BM3D去噪算法在带钢表面图像中的应用研究
2018-07-19孔建益王兴东
吕 琳,汤 勃,孔建益,王兴东
(1.武汉科技大学 冶金装备及其控制教育部重点实验室,湖北 武汉 430081;2.武汉科技大学 机械自动化学院,湖北 武汉 430081)
1 引言
在带钢生产过程中,由于工作环境和钢板表面材质的影响,在钢板表面图像上会出现噪声等无关信息,这样会对带钢表面检测产生严重的影响,因此钢板表面去噪化对于图像后处理显得十分重要。文献[1]提出了 BM3D(Block-Matchingand3-DFiltering)算法,该算法是一种非局部多点型算法,被认为是目前最好用的去噪方法之一。BM3D算法去噪后的图像不管是在客观评价标准上还是在主观的视觉质量上,效果都很好。
2 BM3D算法介绍
BM3D算法是目前在视频和图像降噪中处理效果最好[2]的算法之一,该算法主要分成二步:首先由块匹配的矩阵变换得到一个基础估值,其次通过得到的基础估值对噪声图像进行滤波,最后用聚集[3]方法对重叠的块进行重新估值和加权平均从而得到一个最终图像。块匹配的基本原理[4]是:把带钢表面图像缺陷划分成几个特定大小且相互没有重叠的部分,并使每个部分里的每个像素的位移量都相同,然后选取特定的搜索区域,并在搜索区域内用制定的匹配准则搜索与当前相似的块,这就是匹配块[5]。在这里用I来表示含有噪声的图像。用P来表示带钢图像中划分好的块,设置P的块大小为KXK,用Q来表示图像I的搜索块。在图像I当中,使用图像左上角像素点用来代表该操作块,因此有P∈I、Q∈I。在该过程当中,依据从上至下,从左至右的顺序方法原则,分割好块和对块进行搜索。首先要对带钢图像划分成为大小相等的块,然后按一定的顺序方式对图像中的每个块进行块匹配处理。选取当前块P为参考块,以P为中心点,以K为直径的区域作为其搜索区域,故有:

式中:λ3D—硬阀值滤波的阀值参数;σ—高斯白噪声参数;X—图像块的矩阵值。
图像块在搜索过程中二者之间的距离d有如下公式:

式中:d—图像中二个块之间的距离。
式中的分子表示的是图像中二个块之间的矩阵差值的模量值,公式中的分母表示该操作块的大小。用式(2)计算得出的每个块的距离并将这些块的距离集合到sp,则有:式中:τd—距离阈值。

集合SP表示的意思是:当块中的P与Q之间的距离不大于τd时,此块就属于该集合。最后将SP中的矩阵块集合按照d(P,Q)大小顺序排列,最终就得到了大小为的三维矩阵TS,
P

式中:τ3D—对三维矩阵TSP进行三维酉变换[6]。
该去噪方法的优势在于可以在不损耗任何能量的情况下,将带钢图像里的噪声和图像里的有用信息区别开来。能正确的区分出有用信息和噪声等信息正是由于图像的大部分有用信息都处于三维矩阵TSP能量的顶点处,而噪声等无关信息常常处于在三维矩阵TSP的底部处,通过这一特质,可以通过变换域的硬阈值进行滤波,这样既能够在有效去除噪声的同时也能保留绝大部分有用的图像信息。当完成了噪声图像的滤波后,每个块将会有一个估计值与之相对应,同时每个像素也会有一个估计值[7]与之相对应。用NP来表示滤波后矩阵系数中的非零数值,用wp来表示当前块的基础权值的估计值为:

通过式(5)计算出三维变换域滤波的基础估计值之后,从而可以得到最终的估计权值[8]如下:

该式子看出,所得的估计权值越大,其真实图像中夹杂的噪声就越小。最终一个真实的图像是通过计算出各个重叠的块的平均估计值得到的。
3 BM3D算法中的重要参数对带钢表面缺陷图像去噪的影响
研究了BM3D算法中几个重要的参数(搜索区域半径K、搜索距离阈值τd、硬阈值λ3D)对带钢表面常见的缺陷图像去噪的影响,并用信噪比PSNR[9]和运行该算法所需要的时间(TIME)为其评价标准。
3.1 搜索区域半径K值对带钢表面缺陷图像去噪效果的影响
在研究搜索半径K值对图像去噪效果时,需去除其他几个参数对本实验的影响,设定高斯噪声图像参数σ=15、硬阈值λ3D=3、搜索距离阈值τd=3000。由表1综合考虑认为,当K=32时该算法的去噪效果是最显著的。
3.2 搜索距离阈值对带钢表面缺陷图像去噪效果的影响
在研究搜索距离阈值对图像去噪效果时,设定高斯噪声图像参数σ=15、硬阈值λ3D=3、搜索半径K=32。由表2综合考虑认为,当τd=4000时该算法的去噪效果是最显著的。
3.3 硬阈值对带钢表面缺陷图像去噪效果的影响

表1 不同的K值对图像去噪的效果影响Tab.1 The Effect of Different K Values on Image Denoising
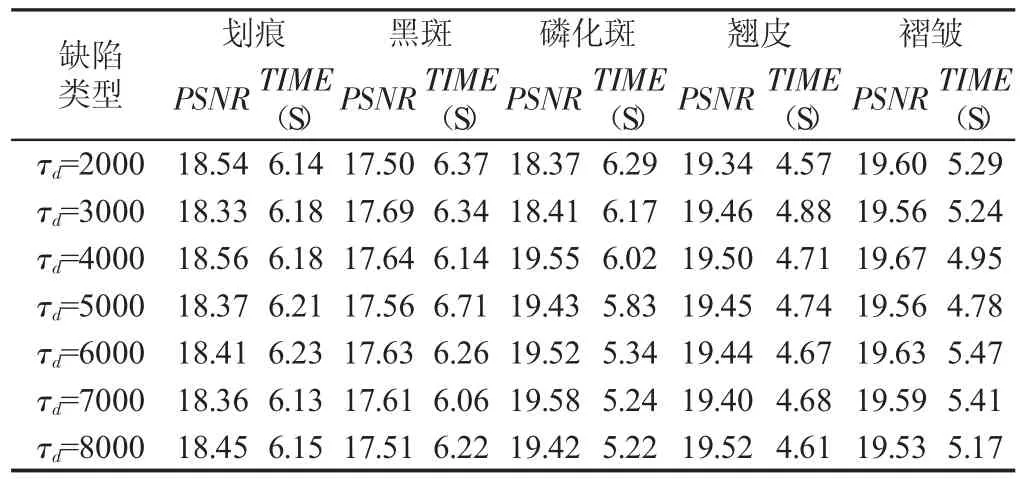
表2 不同的值对图像去噪的效果影响Tab.2 The Effect of DifferentValues on Image Denoising

表3 不同的值对图像去噪的效果影响Tab.3 The Effect of DifferentValues on Image Denoising
在研究硬阈值对图像去噪效果时,设定高斯噪声图像参数σ=15、搜索距离阈值τd=4000、搜索半径K=32。由表3综合考虑认为,当λ3D=2.5时该算法的去噪效果是最显著的。从上述实验结果表明,当选取BM3D算法里的搜索半径值K=32,搜索距离阈值τd=4000,硬阈值λ3D=2.5时,该算法对表面缺陷图像去噪效果最好。
4 BM3D去噪算法运用在带钢表面缺陷图像的实验效果
本实验以带钢生产过程中的钢板常见表面缺陷为例,当分别选取高斯噪声[10]图像参数σ=15和σ=30,BM3D算法搜索半径值K=32,搜索距离阈值τd=4000,硬阈值λ3D=2.5时,用BM3D算法与均值滤波、中值滤波等经典算法进行比较且用信噪比PSNR和均方根误差MSE对图像去噪效果进行标准评价。

图1 磷化斑缺陷图像去噪效果图Fig.1 Image Denoising Effect of Phosphating Spot Defect
从图1当中可以看出,磷化斑缺陷图像在加有高斯噪声σ=15下的图像,如图1(a)所示;用均值滤波对带有轻微噪声σ=15的磷化斑缺陷处理后的图像,如图1(b)所示;用中值滤波对带有轻微噪声σ=15的磷化斑缺陷处理后的图像,如图1(c)所示;用BM3D算法对带有轻微噪声σ=15的磷化斑缺陷处理后的图像,如图1(d)所示;磷化斑缺陷图像在加有高斯噪声σ=30下的图像,如图1(e)所示;用均值滤波对带有轻微噪声σ=30的磷化斑缺陷处理后的图像,如图1(f)所示;用中值滤波对带有轻微噪声σ=30的磷化斑缺陷处理后的图像,如图1(g)所示;用BM3D算法对带有轻微噪声σ=30的磷化斑缺陷处理后的图像,如图1(h)所示。在图1(b)中,均值滤波处理后的图像过于平滑,与带钢表面图像预处理的要求相比,对比度较低、边缘信息丢失很大并且自身含有很大的噪声。在图1(c)中用中值滤波对这类缺陷图像处理后,虽然其性能强于均值滤波,但是该滤波图像相对于原图像而言,其对比度较低且边缘信息丢失也很大。在图1(d)中用BM3D算法对这类缺陷图像处理后,不仅能有效的去除了噪声,还能很好的保留了缺陷表面的边缘和纹理等细节信息。即使在高噪声σ=30的缺陷图像情况下,BM3D算法相比于其他二种去噪算法,去噪效果也很显著。


图2 翘皮缺陷图像去噪效果图Fig.2 Image Denoising Effect of Warping Defect
相似的,从上图2结果中可以看出,BM3D算法优势也显而易见。均值滤波算法和中值滤波算法均不能对噪声图像里的噪声有效的去噪,但是BM3D算法不仅去除了高噪声,同时也对翘皮缺陷图像的一些重要信息得到了保留。从表4中可以看出,BM3D算法的PSNR值最大和MSE值最小,说明该算法图像失真少,图像去噪效果最好。综合上述实验结果表明,BM3D算法在处理各种带钢表面缺陷的图像上取得了不错的去噪效果。

表4 几种不同去噪算法对常见带钢表面缺陷图像去噪效果对比Tab.4 Comparison of Denoising Effect of Several Different Denoising Algorithms on Common Strip Surface Defect Image
5 结语
正是因为表面缺陷对带钢的质量有着极其重要的影响,所以一种好的图像去噪算法对于后续的带钢表面缺陷的提取和识别起着重要的作用。由于传统的去噪算法作用于带钢表面缺陷图像所产生的不好的效果,研究了一种BM3D的算法并把该算法运用于带钢表面缺陷图像检测上,通过对该算法中的几个重要参数的实验,找出该算法中最适合带钢表面缺陷图像去噪的参数值。
通过设定好BM3D算法中的参数值,用该算法与均值滤波、中值滤波等算法进行比较,从实验结果表明,无论是从显示图像效果看来还是以客观图像质量评价标准来看,BM3D算法不仅达到了很好地去噪效果,同时也很好的保留了缺陷表面的边缘和纹理等细节信息,为后续的图像分割与识别等步骤提供了有利的条件。
