制造、较易实现微小型化,一般用于尺寸更小的微小型飞行器上。但是微小型电动机具有重复多次使用的特点,适用的范围与领域更加广泛,而微小型火箭发动机仅能单次使用,多数用于微小型打击武器上。此外,往复化学肌肉、电致伸缩人造肌肉、弹性动力和热电动力新技术目前也在研究中[13]。
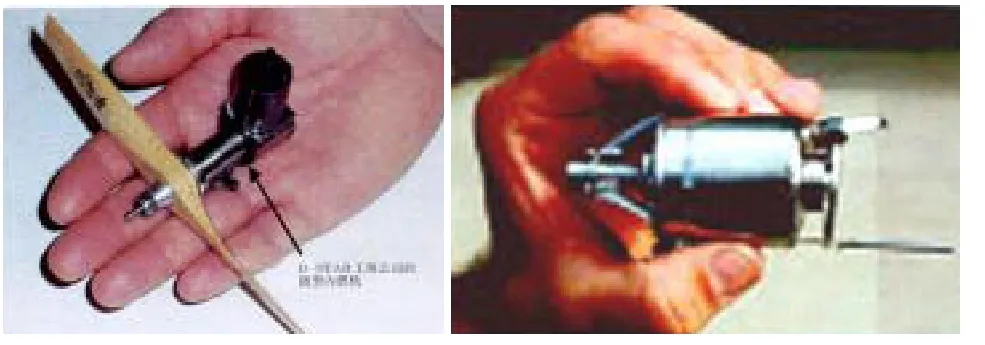
图19 D-STAR公司的微型内燃机(左)与斯坦福大学的微型涡轮发动机(右)
作为动力装置的能量来源,微小型飞行器对动力能源的要求是能量密度高、体积小、质量轻、总能量大,以保证微小型飞行器的飞行速度和续航时间。现在微小型飞行器的能源主要有:矿物燃料、电池能源和太阳能等。矿物燃料能量密度高,价格便宜,但存储较困难。电能源是微小型飞行器上必不可少的能源。除了推进系统的微电动机,微小型飞行器上的控制系统、信息传输系统都需要电能驱动。微小型飞行器上常用的电能源有蓄电池、一次性化学电池和燃料电池,其中锂离子电池为目前微小型飞行器最常用的电能源,但锂离子电磁的能量密度大约只有0.2~0.3W·h/g,部分采用锂离子电池作为电源的MAV型号如表1所示。总体而言,在整个微小型飞行器重量中电池部分所占比例很大(约30%~60%),若采用固态氧化物燃料电池,其能量密度可比普通电池大约高出2~4倍,但总能量和能量释放率也仍有待提高。
由于太阳能电池能量转换效率低且微小型飞行器表面积不大,因此能够提供电能有限,通常将其作为辅助电源,一般是将太阳能电池膜覆盖在机翼表面上以节省内部空间,同时能够最大程度降低对飞行器气动外形的影响。
此外,关于微小型飞行器电能源的供应管理和节能问题目前仍有待深入研究。
4.3 抗干扰稳定技术
微小型飞行器由于尺寸小、飞行速度低、质量和转动惯量都很小,导致其抵抗空气扰动的能力很弱。
无人机常规的比例-积分-微分(PID)控制方法己不适用,必须根据不同的微型飞行器类型、甚至不同的特定MAV对象,来建立智能飞行控制方法。常见的一种微小型飞行器稳定控制方法——在线神经网络动态逆自适应控制方法(如图20所示)。
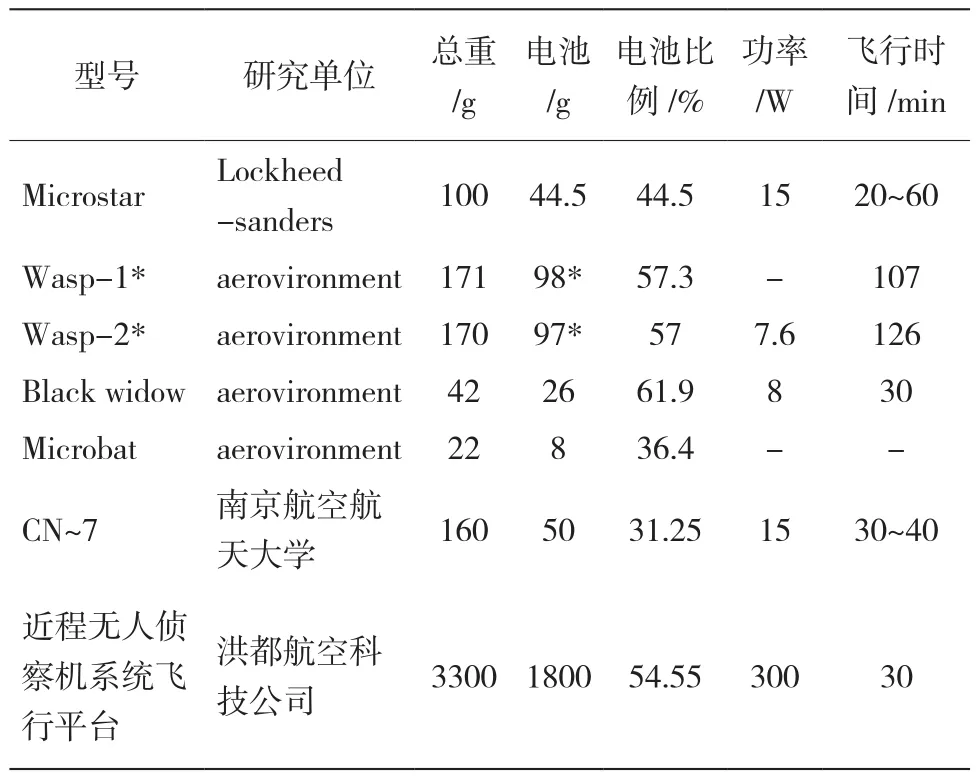
表1 以锂离子电池为动力的MAV基本情况
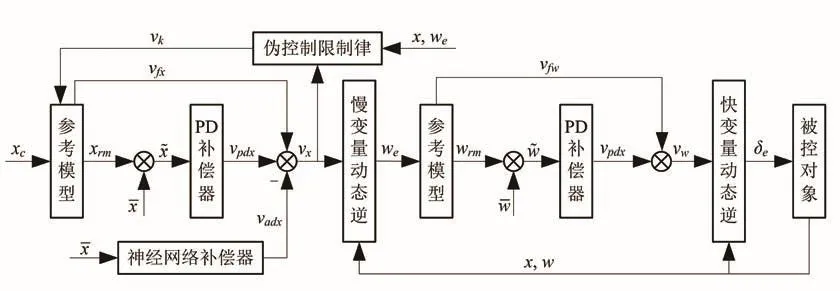
图20 在线神经网络的自适应控制系统结构
另有基于自适应逆的MAV飞行控制系统,如下图所示。控制器主要由动态逆控制器、PD补偿器、神经网络补偿器和伪控制补偿器四部分组成。动态逆控制器把伪控制信号转化为期望控制量;神经网络补偿器补偿由于模型不精确引起的逆误差;伪控制补偿器将作动器特性引起的伪控制误差引入到参考模型中,消除作动器饱和对自适应单元的影响。
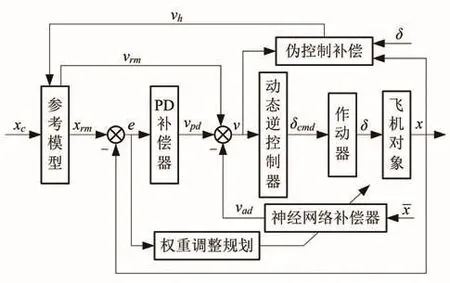
图21 基于自适应逆的MAV控制系统结构图
图21中:参考模型取为一阶系统xrm=vrm-vn,其中vm=frm(xrm,xc);xc为外部命令信号;xrm为参考模型输出的期望系统响应;x为系统状态量;e为指令跟踪误差;vrm为参考模型输出的伪控制信号;vpd为PD补偿器输出信号;vad为自适应神经网络补偿器输出信号,vh为伪控制补偿信号;v为总的伪控制量;δcmd为期望控制量;δ为实际控制量;,为在线神经网络的输入,其中Z为神经网络权矩阵。神经网络补偿器不需要进行离线训练,它通过权值和阈值的实时更新来保证网络的逼近性能和在线实时控制的特性。最终可求得如下期望的控制量。
另外一些比较有价值的研究方向有在飞行器表面分布微气囊或微小型固体火箭发动机阵列进行微喷流干扰控制,或者采用柔性翼智能自适应外形进行气流控制等[15]。
4.4 自主导航与避障技术
微小型飞行器所设定的一些任务模式决定它常常需要在操纵者的视线之外飞行,这就意味着微小型飞行器必须具备自主式的导航系统[16]。该系统的研制难度极高,一方面控制导航系统的复杂程度很高,另一方面又要求它们的体积和质量要尽量小以不影响飞行器正常飞行。
光流避障技术是近几年研究较多的避障方法,本文就其中之一的技术难点——基于光流的深度估计算法浅述其基本原理。
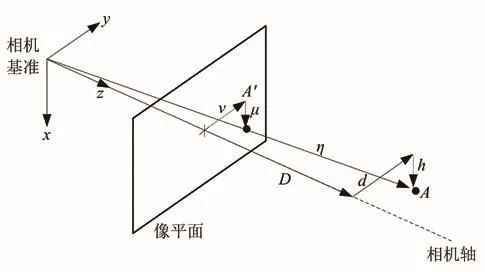
图22 针孔成像示意图
4.4.1 光流大小与深度关系数学建模
4.4.2 图像膨胀中心(FOE)估计
图像膨胀中心(FOE)并不一定在图像的中心,实现FOE估计首先提取Harris角点,估计角点稀疏光流(好处在于角点处的光流提取精度较高),然后检测图像中每行每列光流正负跳变点,加以平均得出FOE。
如图23所示,FOE是图像中光流变化的发生源;箭头标识光流。
图像角点检测目的在于检测图像中纹理性强的区域,这类区域通常存在于边缘交界处、被遮挡的边缘和纹理性很强的图像内部区域等。这些区域由于在图像信息匹配时提供的信息可分辨性较强,匹配比较容易。相比一些无纹理特征的区域,即高频信息很弱的区域,角点区域的图像匹配能力明显更强。
在摄像机沿光轴运动的情况下,FOE点处没有光流,而其周围点光流方向都是向外扩散的,且距离FOE点越远光流值越大。理论上来说,所有光流向量所在的直线都经过FOE,因此,它可通过求两条光流向量所在直线的交点确定。但任何微小的扰动都可能导致测量错误,所以,由所有角点的光流方向共同确定的FOE 更为准确。对于FOE左侧的点,光流矢量的水平分量指向左侧,对于FOE右侧的点,光流的水平分量指向右侧,在FOE所在的垂直直线上,光流的水平分量会有正负值之间的跳变,称为水平跳变。同理,FOE所在水平直线上存在垂直跳变,可以利用两条直线的交点求取FOE。实际场景中存在噪声,所有的跳变点不一定均分布同一直线上,可分别记录水平和垂直方向的跳变点坐标,对于同时产生水平、垂直跳变的坐标求平均值作为实际FOE。实际场景中求得的FOE如下图所示,其中,FOE以圆圈标识,为了更清晰地显示光流矢量的特征,将光流大小放大了3倍显示。

图23 FOE与光流的关系
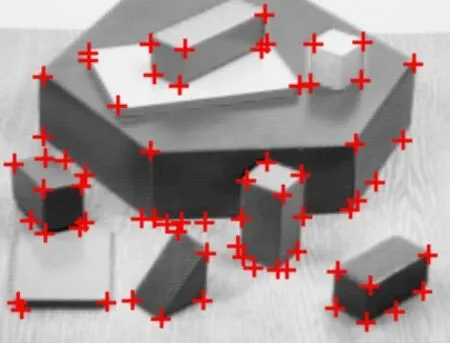
图24 图像Harris角点检测结果(只显示邻域中的最强响应)

图25 Harris特征点检测结果(角点检测响应值r)
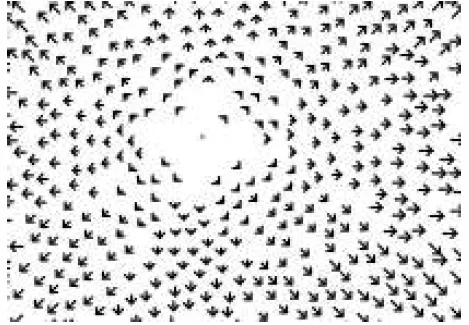
图26 实际场景中的FOE
4.5 光电传感与图像传输技术
微小型飞行器最常用的功能是作为侦察监测工具,其情报信息是探测系统通过光电信号提供的,光电传感器可提供完整的实时图像情报信息。能够在复杂的飞行环境中实现高质量的图像探测与识别将是微小型飞行器满足未来信息战的一项关键技术。
由于微型飞行器体积小,严重限制了任务载荷容量,因而对于小体积的微型飞行器,光电类任务载荷一般采用与飞行器捷联固定方式,这就要求成像器具有宽成像视场(数十度)、较高的图像分辨率(1024×1024或更高),以实现对较大范围内的成像覆盖和高分辨成像能力。而且,在低速飞行状态时,气流扰动、振动和MAV机体机动,对摄像质量会有影响,需适当采取减振和稳像处理,并采用动态性能好的图像传感器以提高成像质量。
目前微型光电类任务载荷主要采用CCD和CMOS两种传感器作为光电转换器件。与CCD相比,CMOS图像传感器实现了光敏组件阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器的高度集成,并具有体积小、低功耗、宽动态范围、外围电路简单等特点,是适用于微型飞行器的一种微型摄像机的理想途径。目前采用1/3英寸芯片的超微型摄像机可以做到13mm×13mm尺寸,质量几克,后续随着1/5、1/6英寸以及更小尺寸图像传感器芯片的应用,将会进一步缩小摄像机的体积,预计可做到现有体积的2/3以下。如图27所示,微型CMOS摄像载荷主要由以下几部分构成:光学系统、CMOS图像传感器、电源滤波电路、SCCB接口和输出接口。
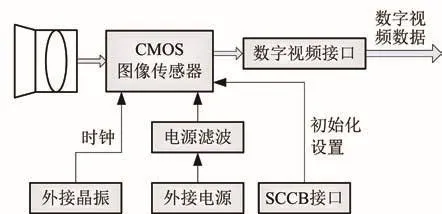
图27 基于CMOS的微型摄像载荷原理组成框图
由于体积功耗限制,MAV上较难采用自动识别和匹配的处理方式。因此,为实现侦察监视任务,一般需要将数据记录回收或直接通过数据链路将压缩视频回传地面进行人在回路确认,后者是更利于实时侦察的方式。为了能够将探测到的图像信息实时回传至地面端的监控系统,微小型飞行器需要搭载视频图像传输设备,其所消耗的电力一般占整个微小型飞行器所需总电力的1/5。采用人在回路方式的系统组成原理框图如下,主要通过装备在MAV上的微型摄像载荷装置拍摄地面情况,再由视频发射机将视频信号实时发送回地面,实现对微型飞行器飞过地区的侦察和实况监视。目前微小型飞行器的尺寸越来越小,但是传输规定带宽的视频图像的电力却不能减小。通过调节图像帧速率和采用可转向的天线,或者发展完善的数据压缩技术等方法,可以在一定程度上减少用于数据传输的电力。另外,飞行器微小型化后带来发射功率的减小和器件处理能力的损失,使传输距离和传输速度都受到限制。实现图像信息的实时处理与远距离传输,并在复杂的干扰环境中有效避免图像数据丢包或者具有强大的数据纠错等功能,也将是微小型飞行器执行侦察监测任务的难点。
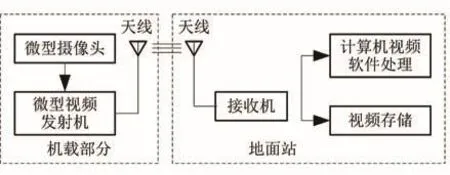
图28 MAV光电摄像与无线传输系统原理组成框图
4.6 部件微小型化及系统集成技术
微小型飞行器在尺寸上远远小于常规的飞行器,其机体容积和承载质量均十分有限,因此它可以携带的机载设备装置和有效载荷受到极大的限制。要实现微小型飞行器的进一步小型化和轻量化,必须实现微小型飞行器各部件及机载元件的微小型化[17]。
近年来,借助微纳米科技与MEMS技术的发展,微小型飞行器部件和机载元件的微小型化已取得不少进展,其主要分为两类,一类是飞行控制导航所用传感器,如陀螺和加速度计、磁强计、气压计、温度传感器以及微处理计算机芯片等;另一类是对外探测传感器,如微小型可见光摄像机、热成像仪、红外探测仪、超声波测距仪、毫米波测距仪、激光测距仪等。除了传感器感知元件本身采用MEMS技术进行微小型化之外,通过结构设计或加工工艺将传感器件的外围电路同样研制为芯片,甚至两者集成在单个芯片上,能够进一步提升微小型飞行器机载部件的微小型化。

图29 微型信息处理模块、微型数据存储模块、微型惯导模块
由于微小型飞行器的体积限制,其不能像常规飞行器那样将各种部件和功能模块简单地安装在机体内。从微小型飞行器的设计要求和所需具备的功能来看,微小型飞行器应是一个各种多功能系统高度集成的复杂系统,其中包括各微小型器件的高度集成、有效载荷的高度集成和各种功能模块之间的最小限度集成等,图30所示的Kestrel TM Autopilot微型飞行控制器,集成有8位中央处理器、MEMS-IMU、静压和差压传感器、3个温度传感器、4个串行接口、4路舵机输出等,质量为17g,尺寸为 51mm×35mm×12mm。
微纳米科技与MEMS技术的发展有利地推动了微小型飞行器的系统集成化与多功能化。然而,采用微纳米科技与MEMS技术本身也具有复杂性,如MEMS器件本身的微小化、跨学科、高度集成特性等所带来的设计的复杂性,以及MEMS微细加工方法会对设计本身增加新的制约等,也使微小型飞行器的设计与集成变得更加复杂。
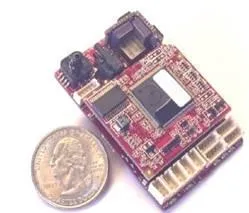
图30 Kestrel TM Autopilot v2.22
系统的高度集成必然会存在各微小型器件或多功能模块之间的耦合以及其它相互干扰因素,例如数据链通信系统中的高频射频信号可能对数字计算单元造成高频信号耦合干扰,大功率模拟电路中的瞬间大电流过载可能对数字电路的信号处理造成脉冲干扰。除了干扰因素之外,系统的高度集成造成的散热问题也应值得深入考虑。因此,如何克服这些难题以保证系统正常工作将是MEMS技术用于微小型飞行器所要解决的关键问题。
此外,由于系统的高度集成带来结构设计和加工工艺方面的限制,微小型器件和功能模块的精度通常较低,测量信息中有时误差比较大。通过理论研究和试验设计的方法对误差进行分析和建模,然后进一步对误差进行补偿以提高使用精度是改善微小型器件和功能模块特性的有效手段。
4.7 群组协同技术
微小型飞行器的特点决定了其自身载荷能力受限,相应的单独使用其执行任务的能力也将受到限制,因此微小型飞行器采用集群协同的方式执行任务将是未来微小型飞行器的主要使用方式,这就需要通过通讯网络将大量飞行器进行组网并协同执行任务。微小型飞行器进行组网协同主要涉及协同制导控制、载荷及数据链等关键技术。
4.7.1 协同制导控制技术
协同制导控制技术是实现微小型飞行器的协同飞行的基础技术,需要保证多个飞行器在自然和人为干扰等不确定条件下能够协同飞行,完成既定任务,如风干扰、地形障碍、通信中断等条件下机群不发生碰撞,该项技术影响任务执行能否达成。目前相关的研究主要集中在分布式协同制导控制技术方面,其在多弹分布式协同攻击作战时的系统结构如图31所示[18]。该技术的优势在于飞行器仅需一定范围内的邻居信息作为控制的输入,并不需要全局信息从而降低了对于通讯手段连通度的需求,此外其控制策略运行是分布在所有集群内飞行器上的,没有集中的处理单元,在部分单元受损的情况下并不影响其他单元继续执行任务,抗损伤能力强。
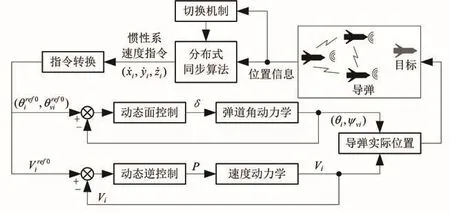
图31 多弹协同制导与控制系统结构
4.7.2 基于协同的多任务载荷应用技术
微小型飞行器协同集群的多任务属性决定平台必需配备多种任务载荷,以实现广域广谱信息探测、干扰压制、诱饵欺骗等多种不同功能,而且通过组成多节点、分布式群组,增大测量基线、扩大作用范围、提升压制强度,达到执行效能倍增的目的,因此需要研究基于协同的载荷应用技术,实现分布式载荷网络化、有序化。基于协同的分布式载荷应用的难点在于:(1)分布式载荷之间存在时间与空间的一致性问题,特别是探测和欺骗类任务,对时间与空间的一致精度要求很高,否则探测精度或模拟特征会受到较大影响;(2)分布式载荷之间以无线链路为纽带,数据传输存在不同的时延,直接影响多节点异地信息还原精度;(3)不同体制载荷相互配合制定任务时,需要进行快速实时的目标关联、信息统一和数据融合,对载荷信息处理和计算能力提出较高要求。为了到达高度智能化而无限度提升微小型飞行器的计算能力,将会带来成本大幅增加、效费比降低的代价,因此,需通过对多体制的探测类载荷、干扰欺骗类载荷以及其他新体制载荷和数据链在分布式状态下的协同应用技术进行攻关,形成分布式智能传感器,降低系统复杂度和使用成本,提升微小型飞行器集群协同执行任务的技术成熟度。
5 总结与展望
微小型飞行器的研究范畴涉及空气动力学、能源、电子、机械、制造、材料、控制、信息等诸多学科,其发展过程中与集群协同技术、模块化技术、数据链技术有着密不可分、相互促进的关系;综观微小型飞行器的研究现状和相关技术的发展趋势,可以预见微小型飞行器未来的研究将朝着多样化、仿生化、集群化、智能化等方向发展;未来十几年,待各相关技术发展成熟,微小型飞行器将在军事和民用领域获得广泛应用,或将改变未来战争及人类生活方式。
5.1 与各相关技术相互促进
由微小型飞行器最大的特点——“小”可知将来其在应用中必须靠“众”来执行任务与达到预期效能,因此,集群协同技术是微小型飞行器“生有所用”必须依赖的关键技术。蜂群式的协同攻击作战成员数量庞大,蜂拥而至导致敌人手足无措,巧妙突破敌方防御网,对敌重点设备的核心部位进行定点失能毁伤,为我方后续进行大型武器装备攻击提供窗口。然而,蜂群作战对我方将带来成本问题,成百上千的个体参与战斗,若单枚的价格不能控制,那么“蜂群”就真的成为了纸上谈兵,不切实际。而降低成本的最有效手段就是批量生产,因此微小型飞行器的发展将极大促进模块化技术的发展。微小型飞行器以模块化设计生产,实现不同功能只需换装不同的功能模块并能实现百分百兼容。另外,集群协同作战的前提就是信息共享,百量级的通信节点对未来数据链的发展提出了极高的要求,除了节点众多之外,数据传输速率更是拔高了数据链能力要求,以便蜂眼能够实时将所见共享至整个蜂群。微小型飞行器也亟需低功耗元器件、高能量密度电池等技术的支持,飞行器的发展牵引着该类基础产业的发展。
另一方面,现有技术的发展也对微小型飞行器的发展路线有着巨大的影响。当下虚拟现实技术(VR技术)正如火如荼的发展,可以想象未来微小型飞行器运用该技术可以更好的诱骗敌方防控系统,蜂群虚拟出来的场景可让敌防空导弹彻底迷失。
5.2 微小型飞行器可期的发展方向
(1)实用化是微小型飞行器发展的最终目标。目前,由于微小型飞行器的续航时间、抗风能力、协同通信等问题尚未得到很好解决,其离真正的实用化还有相当距离。从目前的研究基础看,固定翼微小型飞行器的技术在未来几年可望率先发展成熟;
(2)飞行器的大小和飞行性能与鸟类、昆虫相当,随着技术的不断发展成熟,仿照自然界生物的飞行方式,微型扑翼飞行器的研究可望成为最大的热点。另外,随着低雷诺数气动机理研究的进展,会有更有效的升力产生机制和气动布局,解决微小型飞行器气动效率过低的问题;
(3)智能微型飞行器是微小型飞行器发展的最高形式,代表了未来的发展趋势。目前,微小型飞行器的发展还提不到智能自主飞行的高度,绝大部分都还局限于地面遥控飞行+自主导航方式。抗干扰稳定飞行控制技术还有待发展应用,飞行控制和导航系统还要进一步提高精度和处理能力,实现集成和微型化。但可以预见,随着这些基础技术问题的解决,智能控制、智能导航、任务规划、视觉和仿生智能等技术的充分发展和应用,各种微小型飞行器最终可望实现智能自主的飞行。
5.3 微小型飞行器的应用
未来微小型飞行器发展成熟将具有体积小、隐蔽性好、质量轻、成本低、功能强、携带方便、操作简单等突出特点。这些特点使其能够完成大型无人飞机无法执行的任务。如果在这类飞行器上配有摄像机和无线电收发装置,则完全有可能代替人完成在远距离和危险的区域中监视和跟踪任务。因此无论是在军事领域还是在民用领域,微小型飞行器都有十分诱人的应用前景。
可预见的军事应用包括:弹着点定位、战争中低空侦察(城市战中对目标持续监视)、战场评估、通信中继、信号干扰、雷达诱骗等;民用领域的应用则有:搜寻灾难幸存者、通信中继、渔业保护、农作物监测、环境保护、电力线机燃气管路巡检等。
微小型飞行器的发展还有很长的路要走,但其也拥有广阔的前景。不管是从使用价值方面考虑,还是从推动技术发展方面考虑,对于我们来说都是迫切需要开展的一项重要研究工作。
参 考 文 献
[1]文苏丽,宋怡然,何煦虹,等.世界飞航导弹发展综述[J].飞航导弹,2015(1).
[2]丛敏,张婵.国外微小型导弹发展现状[J].飞航导弹,2011(10)∶1-8.
[3]王立文.空中小精灵:微型飞行器挑战传统设计思维和战争模式[J].国际航空.2000.
[4]McMichael JM,Francis MS.Micro air vehieles-toward a new dimension in flight.USAF,DARPA TTO document.august 7,1997.
[5]Grasmeyer JM,Keennom MT.Development of the black widow micro air vehicle.2001.AIAA Paper No.2001-0127.
[6]晓清.美国微型飞行器计划进入飞行试验阶段[J].国际航空,1999 (9).
[7]张有.单兵“掌中宝”:美国“矛头”Pike微型导弹[J].兵器知识,2016(1)∶48-50.
[8]吴怀字,周兆英,熊沈蜀,等.微型飞行器的研究现状及其关键技术[J].武汉科技大学学报,2000(23).
[9]苑伟政,马炳和,毛竹群.基于MEMS的微型飞机关键技术[J].航空精密制造技术,2000(6).
[10]李锋,白鹏,石文,等.微型飞行器低雷诺数空气动力学[J].力学进展,2017,37(2),257-268.
[11]昂海松.微型飞行器设计导论[M].西安:西北工业大学出版社,2012.
[12]罗均,蒋秦,程维明,等.国际上微型飞行器研究的进展及其关键技术[J].上海大学学报,2001(7).
[13]周新春,昂海松.微型飞行器研究进展与关键技术[J].传感器与微系统,2008(6).
[14]蔡红明,昂海松.基于自适应逆的微型飞行器飞行控制系统[J].南京航空航天大学学报,2011,43(2)∶137-142.
[15]胡宇群.微型飞行器中的若干动力学问题研究[D].南京:南京航空航天大学.2002.
[16]Bellingham J,Tillerson M,Richards A,How J.P.Multi.task allocation and path planning for cooperative UAVs.Cooperative Control∶ Models,Applications and Algorithms.Denver,CO,2003,23-41.
[17]Ho CM,Tai YC.Micro-electro-mechanical systems(MEMS) and fluid flows.Annual Review of Fluid Mechanics.1998,30,pp.579-612.
[18]后德龙,陈彬,王青,等.碰撞自规避多弹分布式协同制导与控制[J].控制理论与应用,2014,31(9),1133-1142.