太阳光压作用下空间太阳能电站的动力学响应
2018-07-14徐方暖邓子辰王博魏乙李庆军
徐方暖, 邓子辰, 王博, 魏乙, 李庆军
(1.西北工业大学工程力学系,陕西西安710072; 2.钱学森空间技术实验室,北京100094;3.西北工业大学应用数学系,陕西西安710072)
空间的太阳能能量密度比地面高,且不受昼夜、季节、天气等影响[1-2],因而空间太阳能电站自提出以来受到了美国国家航空航天局、美国能源部的高度重视,第一个提出空间太阳能电站的概念:1979 SPS基准系统[3]。随后,世界各国相继提出了集成对称聚光系统[4]、Abacus空间太阳能电站[4]、太阳帆塔[5]、绳系空间太阳能电站[6]、编队飞行空间太阳能电站[7]、多旋转关节空间太阳能电站[8]等概念。对于结构尺寸在千米量级的绳系空间太阳能电站,其动力学与控制是非常具有挑战性的问题。2003年Fujii等[9]将太阳能电池板看作刚体,平台看作质点,忽略绳子的质量和弹性,研究了绳系空间太阳能电站的姿态运动和结构振动的控制算法。Zhou和Fan[10]针对绳系空间太阳能电站的试验模型,将太阳能电池板看作欧拉-伯努利梁,忽略绳子的质量和弹性,研究了系统在轨道平面内的单轴转动,并采用主动姿态调整和主动振动抑制相结合的复合控制方法,实现系统姿态的快速大角度机动。周荻和范继祥[11-12]将太阳能电池板看作板,通过4根绳子跟平台连接,建立了系统的动力学模型,研究了系统单轴大角度机动过程中的姿态控制和通过绳子张力进行结构振动抑制的问题。Fan等[13]和Fujii等[14]将太阳能电池板简化为梁,进一步通过地面实验验证了采用调整绳子张力的方式进行太阳能电池板主动振动控制的可行性。Senda和Goto[15]将绳子看作弹簧,平台和太阳能帆板看作刚体,建立了绳系空间太阳能电站的动力学模型,并设计了采用地磁场进行姿态控制的控制算法。Ishimura和Higuchi[16]将平台看作质点,将绳子看作弹簧,太阳能电池板看作板,研究了热致变形对绳系空间太阳能电站动力学响应的影响。魏乙等[17]采用绝对节点坐标法,建立了绳系空间太阳能电站的动力学模型,研究了轨道高度、绳长以及系统质量对太阳能电池板振动特性的影响。绝对节点坐标法能精确描述变形体的大变形[18],但文献[17]在建立模型时假设系统只在平衡点附近运动,因而忽略了绳子的质量和弹性,从而无法准确给出系统的动力学特性。上述文献中均没有研究系统在太阳光压作用下的动力学特性。
本文在文献[17]的基础上,进一步考虑绳子的弹性变形,研究系统在太阳光压作用下的姿态和结构振动响应。在数值算法方面,本文采用辛Runge-Kutta方法进行求解,从而保证系统长时间数值仿真的稳定性[21-22]。
1 动力学模型
为了便于研究绳系空间太阳能电站的姿态运动和结构振动,只考虑系统在轨道平面内的运动情况,将地球看作匀质球体。如图1所示,将平台看作质点(点P),将太阳能电池板看作Euler-Bernoulli梁(梁AB),将绳子看作弹簧。点C为梁AB的中点。建立惯性坐标系Oxy,其中坐标原点O与地心重合,Ox轴与Oy轴在轨道平面内。系统的参数和绳系空间太阳能电站的设计参数,与文献[6,16]中的数据一致。

图1 简化模型

r(xe)=[x(xe),y(xe)]T=S(xe)ei
(1)
式中,xe∈[0,le]为梁单元内的局部坐标,ei为第i个梁单元的节点坐标,S(xe)为形函数在xe点处的取值,其具体形式可参考文献[18]。系统的总动能可以表示为
(2)
式中,[xP,yP]T为质点的绝对坐标,M是对称的系统质量矩阵,。由于本文考虑的是Euler-Bernoulli梁,第i个梁单元的弹性势能可以表示为[18]
(3)
式中,ul和ut分别为梁的轴向变形和横向变形,Ui,elast具体表达式见文献[18]。第i个梁单元的万有引力势能为[17]
(4)
由于系统的动能是广义速度(广义坐标对时间的导数)的二次型,在这种情况下,系统的Hamilton函数可表示为[19]
(5)
引入广义动量
(6)
系统的动力学方程为[20]
(7)
方程(7)是一阶常微分方程组,可直接采用经典四级四阶Runge-Kutta方法或者二级四阶辛Runge-Kutta方法[21,23]进行数值求解。
2 太阳光压摄动
绳系空间太阳能电站在轨道上运行时,会受到多种空间摄动的影响,本文研究太阳光压摄动引起的姿态和结构振动动力学响应。太阳光压在一个平面上产生的作用力为[24]
(8)
式中,PSRP=4.5×10-6N/m2为地球附近的太阳光压常数,A为该平面的受照面积,n为指向平面里面的法向量,usolar为太阳光的方向,ρa,ρs和ρd分别为平面的吸收率、镜面反射率和漫反射率,且有ρa+ρs+ρd=1。
通过公式(8)计算得到一个平面的太阳光压力,但对于绳系空间太阳能电站的简化模型,太阳光压力应为分布力。将梁单元看作是一个平面,从而可以计算梁单元的太阳光压力,再将梁单元所受的太阳光压力看作是均匀分布力,从而可以通过虚功原理得到相应的广义力表达式[25]
(9)
3 有效性验证
为了研究梁的振动情况,建立如图2所示的连体坐标系Pξζ,ζ方向为CP方向。在后文的算例以及数值仿真分析中,δ表示梁AB在ζ方向的位移,即δ=ζ-lPC。

图2 局部坐标系的定义
为了验证本文模型的正确性,将本文的模型参数改为与文献[17]一致。文献[17]中将绳子简化为等距约束,即绳子的弹性系数认为是无限大;本文的模型中绳子弹性系数设置成非常大的数,从而使绳子的变形量很小。图3是梁中点的挠度随时间变化的曲线,本文的结果与文献[17]中图11a)所示的结果相符,验证了本文动力学模型与数值算法的正确性。

图3 梁中点挠度
图4展示了采用辛Runge-Kutta方法进行数值仿真时的弹簧变形情况,该方法计算的弹簧变形量保持在一定的范围内振动,符合本文模型没有阻尼的情况;而且可以看出辛Runge-Kutta方法的数值仿真结果能保持原系统的固有特性,而Runge-Kutta方法由于存在算法的耗散,导致仿真结果出现与系统固有特性相比产生偏差。因此,本文采用辛Runge-Kutta方法进行数值仿真。
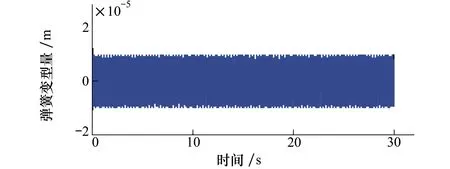
图4 辛Runge-Kutta方法计算的弹簧变形量
4 数值仿真分析
本小节分析绳系空间太阳能电站的动力学特性,除特殊说明外,系统的参数均为文献[6,16]中所示的值。初始时刻,绳系空间太阳能电站在地球静止轨道运行,PC指向地面,梁处于未变形状态,绳子长度处于原始长度状态。
4.1 收敛性分析
分别将模型取不同数目的单元,研究梁的振动随时间变化曲线。
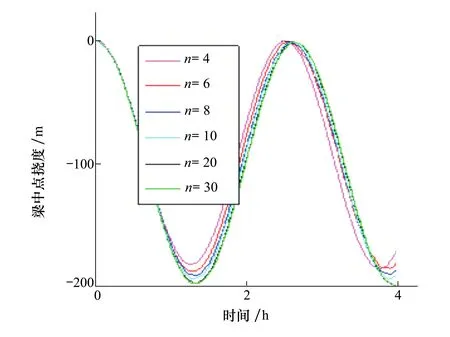
图5 梁中点的变形随时间变化曲线
通过图5可知,随着单元数目的增加,梁的刚度有小幅度减小,当单元数目到达20时,可以认为梁的动力学响应基本收敛了。所以在后续的动力学分析中,梁单元数目均为20。
4.2 系统姿态的动力学响应
为了研究太阳光压对系统姿态的影响,将图6中的α定义为系统的姿态。由于太阳光压的压力中心与系统的质心不重合,所以太阳光压力会产生一个太阳光压力矩,对系统的姿态产生影响。为了研究不同振幅的系统振动下太阳光压对姿态的影响,本文考虑4种情形,分别对应于不同的梁抗弯刚度和是否考虑太阳光压,仿真结果如图7和图8所示。情形一和情形二的截面二次矩取为设计值,而情形三和情形四的截面二次矩取为设计值的10倍。

图6 系统姿态角的定度(点M为系统的质心)

图7 4种情形下的系统姿态角

图8 不同情形下的系统姿态角之差
根据仿真结果可知,结构振动和太阳光压都对系统的姿态产生较大的影响。从情形一的姿态响应曲线中可看出,在一天时间内,梁的振动使系统的姿态产生了振幅约为0.01 rad的振动。从情形二中可以看出,太阳光压对系统的姿态响应造成了明显影响。对比情形三和情形一可知,当梁的截面二次矩增加10倍时,系统的姿态响应幅值相应地减小约10倍。
在以上4种情形中,系统的结构振动都是无法避免的,情形一和情形二的结构振动幅值可达到约200 m。即使在梁抗弯刚度更大的情形三和情形四下,系统的振动幅值也可达到20 m。为了进一步研究在不同的梁抗弯刚度条件下,太阳光压对系统姿态产生的影响,将情形二和情形一的结果作差,情形四和情形三的结果作差,得到的结果可认为是太阳光压单独对系统姿态的影响,如图8所示。根据图8可知,在不同的梁抗弯刚度条件下,太阳光压对系统带来的影响是不同的,这也体现了绳系空间太阳能电站复杂的耦合动力学特性。
4.3 太阳光压对梁振动的影响
梁在重力梯度的作用下会发生振动,同样,梁在太阳光压的作用下也会发生振动。图9展示了情形一和情形二的梁变形情况,图10为图9的局部放大图。根据图9和图10可知,太阳光压对梁振动造成的影响非常小,在太阳光压作用下梁振动的振幅约增加了0.54%,几乎可以忽略不计。
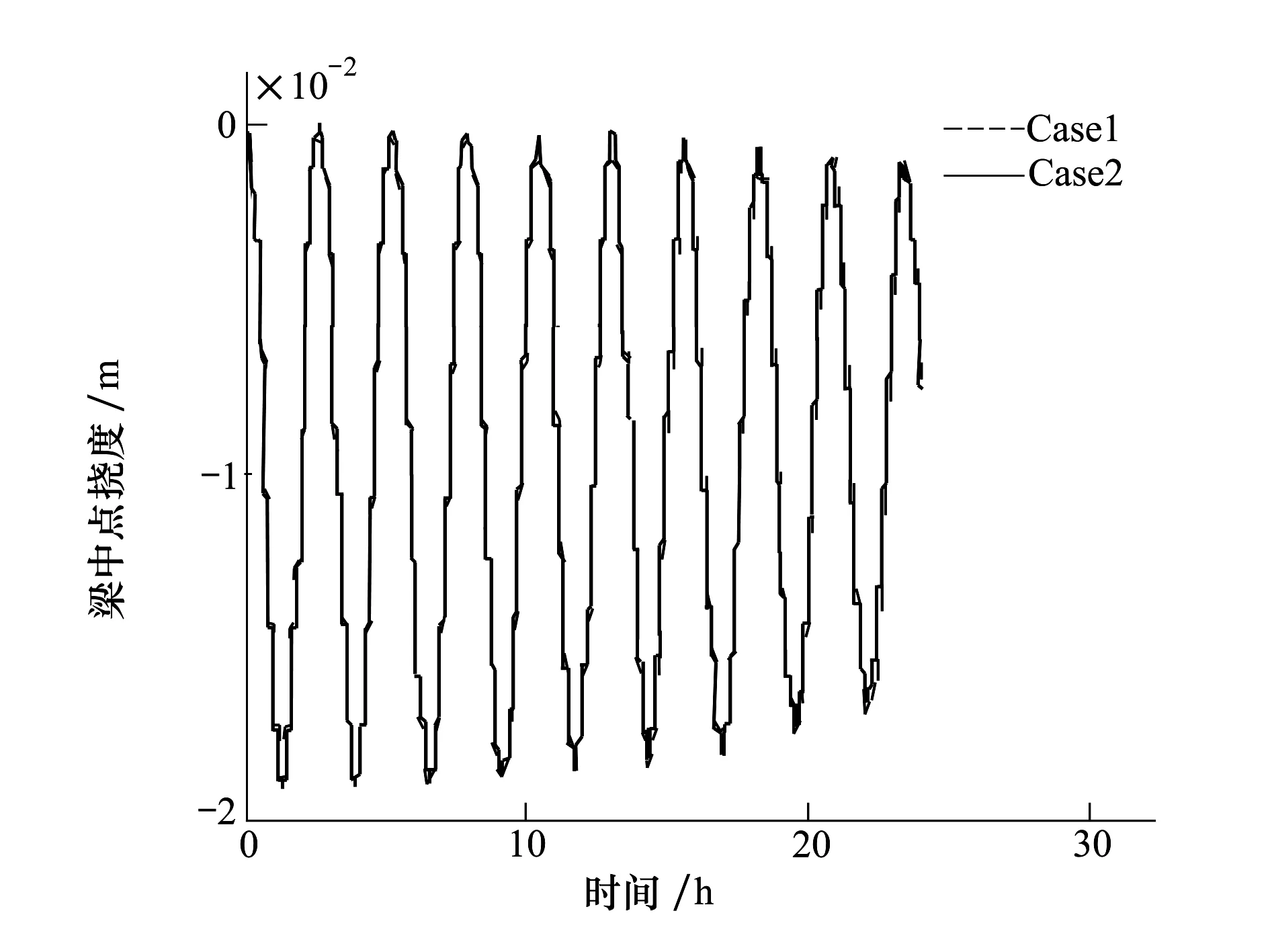
图9 梁中点的变形
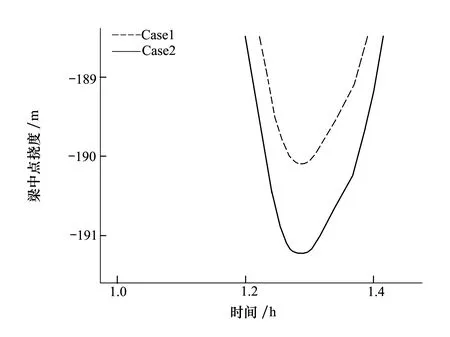
图10 图9的局部放大图
系统的重力梯度约为150 N,在系统姿态角度始终较小的情况下令绳子产生约150 N的拉力。根据公式(8)算出的太阳光压力峰值约为20 N。太阳帆板通过绳子将太阳光压力传达给平台,从而使整个系统产生一个光压加速度,此时绳子上产生的拉力约为太阳光压力的1/20(因为平台质量占系统总质量的1/20)。通过上述分析可知,太阳光压力使绳子产生峰值约1 N的拉力,而重力梯度使绳子产生约150 N的拉力,此比值与太阳光压使梁振动产生的额外振幅比值相一致。
5 结 论
本文采用绝对节点坐标法建立了绳系空间太阳能电站的动力学模型,研究了太阳光压对系统姿态和系统结构振动的影响。研究结果表明,跟传统的Runge-Kutta方法相比,辛Runge-Kutta方法在数值仿真中能保持系统的振动特性,更好地反映Hamilton动力学系统的本质动力学特性。太阳光压和结构振动均会造成系统姿态产生幅值为0.01 rad左右的振荡。结构振动的幅值减小10倍时,结构振动引起的姿态振荡幅值相应地减小10倍左右。在不同的结构刚度情况下,太阳光压对系统姿态造成的影响略有不同。太阳光压对结构振动的影响几乎可以忽略不计,一方面是由于太阳光压力的峰值比重力梯度力小得多,另一方面是由于绳系空间太阳能电站平台的质量比太阳能电池板的质量小得多。
