目标监测传感器网络中锚节点优化布设
2018-07-19宋树伟
汪 晗,王 坤,张 磊,宋树伟
(1.陆军工程大学 指挥控制工程学院,江苏 南京 210007;2.94860部队 自动化站,江苏 南京 210018;3.陆军参谋部,北京 100042)
0 引 言
传感器网络定位技术[1-3]作为无线传感器网络的核心支撑技术得到学术界的广泛关注。为了获得网络中传感器节点的绝对位置,通常需要布设一些位置已知的锚节点,其它位置未知的节点(待定位节点)通过测量与锚节点之间的位置约束关系,进而采用定位算法解算出自身的位置。目前传感器网络定位的研究工作大多集中于定位算法的设计与改进[4-7],这些定位算法通常考虑在锚节点的数量和布设位置已知的情况下,如何提高定位算法的位置解算精度。然而从定位系统的架构层面而言,传感器网络中如何布设锚节点是首要解决的问题,对整个网络的节点定位精度具有重要影响。
目前传感器网络锚节点优化布设已成为节点定位技术研究的重要方向,具有较大的实用价值。例如在桥梁健康监测应用中,通过优化布设少量传感器节点,对桥梁的关键部位进行实时的形变监测,可以提前发现桥梁病害,降低桥梁事故概率。当锚节点布设不佳,例如锚节点与待定位节点构成的几何形状较差时,无论采用何种定位算法,节点定位精度的提高都将受限[8]。目前锚节点优化布设方面的研究工作大多着眼于确保节点可定位[9],较少考虑锚节点几何形状对定位精度的影响。优化布设工作大多基于搜索方法[10]来提高定位精度,即在锚节点布设组合空间内搜索优化布设方案,而基于理论推导的锚节点优化布设工作较少。
本文首先从理论上分析研究了锚节点几何形状对定位精度的影响,基于到达时间TOA测距推导出几何精度因子GDOP[11](geometric dilution of precision)表达式,揭示了同一定位算法在测距误差相同的情况下节点定位精度不同的本质原因。给定待监测目标点,首先从理论上推导出锚节点最优几何排列需满足的充要条件,并仿真推导出锚节点几何面积对目标位移监测精度的影响。大规模仿真实验表明,在相同的测距误差分布和定位算法下,锚节点优化布设算法与随机布设算法比较而言,前者能够显著提高定位精度,在目标定位监测等应用中具有实用价值。
1 几何精度因子
图1表示测距误差ε相同时,由于锚节点与待定位节点的几何形状不同,将造成待定位节点的定位误差存在较大区别,如阴影所示,几何形状越好,定位误差越小,对应的阴影面积也越小。
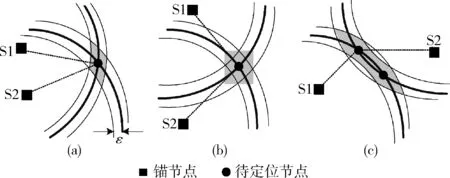
图1 定位误差
图2表示2维空间中(D=2)单节点的定位问题,p=(x,y)表示待定位节点O的真实位置,qi=(xi,yi),(i=1,…,M)表示M个锚节点的位置,锚节点与待定位节点之间的几何排列Ψ可用矩阵G来定量表示。
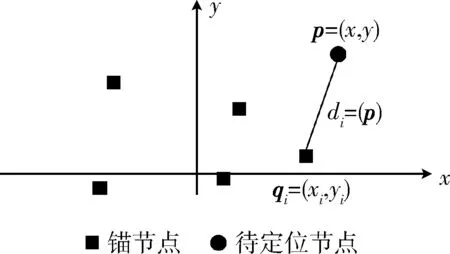
图2 二维中的定位情形


(1)
式中:v表示信号传播速度,ni表示对应于第i个锚节点的TOA测量误差。
假设测量误差n=(n1,n2,…,ni…,nM)服从均值为零的高斯分布,并且n的协方差矩阵C满秩。那么TOA的测量值τ=(τ1,τ2,…,τi…,τM)的概率密度函数(PDF)可以表示为
(2)
据此可以求出对应的费希尔信息矩阵J
J=E{[▽lnf(τ;p)][▽lnf(τ;p)]T}
(3)
其中,▽表示对p求梯度,E(·)表示对τ求期望。根据定义及式(3),待定位节点的定位误差克拉美罗下界(Cramer-Rao lower bound,CRLB)可以表示为

(4)
其中
(5)
gi是单位长度矢量,G是D×M矩阵,tr(·)表示求迹运算。
假设测量误差n是相互独立的高斯分布,且均值为零,方差为σ2,那么n的协方差矩阵C可以用式(6)表示
C=σ2IM×M
(6)
I表示单位方阵。从式(4)、式(6)可计算出待定位节点的定位误差克拉美罗下界
(7)
当定位算法是无偏估计时,σCRLB可以近似表示σp
(8)
几何精度因子GDOP定义为定位误差σp与测距误差σ的比值,见式(9)
GDOP=σp/σ
(9)
将式(8)代入式(9)可得到几何精度因子的最终表达式
(10)
由式(10)可知,GDOP与测距误差无关,仅与G有关。给定锚节点与待定位节点之间的几何排列Ψ,可根据式(5)计算出矩阵G,此时在定位误差中几何排列Ψ对测距误差σ的放大系数GDOP也唯一确定。
2 最优几何排列
本文从单跳传感器网络中锚节点的优化布设入手,考虑当网络中所有节点间的距离都在信号单跳传播范围内时,如何优化布设锚节点使得单个待定位节点的定位精度最高。
从式(8)和式(10)推导可得式(11)
σp≈σCRLB=σ·GDOP
(11)

证明:假设GGT的特征值为λi,λi>0,那么根据特征值的定义可知(GGT)-1的特征值是1/λi。由于
根据Cauchy-Schwarz不等式
所以有
(12)

由于
tr(GGT)=M
(13)
tr(GGT)=tr(λI)=λtr(I)=λD
(14)
对比式(13)、式(14)可知M=λD=>λ=M/D。

满足条件GGT=(M/D)I的矩阵G称为锚节点最优排列Ψopt。
根据式(5)中G的定义,tr[(GGT)-1]可以变形为式(15)
(15)
θi表示节点坐标系x轴正方向与第i个锚节点至待定位节点连线的夹角。
在2维定位情形下,即D=2时,我们对锚节点最优排列形式进行推导。在桥梁形变监测等目标点监测应用中,待监测点可以位于锚节点所构成的闭合区域内也可位于闭合区域外,下面分别对两种情形进行推导。
(1)待监测点位于锚节点闭合区域内
待监测目标点与锚节点的位置关系如图3所示,虚线表示锚节点形成的闭合区域,目标点O与各锚节点i(i=1,2,…,M)之间连线的夹角用θij表示。
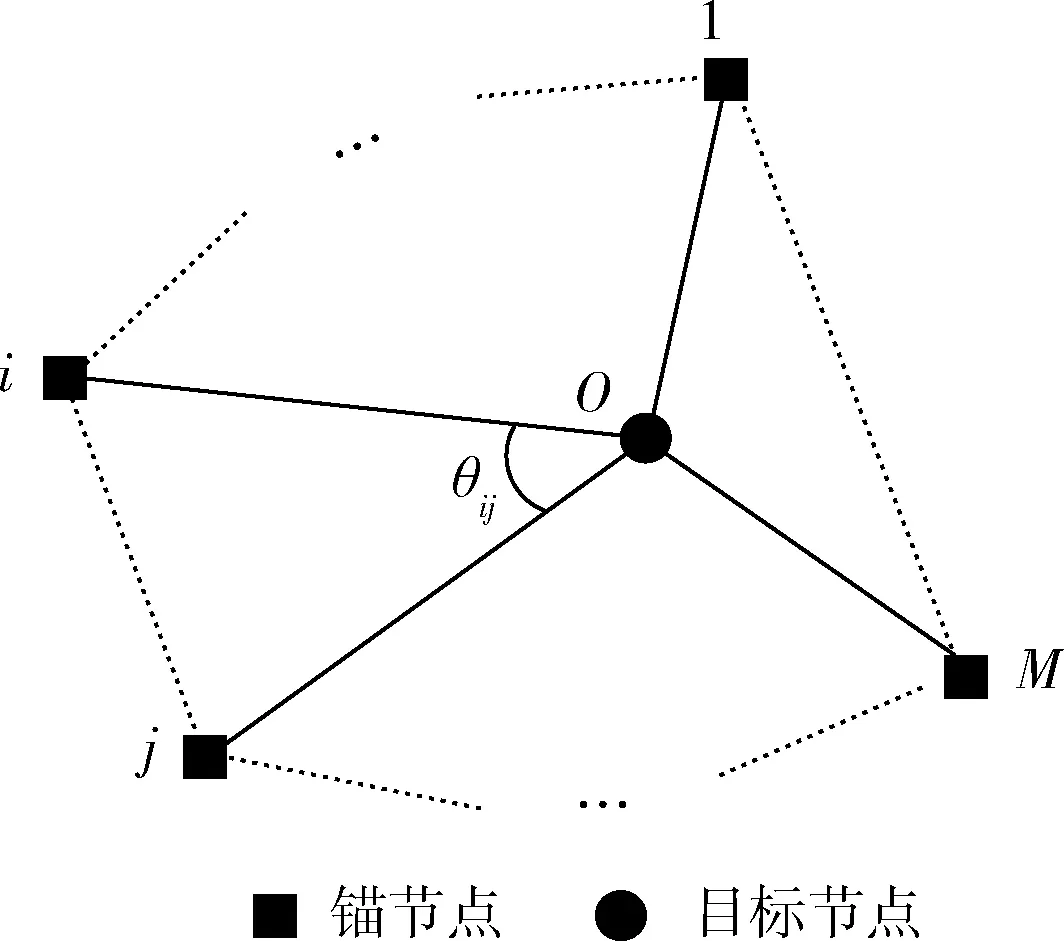
图3 待监测点位于锚节点闭合区域内
图3中,由于待监测目标节点位于锚节点形成的闭合区域内,因此显而易见相邻锚节点之间的夹角和为2π,即
θ12+θ23+…+θM1=2π
(16)
因此在二维定位情形下(D=2)寻找图3中的最优锚节点形状,等价于在式(16)的约束条件下求式(15)的最小值。我们利用拉格朗日乘数法构造如下辅助函数
(17)
(18)
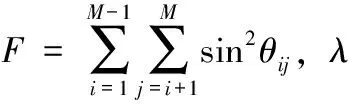
当θ12=θ23=…=θM1=2π/M时满足式(18),此时锚节点呈现均匀等角的布设形状,即锚节点与目标节点的连线平分圆周角2π。为表述简洁以目标点为中心建立坐标系,此时各锚节点的位置矢量可表示为
以M=4,D=2为例,其最优排列如图4所示,此时各锚节点的方位角为
图4 最优排列
对应的锚节点位置矢量坐标分别为:g1=[cosα,sinα],g2=[cos(π/2+α),sin(π/2+α)],g3=[cos(π+α),sin(π+α)],g4=[cos(3π/2+α),sin(3π/2+α)]。

(2)待监测点位于锚节点闭合区域外
图5表示待监测点O位于闭合区域外的情形,此时M个锚节点与目标节点连线的夹角必然存在一个最大值,其它锚节点均位于该最大夹角内,且该最大夹角为其它所有相邻锚节点间的夹角之和。在图5中θM1最大,因此有
θ12+θ23+…+θ(M-1)M=θM1
(19)
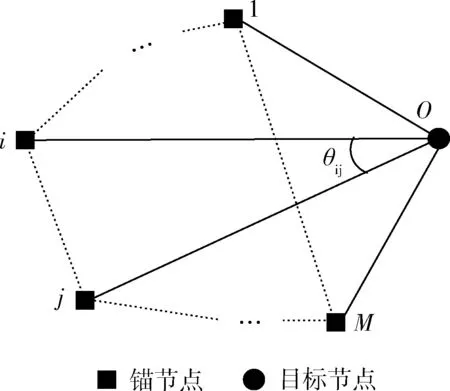
图5 待监测点位于锚节点闭合区域外
利用拉格朗日乘数法,构造辅助函数见式(20)
(20)
(21)
结合式(19)的约束条件θ12+θ23+…+θ(M-1)M=θM1(θM1<2π)可知:
(22)
以M=4,D=2为例,其最优排列如图6所示,此时各锚节点的方位角表达式见式(23)
(23)
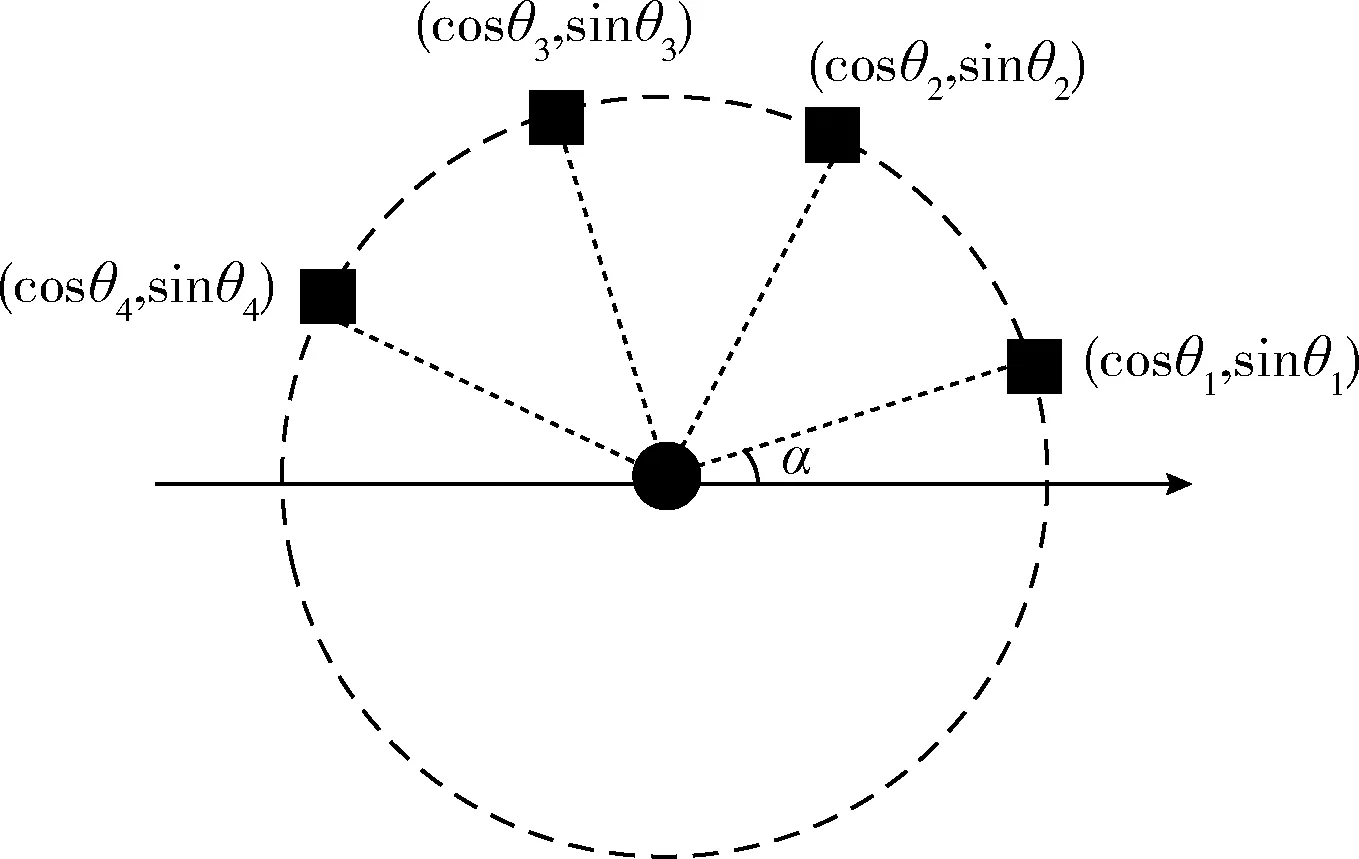
图6 最优排列

3 仿真分析
对于桥梁形变监测等静态目标监测应用中,需要对特定点进行精确的定位监测,以实时发现细微的位移形变,进而提前进行预防和拯救。前面已通过理论推导出锚节点与单个待监测点的最优几何排列形式为均匀等角布设,下面我们通过仿真进一步研究当待监测点出现微小形变时,如何优化布设锚节点进而提高待监测点的定位精度。
3.1 几何面积的影响
仿真设计如图7所示,3个锚节点与待监测点成均匀等角布设,假设待监测点在半径d=3米的圆面内发生形变,且形变概率服从均匀分布,改变锚节点与待监测点间的距离值r,进而改变锚节点的几何面积。
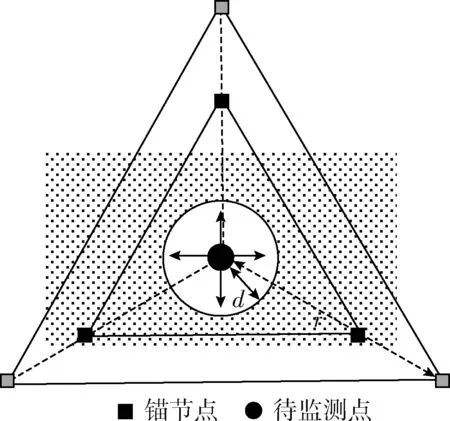
图7 仿真场景
假设测距误差服从均值为0的高斯分布N(0,δ2),δ=0.5米,且节点间的测距误差相互独立;在[5,50]米的区间内均匀改变距离值r,对于每一个r值,在圆面内等概率改变待监测点的位置,蒙特卡洛仿真N=10000次取平均定位均方根误差RMS作为距离值r对应的定位结果。
RMS的定义见式(24)
(24)
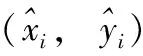
仿真结果如图8所示,从图可知,随着r值的增大,锚节点几何面积也增大,圆面区域内的定位误差逐渐变小,这带给我们的启示是:为了提高待监测点的定位精度,在锚节点几何形状不变(均匀等角布设)的情况下,几何面积起到了更大的作用,因而在锚节点优化布设时,要兼顾考虑几何面积的大小,使之覆盖尽可能大的监测区域。鉴于无线信号的传播距离及衰减特性,在应用中要综合考虑信号传播、布设环境与布设面积之间关系,优化锚节点的布设。
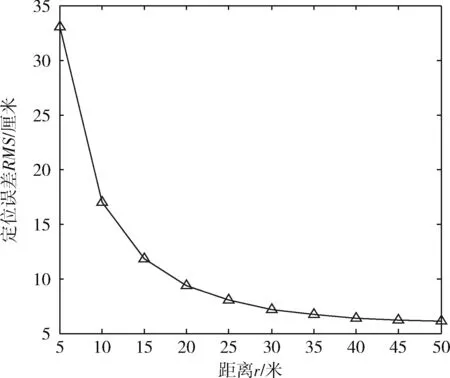
图8 锚节点几何面积对定位误差的影响
3.2 优化布设性能
前面章节已通过理论推导出锚节点与单个待监测点的最优几何排列形式:当锚节点呈现均匀等角布设时,对应的GDOP值最小;并通过仿真指出锚节点几何面积对目标位移监测精度的影响,锚节点几何面积越大,对位移监测的精度越高。下面我们通过仿真实例探讨锚节点优化布设与随机布设的定位性能差异。
仿真场景如图9所示,待监测点位于100×100米的正方形区域的中央,根据上述结论,3个锚节点的优化布设形状为均匀等夹角布设且在区域内布设的锚节点几何面积要尽量大。
图9 锚节点最优排列
假设测量误差服从均值为0的高斯分布N(0,δ2),δ在[0,2]米之间均匀取值,且节点间的测距误差相互独立;对于每一个δ值,蒙特卡洛仿真N=10000次取平均定位精度值(定位均方根误差RMS)作为测距误差δ对应的定位结果,仿真基于MATLAB R2012b软件平台实现。
锚节点在区域内的优化布设位置如图9所示。待监测点在锚节点优化布设下的定位精度与随机布设下的定位精度对比如图10所示,从图10可知,在不同的测距误差δ下,锚节点优化布设对应的定位精度明显高于随机布设的定位精度,并与定位误差CRLB接近。这表明仿真实验与理论推导相符合,对实际应用中的锚节点优化布设具有正确的指导意义。
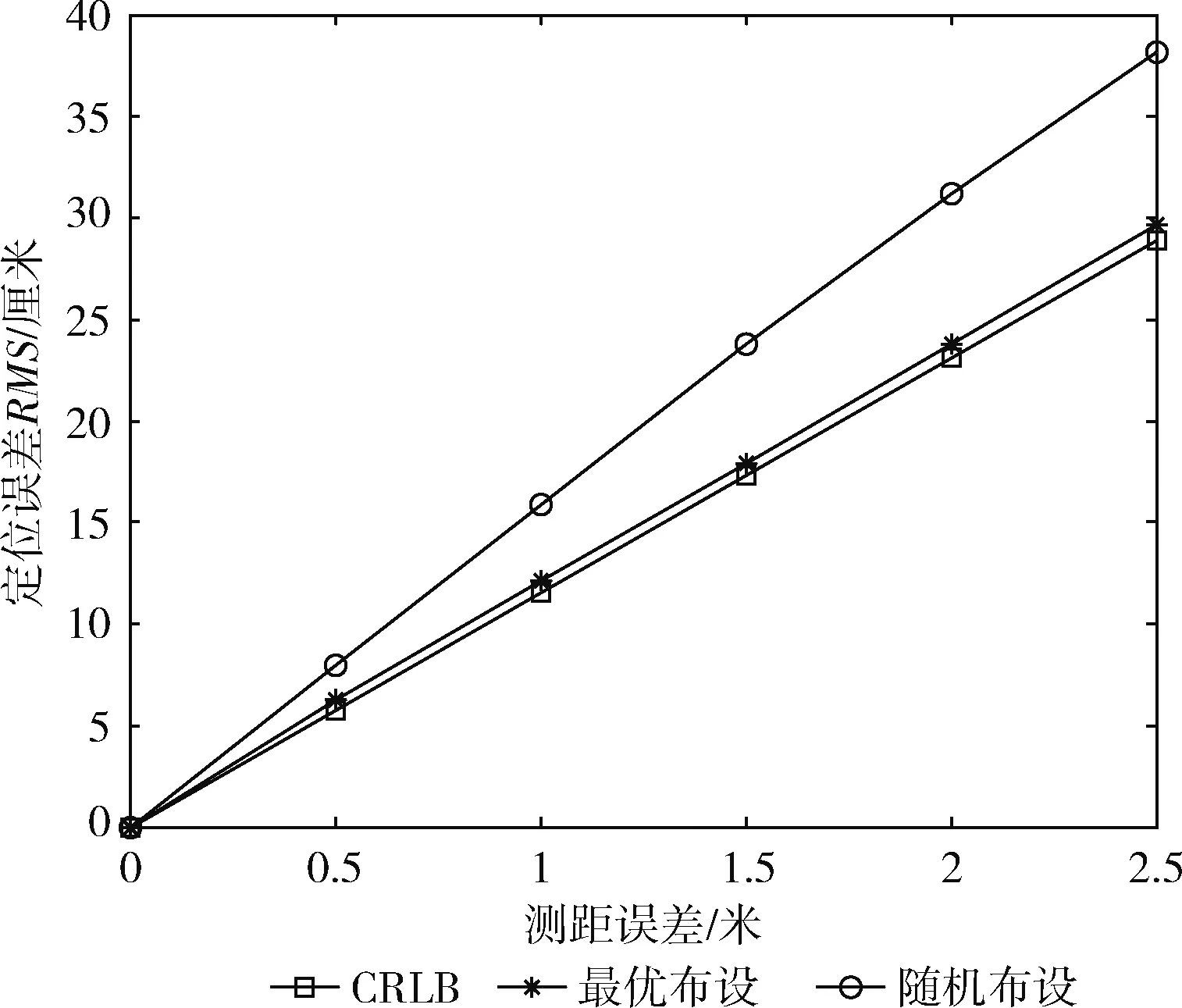
图10 定位精度对比
4 结束语
本文在单跳传感器网络中优化锚节点布设以提高待监测点定位精度,通过推导几何精度因子的表达式指出测距误差相同时,锚节点几何形状对目标节点定位误差的乘性影响。基于此从理论上严格推导出锚节点最优几何排列的充要条件,并给出最优几何排列的实例。仿真结果表明,在锚节点几何形状不变的情况下,锚节点几何面积越大,待监测点的位移监测越准确;锚节点优化布设下的定位精度远高于随机布设精度,这对监测应用中优化布设锚节点具有实际的应用价值。