机器人实现未知参数下的曲面跟踪和恒力控制的研究**
2018-07-20赖火生陈新度杨宗泉
赖火生 吴 磊 陈新度 杨宗泉
(广东工业大学机电工程学院,广东广州510006)
随着制造业的发展机器人与环境接触的工作越来越多,比如打磨、抛光和装配。传统的工业机器人是基于位置控制的,并没有力控制的能力。当我们使用机器人打磨工件时,如果打磨力太大容易导致工件的损坏,但是打磨力太小又不能达到打磨的效果。因此,传统的工业机器人难以完成具有接触力要求的工作,这大大限制了机器人的应用范围。针对这个问题很多学者专家提出了许多让传统机器人具有力控制功能的解决方案,其中用得最多的方法是阻抗控制和力/位混合控制。
文献[1]提出采用最小二乘法估计环境刚度,并使用模糊控制器调整阻抗控制器的参数以适应环境刚度和阻尼的变化从而实现力控制。文献[2-4]使用间接自适应方法在线估计环境参数,基于环境参数的估计来计算所需的参考位置,通过参考位置轨迹的适当选择间接地控制接触力。然而,该方法没有接触力的闭环反馈,不能保证高的力控制精度。文献[5]的墨西哥国立自治大学Javier Pliego-Jiménez等人提出了一种未知环境下机械手与刚性表面接触的自适应方案,通过接触力的反馈来估计环境的参数,并通过球面力追踪实验验证了方案的可行性。文献[6-8]通过神经网络算法补偿由于环境刚度不确定性而对阻抗控制所造成的影响,该方法虽然能实现比较精确的力控制但是计算量大并且存在不确定性。以上文献介绍的方法有的缺少力闭环的反馈检测,难以保证高的接触力控制精度;有的计算和实现比较复杂,工程化比较困难。因此,本文在传统的阻抗控制基础上结合PID控制,提出了基于模糊PI的力闭环阻抗控制方法。该方法具有力闭环反馈并且工程实现比较容易。
1 基于模糊PI的阻抗控制原理
机器人与环境接触的阻抗模型等效为质量-弹簧-阻尼系统,如图1所示。
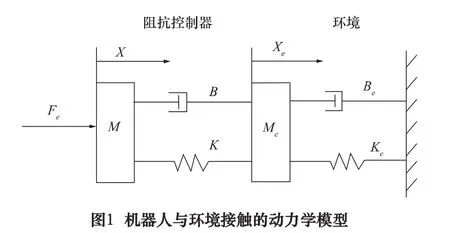

式中:Fe为机器人与环境的实际接触力;Fd为机器人与环境的期望接触力;X为机器人末端的实际位置;Xd为期望位置;M是为机器人的理想质量矩阵;B为理想阻尼矩阵;K为理想刚度矩阵。式(1)变形为:

阻抗控制的数学模型可以表示为:
将式(2)对时间求积分得:
期望位置Xd为常量:

所以综合式(3)和式(4)可以得到:

将式(5)对时间再次积分得到:

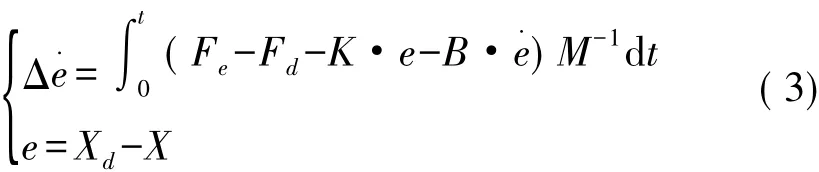
式(6)中的ΔX就是通过测量机器人末端的接触力与期望接触力的偏差,采用阻抗控制算法得到的机器人末端的位移修正量。
由式(1)可以看出如果机器人末端的实际接触力与期望接触力相等就必须满足机器人末端的实际位置与期望参考位置相同。然而理想的期望参考位置需要精确地估计环境的刚度,所以往往难以获得理想的效果。因此本文引入了基于模糊PI的力闭环反馈环节,根据接触力偏差调整机器人末端的实际位置,从而不需要精确的期望参考位置。基于模糊PI控制的力闭环阻抗控制框图如图2所示。
在原来的二阶阻抗系统中加入基于模糊PI控制的力闭环反馈环节,保证了机器人能达到期望的接触力,并且具有良好的鲁棒性。从图2控制系统框图可以看出本文使用了双积分系统,通过机器人末端位置的控制来间接实现接触力的控制。
2 模糊PI控制的实现

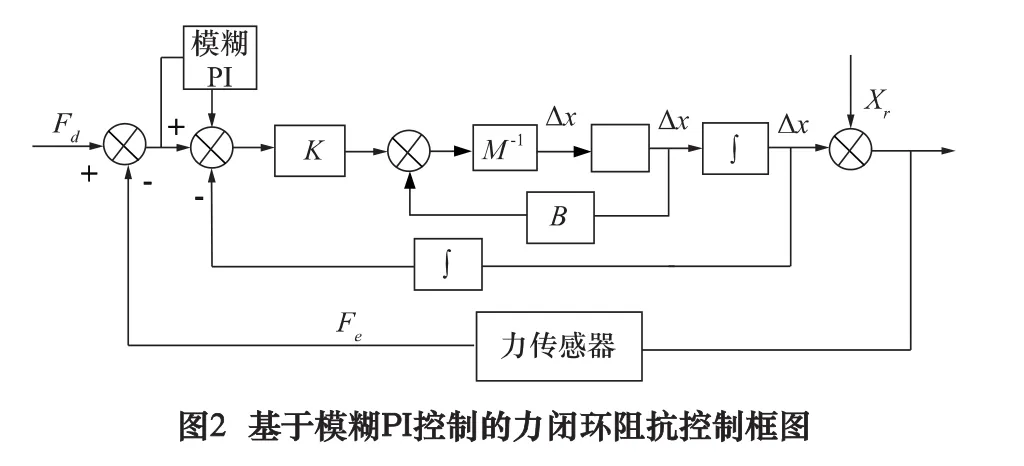
模糊控制器的论域取值为[-3,3],模糊集合为{“正大(PB)”,“正中(PM)”,“正小(PS)”,“零(ZO)”,“负小(NS)”,“负中(NM)”,“负大(NB)”}7个等级。选择三角形分布函数作为模糊控制的隶属函数,如图3所示。
传统的PID控制参数是固定的,而机器人系统是时变、非线性和受外部干扰的,所以为了达到更好的控制效果,把传统的PID控制结合模糊控制方法,使得PID控制参数是可调的,以适应系统的特性。本文采用二维模糊控制器,模糊控制器的输入为实际接触力与期望接触力的偏差和偏差的变化率,输出为PID参数的调整量。接触力误差E和误差变化率Ec定义如下:
根据系统的需求制定模糊控制的规则表,如表1和表2所示。

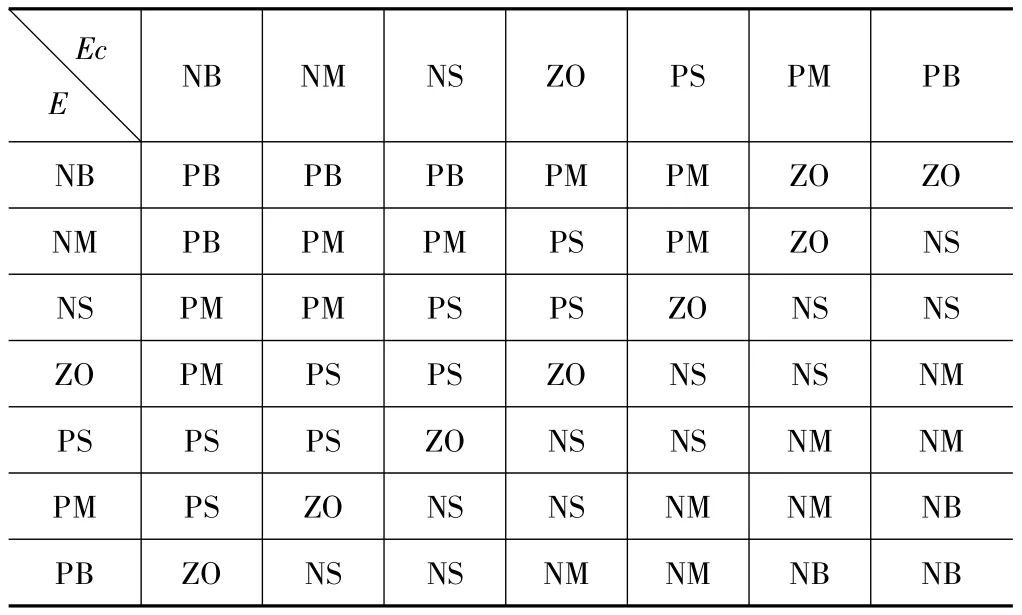
表1 Δkp模糊控制规则表
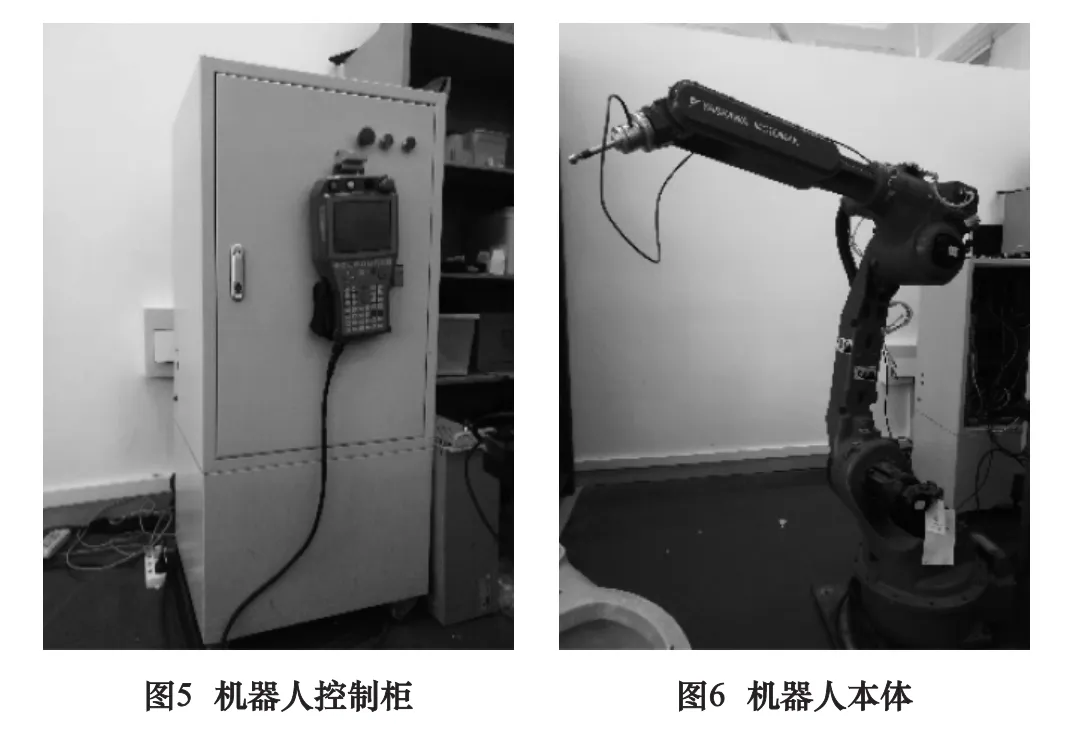

表2 Δki模糊控制规则表
通过设定的模糊控制规则来实时修正PID控器的参数,改善了PID控制的效果。
3 实验平台介绍
为了验证基于模糊PI的力闭环阻抗控制算法的效果,本文基于固高的控制器和安川的机器人本体搭建了机器人的实验平台,并在机器人末端法兰盘上安装一个六维力传感器开发机器人力控制系统。机器人力控制的系统结构,如图4所示。
为满足实验要求,本实验采用德国ME的FCK6D40六维力传感器,表3是FC-K6D40传感器的部分参数。

表3 FC-K6D40传感器参数
4 实验结果与分析
在实验中我们通过机器人末端与曲面连续接触的力控制实验来验证基于模糊PI的力闭环阻抗控制算法,如图7所示。
实验过程如下:机器人末端从与曲面没有接触的上方开始运动,然后经过一段时间开始与曲面接触,这时给定进给速度,机器人能根据实际接触力与期望接触力的偏差调整末端轨迹使得机器人末端能够跟踪曲面的轮廓并实现恒力控制。在机器人末端与曲面接触的力控制实验中,阻抗控制器的惯性矩阵取值为M=40I,阻尼矩阵B=12 000I,刚度矩阵K=500I。模糊PI控制器中的比例系数kp=1.15,积分系数ki=0.035。

图8是机器人末端跟踪曲面轮廓时的接触力,图9是机器人末端Z方向上的轨迹,图10是机器人末端在Y方向上的轨迹。

从图8可以看出机器人末端与曲面接触时,实际接触力与期望接触力之间的偏差为±1 N,实现了精确的力控制,证明了本文提出的阻抗控制算法的有效性。结合图8可以看出机器人末端与曲面开始接触的时间大概在4.8 s附近,并且在刚接触阶段会有一个从刚接触到稳定在期望接触力的一个调节过程。从图10可以看出当机器人末端与曲面接触稳定在期望接触力时就开始沿着Y方向匀速运动,沿着Y方向运动的速度为5 mm/s。从上述图表数据中,相比于开环的控制系统,本设计系统具有响应速度快,调节力度更精准的优点。
表4是目标压力为20 N的条件下,机器人末端随着工件曲面变化,使恒力装置实时采集的实验数据。由数据看出,本次实验在Y方向的有效行程内,恒力装置保持机器人末端接触力在20 N处波动,误差范围为±0.5 N,相比于气压恒力装置控制系统的误差缩小了0.5 N。
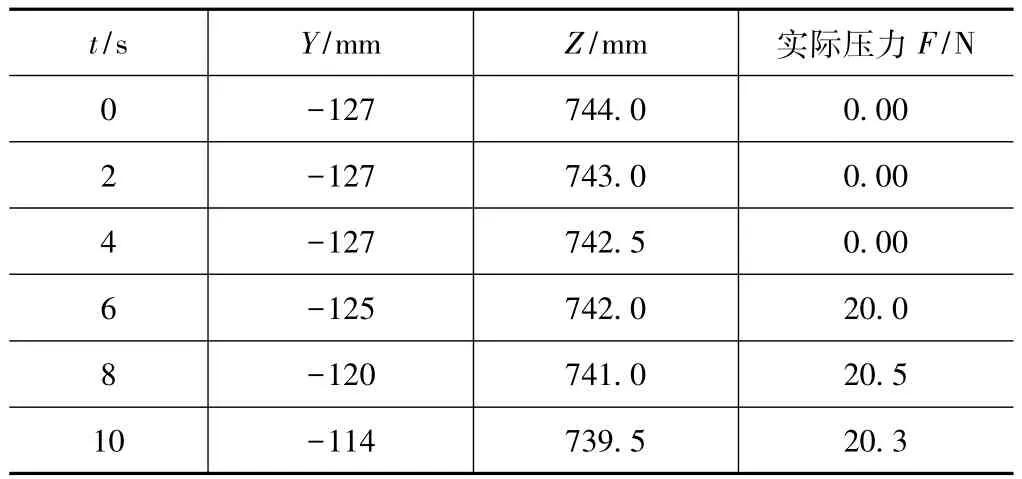
表4 位置与力的变化
5 结语
本文针对传统阻抗控制实现力控制需要精确地知道环境的刚度的问题,提出了基于模糊PI的力闭环阻抗控制方法,该方法具有闭环的力反馈,在不知道环境刚度的情况下也能够实现精确的力控制。通过机器人末端与曲面接触的轮廓跟踪和恒力控制,验证了该方法的有效性。本文提出的控制方法易于实现,在机器人打磨、抛光和擦洗方面具有广阔的应用前景。
