基于BQZSI与MRAS的电动汽车驱动控制与改善
2018-07-23张明磊
李 忠,张明磊,宁 媛
(贵州大学 电气工程学院,贵州 贵阳 550025)
感应电机在工业传动系统中拥有广泛的使用,可用于泵类、电梯、电动车辆等牵引系统中。近年来,随着半导体技术的突破,实现了感应电机拥有与直流电机相媲美的调速性能,加诸当今环境问题和石油能源消耗日益严重引起了世界各国的广泛关注。电动汽车因其具有绿色环保与能源利用效率高等优点,被认为是实现零排放的唯一可用汽车技术。而电力驱动技术是制约电动汽车发展的三大关键技术之一,因而研究满足高性能、高精度的电动汽车电机驱动控制系统具有重要意义。作为功率变换模块的变流器而言,虽通过DC-DC变换器级联获得的逆变器被广泛运用,但要获得较高的负载输出电压则要提高直流侧(电池)的电压,通过控制直流侧电压可以增加整个牵引系统的效率,但同时也提高了成本。考虑到双向准Z源逆变器拓扑结构具有DC-DC变换器和电压型逆变器的功能,同时也具有升压与DC-AC变换的功能。与DC-DC变换器级联的电压型逆变器相比,其能减少设备的开关次数,进一步降低了成本且提高牵引系统的效率[1]。另一方面,其还能提高直流电压利用率和实现功率双向流动[2]。对驱动电机而言,为了不影响牵引系统的动态性能同时避免使用速度传感器进而减少维护需求和增加系统的稳定性,电机转速的估测不可避免。虽有多种策略可用于电机的无速度矢量控制,但模型参考自适应(MRAS)控制方法由于其简洁性而流行起来[3]。此方法充分利用两个相互独立的电机模型来估计相同的静态量,最终实现转速的估计。因此,本文基于MRAS和BQZSI原理,通过建立Simulink电动汽车驱动系统,并使用模糊逻辑控制改善系统低速控制性能。
1 双向准Z源逆变器模型及控制策略
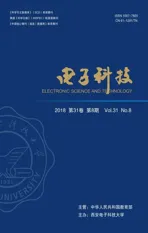
传统电压型逆变器局限性较大[4],采用双向准Z源逆变器,其具有提高直流电压利用率的同时还能实现能量双向流动。另外,也不必考虑死区问题提高系统的可靠性。双向准Z源逆变器的拓扑结构,如图1所示。
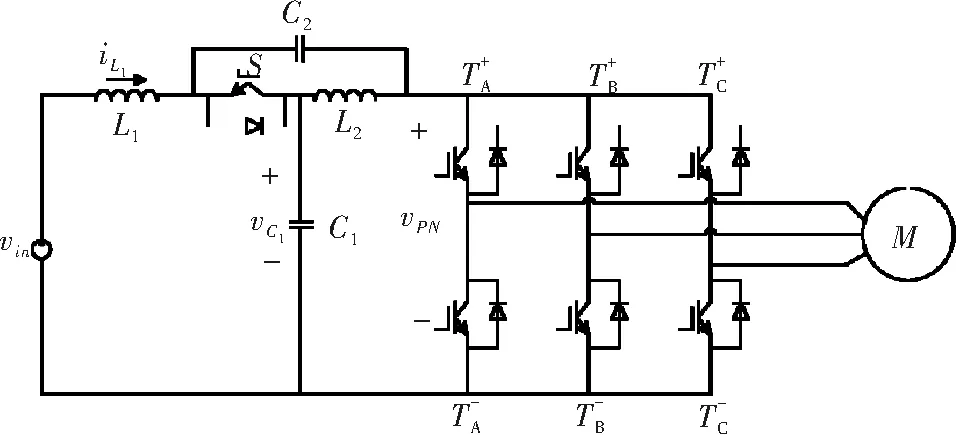
图1 双向Z源逆变器(BQZSI)拓扑结构图
由图1所示,拓扑结构图由两部分组成。其中,一部分由C1,C2,L1,L2和开关S与一个二极管反并联组成;另一部分是三相逆变桥,通过控制开关可实现功率的双向流动。BQZSI有3种运行状态,有源状态、0状态和直通状态。在直通状态下,桥臂的上下开关管同时导通,利用直通状态实现直流侧电压的提升。即
(1)
式中D为直通占空比,当D在某个值时输出最大交流电压值可用式(2)进行计算[5]
(2)
1.1 带偏置的简单升压spwm控制
双向准Z源逆变器的控制策略与传统逆变器的控制类似,唯一的区别是当需要升压时在开关状态中插入直通状态[6],即简单的升压控制。同时为了提高调制指数,进而提高输出的平均交流电压值,此处采用附加偏置的方法。即

(3)
式中,offset是所加偏置量,Vmax和Vmin分别是调制信号的最大值与最小值。
1.2 门极信号与开关S信号产生
门极信号的发生原理可用图2说明。当载波信号同时大于直通参考信号Vp和三相调制信号的上包络线(va,vb,vc)或低于直通参考信号VN及下包络线时,三相桥同时导通处直通状态、有源状态和零状态与传统的SPWM相同。不同之处在于,零状态过程中插入了直通状态。简单升压控制的直通参考信号可以是一条高于或低于调制波包络线的直线,对于开关S其控制信号为直通信号的互补信号。当三相桥处于直通时,开关S开路,反之则导通。

图2 门极信号与开关S信号发生
据上述原理做出的带偏置的简单升压SPWM控制模型,如图3所示。
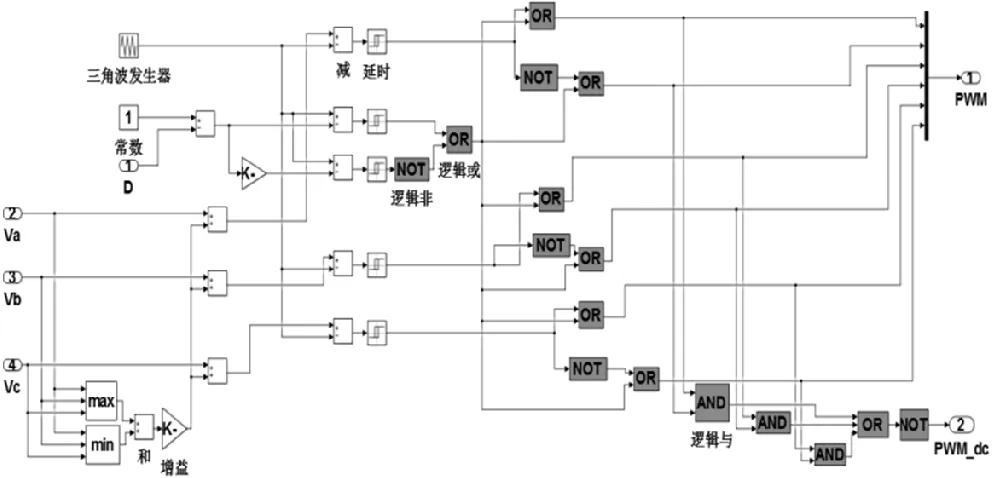
图3 带偏置的简单升压SPWM产生
1.3 双向准Z逆变器的控制策略
将BQZSI中两电容C1和C2的电压值Vc1和Vc2相加,再与直流侧的参考指令电压相减后,经PI控制器后获得指令信号。随后再与电感L1的电流IL1相减后,经PI控制器后产生直通占空比信号D,即使用电感电流外环与电容电压外环的控制方式。直通占空比的产生,如图4所示。
图4 直通占空比的产生
2 感应电机无速度传感器控制
基于模型参考自适应(MRAS)的控制方式,能实现感应电机的无速度传感器控制。该控制方式是假定气隙磁场是正弦的,通过定子模型或闭环模型如自适应观测器来实现。其中,自适应磁通观测器有较高的精度和鲁棒性,对电机的参数变化敏感性较低,因而适用于电动汽车驱动系统中。
2.1 自适应控制原理
模型参考自适应系统由两个模型构成,参考模型和自适应模型。两者相互比较,并不断调整自适应模型直到两者的输出相等[7-10]。其功能块图如图5所示。
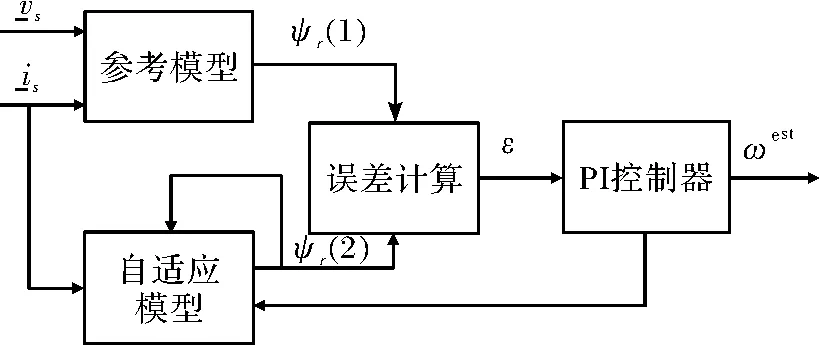
图5 MRAS原理方块图
假定参考坐标系的旋转速度为0,电机基本方程可写成如下
(4)
(5)
式中,Lr,Lm,σ,Ls,Tr分别表示转子电感、磁化电感、漏感系数、定子电感和转子时间常数。因式(4)中第一个公式与转速无关,故可作为参考模型;第二个公式由转速和定子电流相关,故可作为自适应模型。式(5)在α-β坐标系下的矩阵形式如下
(6)

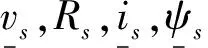
2.2 闭环磁通观测器
实际上可以用不动的模型作为参考模型或自适应模型,但由于参考自适应模型对电机参数的变化敏感,当电机在较低速度下运行时影响更为明显。同时,也会降低控制的鲁棒性。故为改善性能,即使在较低的转速时依然获得较好的效果,可加入磁通观测器[11-15]。定转子磁通基于α-β坐标的估算方程,如式(7)所示。
标准节相关知识分为三类,第一类是几何参数,包括标准节规格、主弦管规格、角钢规格、斜腹杆规格、齿条规格、联结螺栓、联结螺母以及垫圈规格等,选择所需这些零件的规格建立标准节模型。第二类是物理性能,选取设计所需材料,读取知识库中相对应材料的密度、质量、热处理方式,为力学计算打下基础。第三类力学性能,针对上述两类知识的选取,计算得到相关的力学知识,节约计算时间。

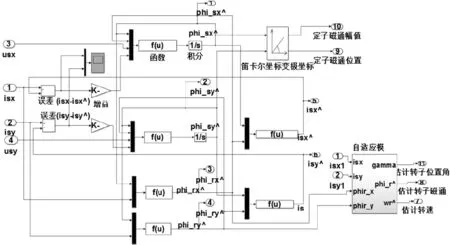
图6 带转子磁通观测器的MARS
2.3 电动汽车驱动系统整体框图
提出的驱动系统整体框图和仿真模型,如图7和图8所示。其实现了电机的无速度传感器的转矩及磁通的解耦控制。
图7 整体控制框图
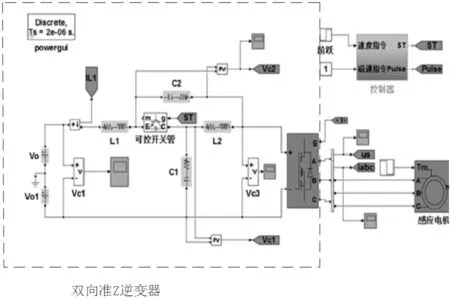
图8 整体Simulink仿真模型
3 仿真结果
当给定速度指令阶跃变化,初值为800 r/min,终值1 500 r/min,跳变时刻为0.3 s;直流电源为400 V,电机外加负载转矩也为阶跃变化,初值为30 N·m,终值为-30 N·m,跳变时刻0.6 s,总仿真时间为1 s。直流侧电压响应,如图9所示。
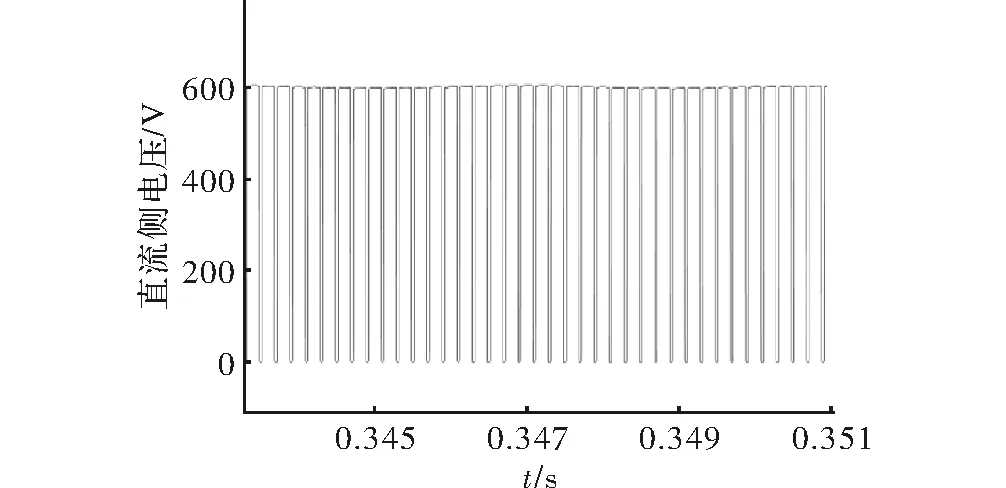
图9 直流侧电压响应
从图9可以看出,直流侧(DC-Link)电压矩形波幅值约在600 V,而输入的直流电源电压仅为400 V。可见双向准Z逆变器实现了直流侧电压的提升,且提高了直流电压利用率。三相定子电流响应,如图10所示。
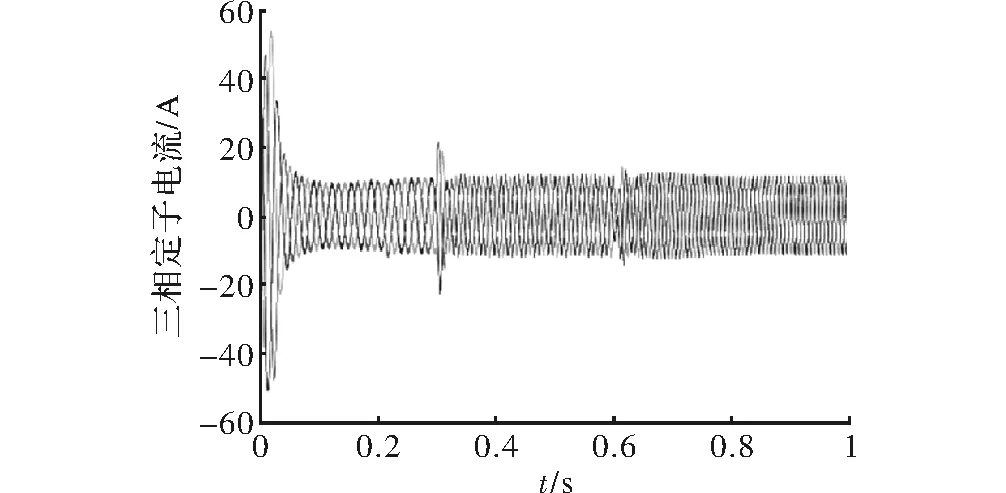
图10 三相定子电流响应
从图10可看出,在时间为0.3 s和0.6 s时定子电流因速度指令变化会产生轻微超调震荡,随后趋于稳定正弦量。电感L1的电流响应与电机电磁转矩,分别如图11和图12所示。
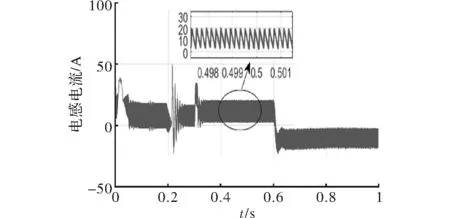
图11 电感L1的电流响应
由图11可知,通过电感L1的电流有较大的脉动。但在0.6 s前,电流方向未改变。在之后由于给了-30 N·m的转矩指令,发生再生制动,能量从负载侧回馈到电源侧。因而流过电感的电流方向与之前相反,这也证明了双向准Z源逆变器能实现功率的双向流动。
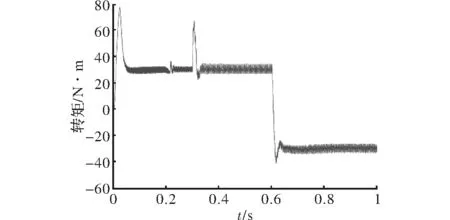
图12 电磁转矩响应
从图12可看出,电机的转矩输出与指令一致。即初值为30 N·m,终值-30 N·m。在0.6 s时发生跳变,在0.3 s时因速度指令发生改变。因此,在此时刻转矩也会发生突变。
电机实际转速与估计转速响应,如图13所示。
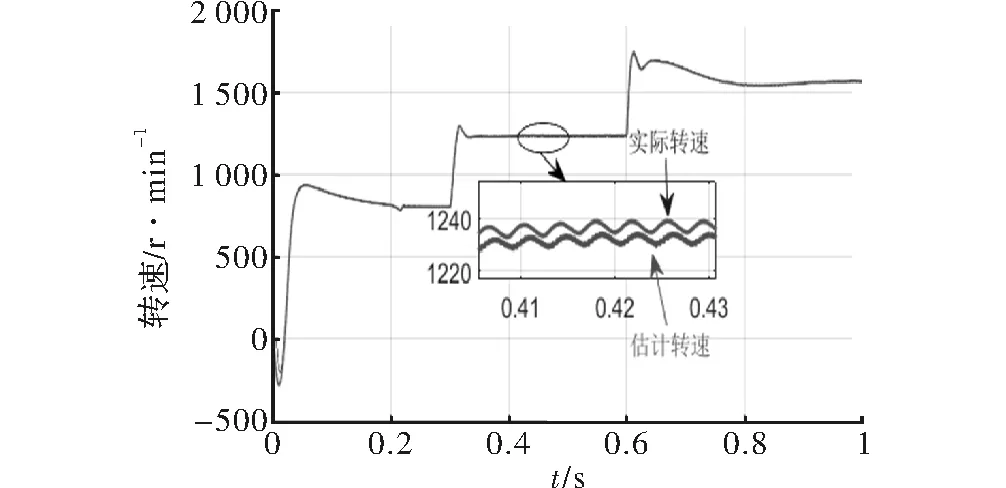
图13 实际转速与估计转速响应
从图13中可看出,在刚开始电机转速较低时,估计转速未能准确跟踪实现转速。即使在稳定时,估计转速与实际转速仍有稳态误差。
4 加入模糊逻辑控制改善低速跟踪控制
在我国大部分城市中,行车速度限制在70 km/h以下。在城乡地区行车速度还会更低,加上交通拥堵等问题还会使电动汽车频繁启动,故对于电动汽车在低速下运行的精确控制提出了更高要求。虽采用精确的MRAS系统能获得较准确的速度估计,但电机在运行过程中会因参数变化外界干扰使计量的精确度下降[16]。为解决这一问题,加入模糊控制器(FLC)进行改善,使得即使是在低速时也能进行较精确的转速估计,进而改善了低速控制性能。
4.1 FLC控制器结构
当使用模糊逻辑控制器时,不止一个输入信号,通常的输入信号分别是误差和误差变化率。当输入信号增加时,其规则成指数增加[17],仅考虑两个输入时的情况。两输入一输出的模糊逻辑控制器框图,如14所示。
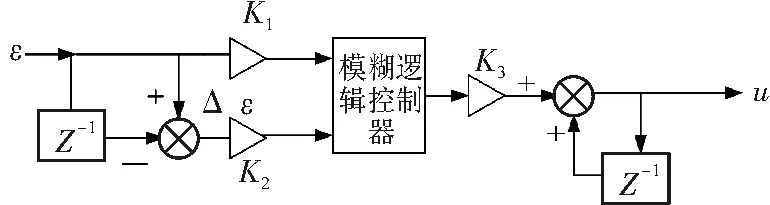
图14 模糊控制器框图
4.2 带FLC的MRAS设计
本文采用Mamdani型FLC,两个输入信号分别是速度误差信号和误差变化率 和 。其的定义如下:每个变量有7个三角隶属函数,使用的模糊集是NB、NM、ZE、PS、PM、PB,输入输出的论域为[-0.1,0.1]。规则库如表1示,使用Matlab的fuzzy-logic toolbox GUI进行开发FLC。
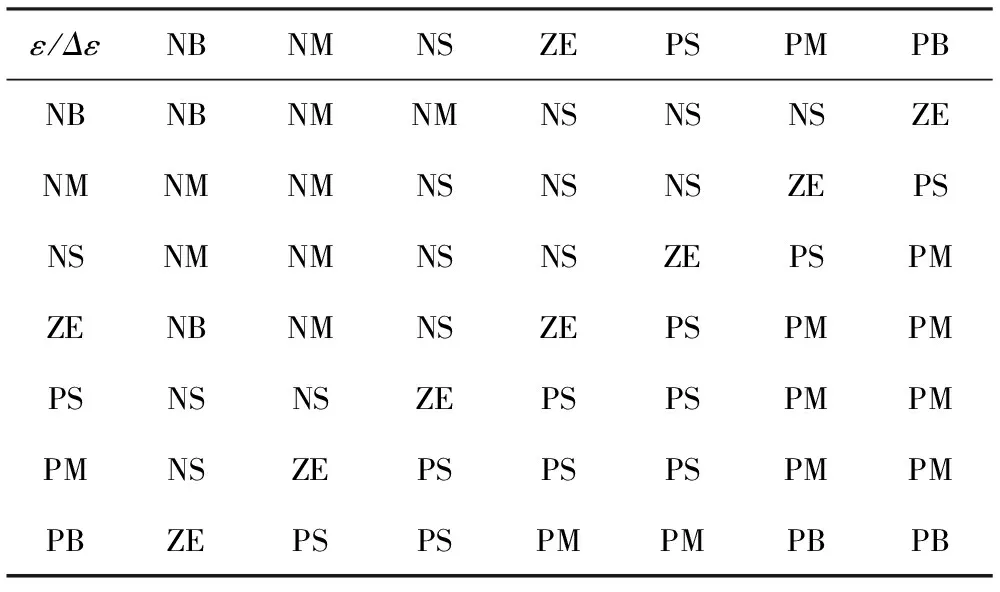
表1 FLC规则库
带FLC的MRAS仿真模型,如图15所示。
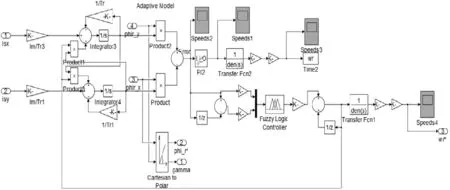
图15 带FLC的MRAS
4.3 改善前后对比
由图16与图17对比可以看出,当加入FLC后在驱动电机初始工作时,即使在较低的转速时估测转速依旧能较好的跟踪实际转速。而实际转速与估测转速几乎能完美的跟踪,两者间的误差也大幅减小。同时两者有相互交叠部分,相对误差仅在5‰以内,明显改善了低速控制精度,从而也提升了系统的整体控制性能。
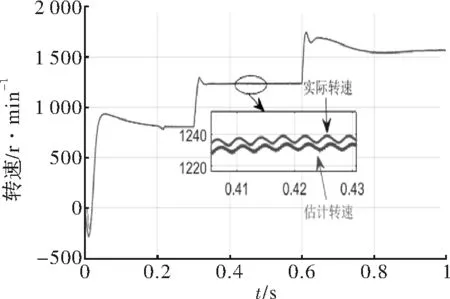
图16 未加模糊控制的转速响应
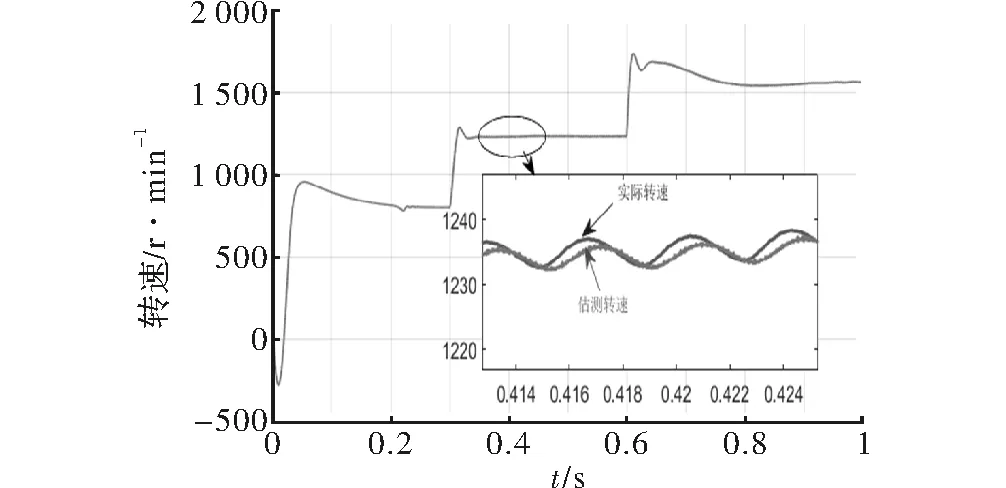
图17 加入模糊控制后的转速响应
5 结束语
本文采用了基于准双向Z源逆变器(BQZSI)与模型参考自适应(MRAS),对电动汽车驱动系统进行设计与控制实现。从仿真结果可以看出,实现了驱动系统的正常运行。同时,还实现了系统的能量双向流动。但考虑到该系统在低速或频繁启动时,因估计速度不能完美跟踪实际速度带来控制性能不佳的问题,而采用模糊逻辑控制器对该系统进行了改善。使之在较低的速度下,依然有较高的控制精度与性能。