用于城市地下管井测量的摄影测量仪研制与试验
2018-07-21范光鹏冯仲科闫飞凡
范光鹏,冯仲科,闫飞凡
(1.北京林业大学 精准林业北京市重点实验室,北京 100083;2.哈尔滨师范大学 地理科学学院,黑龙江 哈尔滨 150000)
城市管井是城市地下管线的重要组成部分,基于PDA的地下管线采集处理系统已开始投入应用,实现地下管线属性信息现场记录[1-2],由于城市地下空间的不确定性,尤其地下管井测量的危险性和高强度作业,使得测量人员无法到达或者无法人工测量[3-5],为了克服外界因素的影响,非接触式的测量方式受到重视[6-7]。
随着信息智能化时代来临,利用更加集成化、智能化、精准化的观测装备成为了测量调查的主流[8-11]。冯仲科等研发了远程摄影超站仪,CCD超站仪,多功能便携式微型超站仪,多功能电子枪等,可以对立木进行测量[8-11];刘国安等研制了平板电脑的地下管线数据采集系统应用;侯鑫新等提出了一种基于单电荷藕合器件图像传感器CCD相机与经纬仪相结合的测量方法,在外业中使用平板电脑记录管线属性数据,是外业数据采集的非智能化;杜良法等嵌入式系统 PDA 技术的应用,实现了管线数据采集内业外业一体化;陈红旗等提出城市地下管线高精度电磁法探测技术[12-17],但外业采集中管径以及井室长宽数据还是采用测量人员下井测量传统工作方式。北京林业大学精准林业重点实验室运用摄影测量学原理[18-22]、图像处理技术、安卓开发技术自主研发了用于城市地下管线测量工作摄影测量仪,针对管井进行非接触式智能化测量。
1 摄影测量仪构成
1.1 硬件构成
摄影测量仪的硬件组成包括精准林业北京市重点实验室自主研发制造的掌上PDA和云台、CCD镜头、激光扫平器、光源笔、绝缘伸缩探测杆,如图1所示。CCD 镜头选用伸缩式定焦光学镜头,背照式CMOS传感器, 6组7片(4片非球面镜片/其中含AA镜片)的镜头结构,F1.8—F4.9最大光圈,LED补光灯,MNP记忆卡,NP-BN/NP-BN1锂电池,200张续航能力,用于测量作业时摄影和摄像。激光器采用优质亚力克镜片组成的光学透镜,5 mW(毫瓦)功率管芯,优质亚克力镜片可以投射一束可视激光束,仪器发射的激光线和摄影中心保持平行。掌上PDA(Personal digital assistant)是将RAM(Random access memory)、GPU(Graphics processing unit)、 CPU(Central processing unit)、ROM(Read only memory image)、wifi 芯片、重力传感器、角度传感器、彩色触控显示屏、电源等高度集成并设计铝合金外壳,用于跟CCD镜头进行网络连接,控制镜头成像,进行影像采集,图片数据处理。充分利用人体工程学原理,将CCD镜头、光源笔和激光器高度集成串联于云台,并分别可拆卸、充电、更换,方便操作,耦合性低。
PDA在受控实验室条件下进行的跌落保护、防水防尘的防护性能测试试验。选用高通骁龙617处理器(MSM8952),8核A53,1.5GHz核心频率,用于处理指令、执行操作、控制时间、处理数据;GPU 选用 Adreno 530,64位处理位数,用于处理获取图像信息;RAM选用双通道LPDDR4X,容量2 GB,最高频率1 866 MHz;HSPA+、CDMA、LTE基带;ROM 选用 C8051F410片内闪存设计,16 GB,速度级别 Class 10,最高持续速度80 m/s;分辨率768*1024,9.7英寸显示屏幕,像素密度132 PPI。陀螺仪采用集成电路芯片 GY-26,用于测量仪器的倾斜角;WiFi功能双频(2.4 GHz+5 GHz),支持802.11a/b/g/n无线协议传感器LIS331DLH ,用于传输图像信息及连接网络以及控制CCD镜头进行影像预览以及拍摄;集成电路 TPS66021集成电源,用于向各器件供电。光源笔采用变焦广角微型电筒,LED泡及附件种类,18650锂电池,用于地下管井测量时黑暗情况下光源供给。手持绝缘伸缩杆3节4 m,伸缩后1.2 m,绝缘纤维材质,外径32 mm,与仪器头部弹簧夹链接,按压式拆卸,如图1所示,仪器硬件总体框架如图2所示。
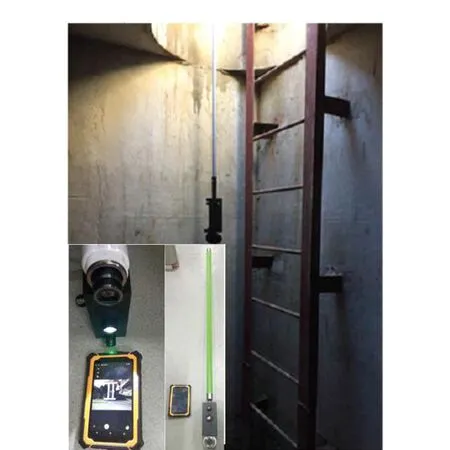
图1 摄影测量仪示意图
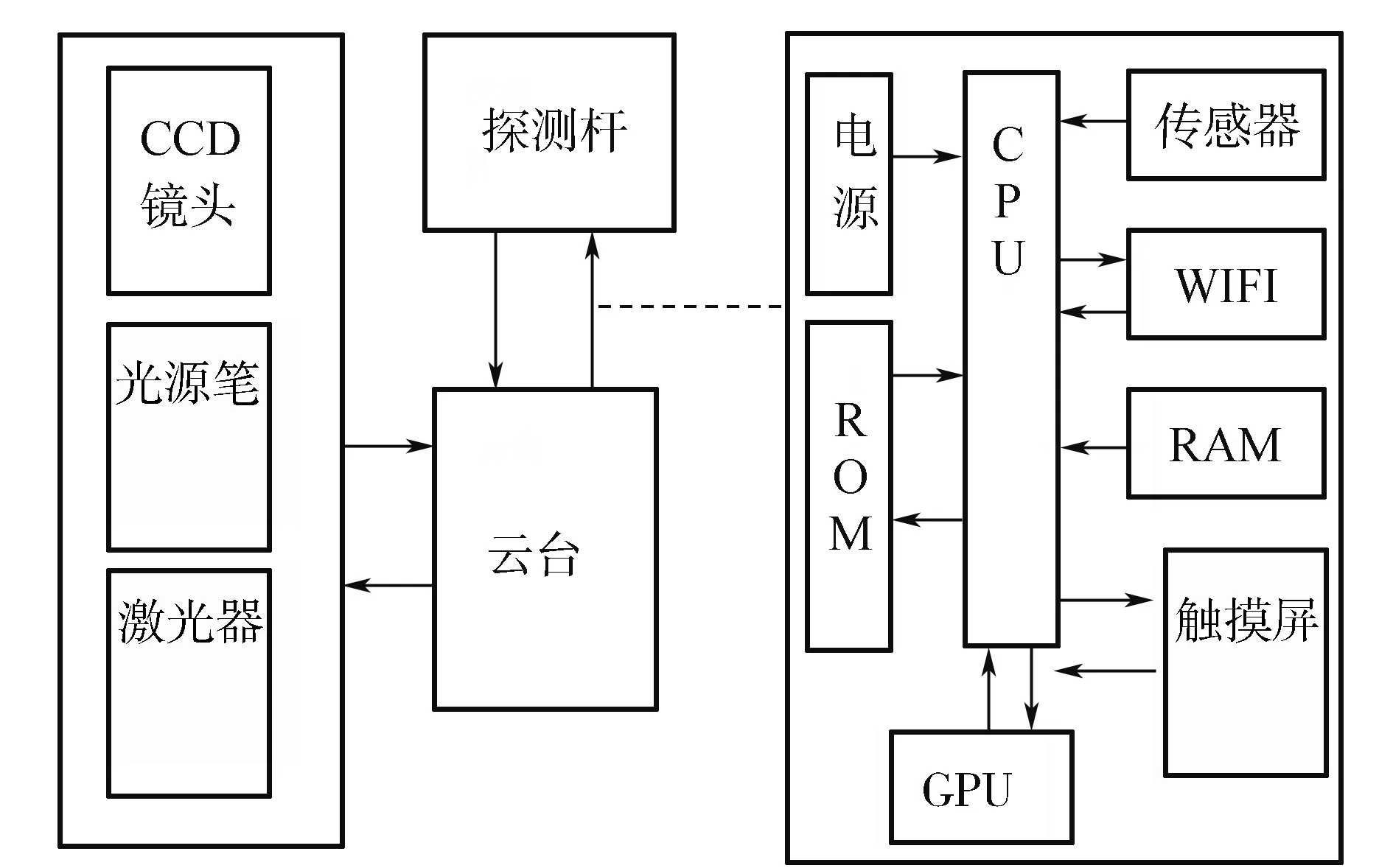
图2 硬件总体框架
1.2 软件设计
使用Java语言编写,在Android Studio 2.2开发环境下实现,将影像数据存储到SQLite数据库中,PDA是基于Linux核心的Android 5.0.2系统平台。软件部分为两大模块设计,分别为管井测量模块和单木测量模块。图3(a)所示,为软件主程序流程图。用户根据实际的测量工作需求,选择不同的模式进行测量。通过在屏幕量测界面实OntouchListener接口方法,达到移动手指便可测量的目的。考虑到实际应用中采集井下图片数据量大的问题,尽量减少OOM的可能性,采用Facebook的Fresco图片加载框架,图片不再占用APP的内存,也能有效避免IllegalState。两者的数据均通过SQLite数据库进行读写操作,对相片进行加载以及对测量结果数据进行保存以及导出。


图3 主程序和功能模块流程图
1.3 功能参数
摄影测量仪的功能包括地下管井直径、纵横断面、井室长宽测量以及井室内部检测。激光器激光类型激光等级为Ⅱ级,激光类型635 nm,小于1 mW,精度±0.5 mm/5 m ,安平范围±3°,室内外兼用,可选择连续激光和脉冲激光之间切换,可360°自由旋转并可微调角度;操作系统为 Android 5.0.2,CPU为1.8 GHz 8核处理器,储存16 G ROM,内存4 G RAM。L2和BDS差分改正,单点定位为3 m,SBAS精度小于2 m,外部源差分小于 0.1 m(CEP)。PDA 尺 寸为222 mm×150 mm×8.5 mm,其电池连续工作时间为9 h。EDM尺寸为1 200 mm×50 mm×30 mm, CCD感光度ISO 160—6 400,WiFi无线传输性能802.11b/g/n,全自动操作,2 020万有效像素,等效35 mm焦距28~100 mm,曝光补偿 ±3EV(1/3EV步长),最高图像分辨率5 472×3 648,全高清(1 080)高清摄像,支持实时取景,用于获取图像信息,其电池连续工作时间为5 h ,云台160 mm×78 mm×70 mm,仪器工作环境温度为20~50 ℃。可变焦光源笔支持散光、强光,2—4档,350流照及以上,持续照时间2 h。伸缩探测杆伸长6 m,收缩后为1.2 m。传统工作方式与采用该仪器后工作方式对比,如图4。

图4 工作方式对比
2 摄影测量仪测量原理
2.1 定焦CCD镜头检校
CCD镜头并非专业的测量相机,所以使用之前需要进行相机标定,在室内均匀布设控制点,并使用全站仪获取得到控制点的三维坐标(X,Y,Z),此时,摄影中心、像点、物点满足共线条件方程式:
(1)
式中加入了以像主点(x0,y0)为原点的坐标改进,引进了由于相机畸变造成的系统误差的改正值(Δx,Δy)。
变换共线方程式,使用DLT直接线性模型进行求解CCD镜头的内方位元素和畸变参数,DLT模型如下
(2)
式中,Li为的系数,表达式分别为
L4=-(L1XS+L2YS+L3ZS);
L8=-(L5XS+L6YS+L7ZS);
在Li的系数表达式中,γ3=-(a3XS+b3YS+c3ZS),ai,bi,ci分别是由外方位角量元素组成的旋转矩阵参数。
将(Δx,Δy)的误差改正数改写成误差畸变方程,即:
r为向径,K1,K2,P1,P2为物镜畸变系数。根据室内检校场内控制点与像点坐标可以进行解算,将其使用矩阵方程表达为
BU-L=V.
(3)
U=[L1L2L3L4L5L6L7L8
L9L10L11K1K2P1P2]T
N1=A(x-x0)r2
N2=A(x-x0)r4
N3=A(r2+2(x-x0)2)
N4=2A(x-x0)(y-y0)
M1=A(y-y0)r2
M2=A(y-y0)r4
M3=2A(x-x0)(y-y0)
M4=A(r2+2(y-x0)2)
A=L9X+L10Y+L11Z+1
求解Li系数与畸变系数总共15个参数,至少需要8个控制点,对式(2)~式(11)进行最小二乘法的变换,表达式为
U=(B)TB)-1BTV
设定最小差值为终止条件,计算过程采用不断的迭代的方式。如果镜头不考虑畸变参数,则直接根据Li系数就可以求解内方位元素,计算式如下
(4)
2.2 地下管线单像摄影测量原理
PDA通过WiFi远程控制CCD镜头拍照获取单张井下像片,基于此进行单张像片解算。将激光器与镜头主光轴严格设置为平行,此时已知激光器和镜头中心的基线长度为h,CCD镜头焦距为f,依据共线条件最简方程式进行单张像片解算。共线条件最简方程式表达为
(5)
根据h和激光点在像片上的投影,可得
(6)
可以解得单张像片上像点的物方坐标
(7)
式中,(XA,YA,ZA)为目标点的空间坐标,(ui,vi)为对应物方点的像点坐标,f为焦距,va为激光线所在的像片纵坐标。
该方法是基于平面的单像测量方法,所以拍摄时要尽量保持镜头平面与目标平面平行。
2.3 地下管井直径测量
地下管井直径测量具体操作步骤是:
1)打开CCD镜头开关,打开激光器开关,连接平板的应用APP程序,连接好无线网络,手持绝缘伸缩探测杆放入井口下,通过多角度旋转,可以实时查看井下设施分布情况,将镜头对准待测物体,保证激光点和待测物体处于同一平面、同一固定高度(影像中的激光点和镜头中心保持Y方向高度不变);
2)选择好待测管井后点击拍照按钮,如图5为管井测量界面;

图5 管径测量界面
3)打开手机中的单片摄影测量计算软件,将拍摄好的图片加载到界面中,手指将红色十字线触摸移动到图片中激光点,点击图片中“激光点”按钮,然后将红色十字线触摸移动到待测管径的一边,点击“测点A”按钮,最后再次将红色十字线触摸移动到待测管径的另一边,点击“测点B”按钮,最后屏幕显示测量值 。如图为管井测量结果解算界面,管径测量原理如下:根据式(5)—式(7)可以得到相片的内方位元素坐标,得到最简式:
(8)
(9)
因此得到平面上的物方坐标,那么便可计算管径的真实大小。Xi,Yi代表物方坐标,f为相机检验后的焦距,ui,vi,Zi为管井的像点坐标
2.4 地下管井小室长度和宽度测量
地下管井小室长度和宽度测量操作步骤:
1)将测量仪器和图像采集软件调整成工作状态;
2)将探测杆紧贴圆形管井口内壁,待预览界面显示仪器和小室一侧墙壁平行时点击拍照按钮,顺时针旋转90°,点击拍照按钮,如图6为地下管井小室长度和宽度测量界面;

图6 井室长宽测量界面
3)再次旋转90°(保证操作开始紧贴井口内壁位置不变),点击拍照按钮;
4)再次旋转90°,和前3次操作步骤相同,这样就完成了360°的图片采集工作。如图6为小室长度和宽度测量解算界面和测量原理示意图。
测量井室长宽测量原理可以利用相机检后的焦距得到式(10)
(10)
经过变形后为
(11)
式中:H为摄影基线长H,M为基线投影距离,L为拍摄距离,f为相机焦距,λ为固定比例系数,u0,ug,v0,vg分别为相片待测物体点坐标。
3 实验结果与分析
3.1 地下管井直径测量试验
为了验证摄影测量仪的地下管线直径测量功能和测量精度,经过相关部门的允许,在北京市海淀区北清路永丰基地展开试验。分别利用不同的大小的地下管井对仪器的地下管井直径测量功能进行实验。包括电信井,污水井,雨水井,上水井,下水井,电力井,工业井等。用人员拿着合尺下井和用摄影测量仪器分别进行直径测量解算实验,以合尺测得的数据为真实值和摄影测量仪器测量数据进行对比,利用相对误差公式进行计算,如表1所示,为摄影测量仪器地下管井直径测量相对误差。在18组测量中,相对误差为1.10%~3.67%,符合地下管线测量标准。
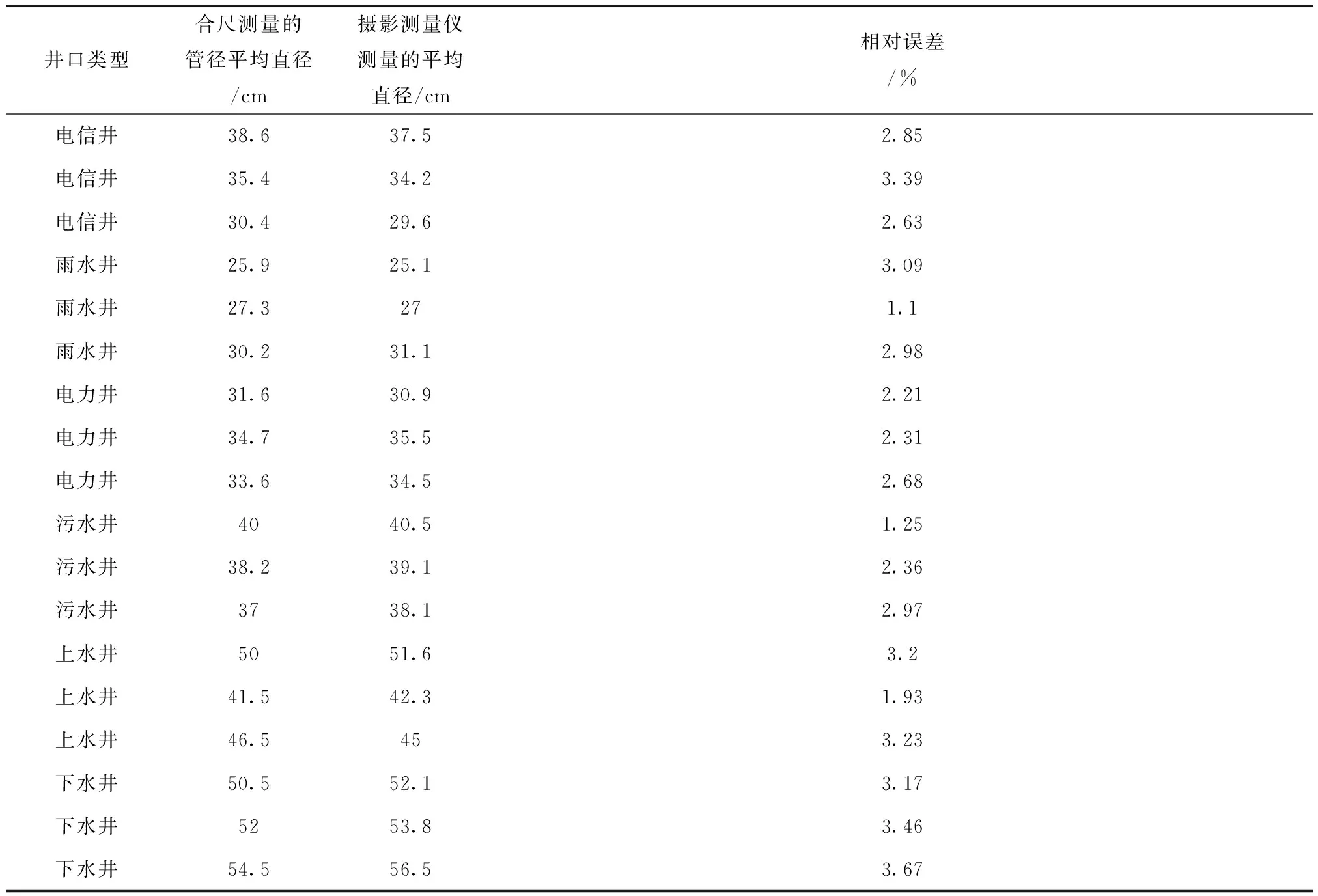
表1 摄影测量仪管井直径相对误差
3.2 井室长宽测量试验
验证摄影测量仪器的地下管线长宽度测量功能和测量精度,采用与验证摄影测量仪地下管线直径测量相同的方法。如表2所示,为摄影测量仪器地下管井井室长宽测量相对误差。在18组测量中,相对误差为1.22%~2.31%,符合地下管线测量标准。
3.3 结果误差分析
通过对3.1试验结果分析,在2.1中对CCD镜头相机进行内方位元素和畸变参数获取。非测量相机并不能严格保证焦距,相机本身带有变焦杆,可调焦距,工作时将相机的变焦杆设置为固定焦距,应对相机工作时的轻微变焦造成的内方位元素浮动。另外,仪器本身像主点和激光点平行问题也会造成一定的误差,对此在仪器加工时进行了严格的规定,尽量缩小误差。在拍摄时,仪器和物体不能保证严格平行,可通过观察影像调整。在软件解算时,坐标点的选取也会影响测量结果。通过实际工作应用表明,该仪器试验结果满足国家城市地下管线普查中管井测量工作的精度要求。
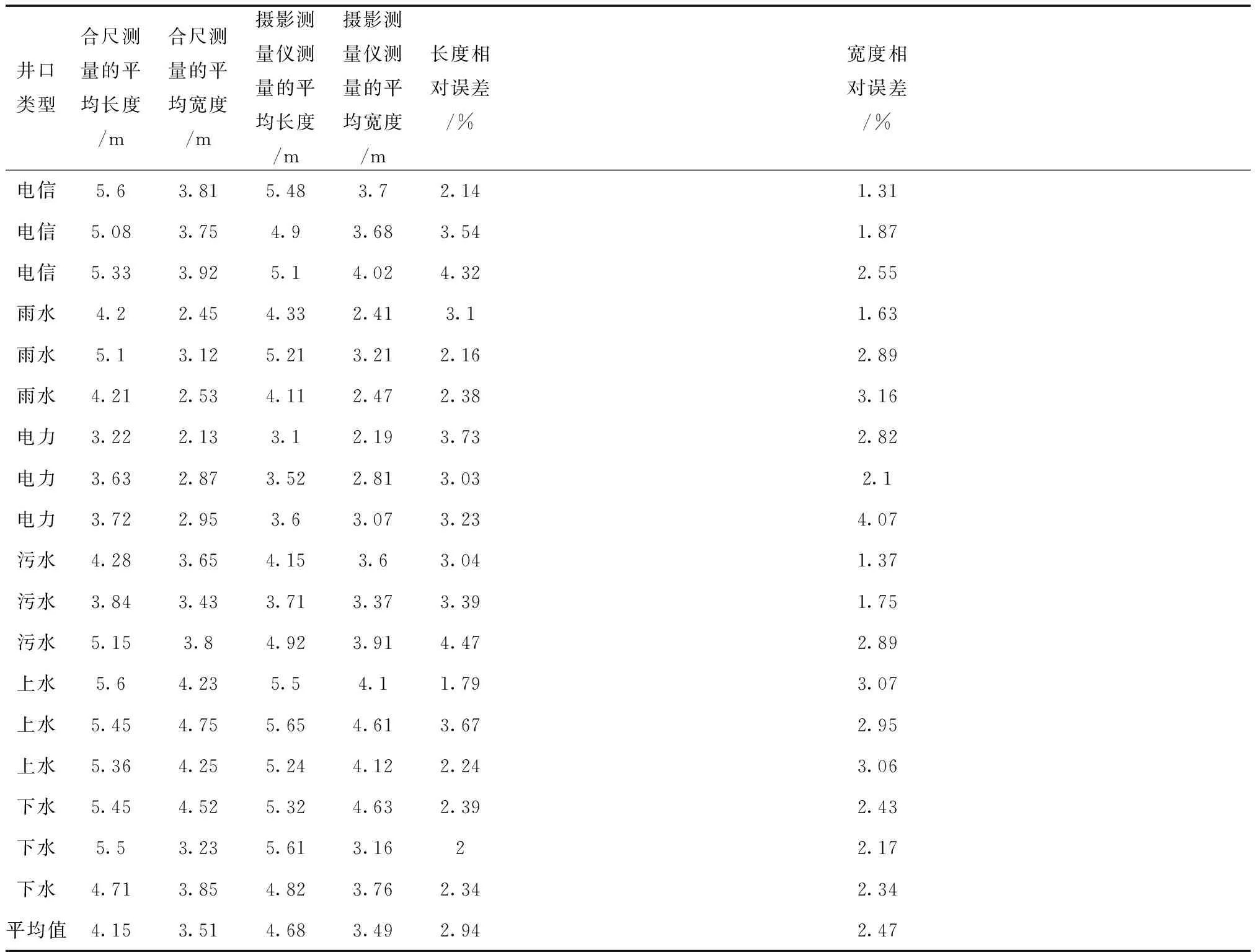
表2 摄影测量仪测量井室长宽相对误差
4 结 论
本文研制了一种由CCD镜头、激光器、光源笔、PDA、云台和探测杆低耦合成的摄影测量仪,根据摄影测量学原理,利用图片处理技术和安卓开发技术,满足了城市地下管井测量工作中设备的需求。本文详细阐述了摄影测量仪的功能原理和作业方式,在地上便可测量,改变了测量人员的传统工作模式,并通过实际工作进行了试验和验证,地下管井直径测量精度达97.31%,井室长度和宽度测量精度为97.06%、97.53%。满足国家城市地下管线探测技术规程的精度要求,该仪器可以在城市工程测量中推广使用。
[1] 王鹏,李春风.基于PDA的管线数据采集手簿开发[J].科技资讯,2010(10):53-54.
[2] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社, 2012.
[3] 冯仲科 森林观测仪器技术与方法 [M].北京:中国林业出版社,2015.
[4] 冯仲科,赵春江,聂玉藻,等.精准林业[M].北京:中国林业出版社,2001.
[5] 徐伟恒,冯仲科,苏志芳,等.手持式数字化多功能电子测树枪的研制与试验[J].农业工程学报,2013,29(3):90-99.
[6] 赵芳,冯仲科,高祥, 等.树冠遮挡条件下全站仪测量树高及材积方法[J].农业工程学报,2014(2):182-190.
[7] 杜良法,李先军.复杂条件下城市地下管线探测技术的应用[J].地质与勘探,2007(3):116-120.
[8] 黄晓东,冯仲科,解明星,等.自动测量胸径和树高便携设备的研制与测量精度分析 [J].农业工程学报,2015,31(18):92-99.
[9] 邱梓轩,冯仲科,蒋君志伟,等.森林智能测绘记算器的研制与试验[J].农业机械学报,2017(4):1-12.
[10] 黄晓东,冯仲科.基于数码相机的样木胸径获取方法[J].农业机械学报,2015(9):266-272.
[11] 冯仲科,王佳.一种测树型超站仪及其使用方法:102466476A[P].2012-5-23.
[12] 冯仲科,邱梓轩.一种摄影相机焦距及灭点的测算方法:106225773A[P].2016-12-14
[13] 高祥,冯仲科,王智超.基于电子经纬仪立木无损精测技术的干形指数研究[J].农业机械学报,2015(1):299-305.
[14] 冯仲科,姚山.全站仪量测树高方法:101021416[P].2007-08-22.
[15] 徐伟恒. 手持式超站测树仪研制及功能测试研究[D].北京: 北京林业大学,2014.
[16] 冯仲科,刘金成,邱梓轩.一种望远镜协同智能手机及电子测距仪远程摄影测算方法:106248052A[P].2016-12-21.
[17] 侯鑫新,谭月胜,钱桦,等.一种基于单CCD与经纬仪的树木胸径测量方法[J].计算机应用研究,2014(4):1225-1228.
[18] 樊仲谋,冯仲科,李亚东,等.基于双目相机的森林样地调查方法研究[J].农业机械学报,2015,46 (5):293-299.
[19] 刘国安,黄同新.平板电脑的地下管线数据采集系统应用[J].中华建设,2016(6):130-131.
[20] 郑碧娜,江泽涛,吴敏.一种基于立体像对稠密匹配的三维重建方法[J].中国体视学与图像分析,2009(2):187-191.
[21] 陈鼎,黄韬勇,孙健,等.地下管线测量成果内业质量检查程序开发[J].江西测绘,2012(2):4-5,8.
[22] 冯仲科,赵英琨,邓向瑞,等.三维前方交会法测量树高及其精度分析[J].北京林业大学学报,2007(增2):36-39.
