无人机倾斜摄影测量在三维建模中的应用
2018-07-13艾嘉豪朱大明
艾嘉豪,朱大明
(昆明理工大学 国土资源工程学院,云南 昆明 650000)
0 引言
当前,将无人机技术与微型倾斜摄影技术有效结合进行低空无人机倾斜摄影测量已经成为新兴的研究热点[1-5]。庄晓明[6]等人提出使用无人机搭载照相机,使用遥控飞行器对实地进行不同角度的影像高效迅速地数据采集,进行三维模型的建立,真实地反映地面的客观情况。倾斜摄影技术所建立的三维模型可真实反映地物的外观、坐标、高程等信息;借助无人机,可迅速采集影像数据,实现全自动化三维建模[7]。研究使用无人机对三维模型建模及其建模质量效果在如今数字城市与智慧城市应用以及三维测绘领域中有着重要意义。
1 无人机数据采集
1.1 测区概况
摄区属于高原断陷湖泊,湖面海拔1720米,三面环山,一面接着澄江坝子。湖面北部宽阔而深,南面狭小而浅,中部细长,形似葫芦。湖泊径流区年平均气温大约15.6℃,极端最高气温达33.7℃,最低气温–4.4℃,平均降水量942.8 mm,无霜期310多天。抚仙湖四周耕地1.47万公顷。
1.2 主要作业设备
倾斜摄影测量数据的采集主要是无人机所搭载的影像采集系统以及低空航测无人机平台。本次项目所采用的是DM-150型无人机飞行平台2架,相机采用北京数维翔图的3镜头倾斜相机。主要参数如下:

表1 DM-150型无人机参数Tab.1 The parameters of DM-150 type UAV

表2 3镜头倾斜相机参数Tab.2 The paremeters of three tilted camera lenses
利用武汉际上导航AGS200高精度GNSS接收机,通过厘米级动态查分技术辅助空中三角测量,可以大量减少后期地面相控点数量,得以提高工作效率。
1.3 无人机低空遥感的特点
无人机倾斜摄影目前是国内外研究的热点,因为它自身的优势,得到了市场的认可,倾斜影像构建的三维模型已广泛应用于城市规划、公共安全、通信、军事等众多领域[8]。无人机低空遥感与航空摄影测量相比,有比较明显的优势[9-11]:(1)影像获取快捷方便;(2)低成本,效率高;(3)具有机动性、灵活性和安全性;(4)分辨率高、多角度(视角);(5)影像获取时效性强;(6)对气候要求不高。
除上述优点以外,还存在不足[10-11]:(1)姿态稳定性差、旋偏角大;(2)像幅小、数量多、基高比小;(3)非专业量测型相机,影像畸变大;(4)续航时间短。
1.4 航线规划
航线的规划在数据采集之前是一个非常关键的步骤,他可以很好的保证数据获取质量。无人机的影响数据采集和普通的拍照工作大不一样,普通的拍照工作可以人工控制无人机对目标进行随意无规律的拍照,而在无人机倾斜摄影测量的工作中,和普通拍照工作大不一样,飞机的飞行要保证一定的平稳性,并且要根据实际情况规划路线,并且在此航线中无人机的航高要在一定的允许范围内。对于无人机来说,如果需要其飞行具有一定规则的航空路线,在不借助航线规划的前提下,单靠人工通过遥控控制无人机得以操作飞行方向是不容易实现的,除此之外,数据采集的过程中还要保证飞行速度保持匀速,以便影像采样率均匀且影像稳定,再则,在空中作业过程中,会受到空气流速度的影响,使无人机平衡性被打破,导致得到的影响数据模糊,最后,根据相应的规范要求,建模对于像片的采样率和重叠率有比较高的要求,光靠人工操作遥控器飞行不好把握的,最后导致飞行获取数据的质量不高,从而致使需要重飞等操作,降低工作效率,所以,可见因此航线规划在进行数据采集前是很有必要的。一般而言,理想的测区形状为矩形,也就是传统航空摄影中所使用的测区形状。矩形测区的航线规划较为简单,采用平行航线折返拍摄即可。但实际情况中,测区的形状很可能是非规则的多边形甚至是长条带形状,这会增加航线规划和执行的难度[12]。
航摄相对航高按下式计算:

式中:H——摄影相对高度,单位为米(m);
f——镜头焦距,单位为毫米(mm);
a——像元尺寸,单位为毫米(mm);
GSD——地面分辨率,单位为米(m)。
测区所采用像元尺寸为0.00641mm,地面分辨率为0.1m,镜头焦距计划选择35mm,故可以计算得相对航高为550m
航向摄影基线按下式计算式中:

Bx——实地上摄影基线长度,单位为米(m);
Lx——像幅长度,单位为毫米(mm);
Px——像片航向重叠度,以百分比便是
m= H/ f——摄影比例尺分母
根据实地情况,部分航线如图1所示。
2 无人机数据处理
2.1 空中三角测量控制点加密
光线束法区域网空中三角测量,以投影中心点、像点和相应的地面店三点共线为条件,以单张像片为解算单元,借助像片之间的公共点和野外控制点,把各张像片的光束连城一个区域进行整体平差,结算处加密点坐标。由每个像点的坐标观测值可以列出两个相应的误差方程,按照最小二乘法平差,求出每张像片外方位元素的6个待定参数,从而得出各个加密点的坐标。

图1 航线规划示例图Fig.1 Example diagram of route planning
2.2 DSM生成
由于低空飞行较常规的影像的几何变形较大,首先在匹配前需要对原始影像进行几何粗改正处理,包含姿态角改正和比例尺改正;其次建立改正后影像的影像金字塔,并利用Harris算子逐级提取特征点,为密集匹配过程做准备,但我们在此过程中,应保证特征点分布均匀。密集匹配处理过程中应用金字塔匹配,多视匹配、边缘特征匹配等匹配策略,快速、高可靠性地匹配密集的DSM点云。最后DSM点云数据进行粗差剔除,三维点云的保证特征滤波处理、影像纹理的地理识别与分类等处理。
2.3 三维模型的建立与精度分析
2.3.1模型的建立

图2 模型成果图Fig.2 The diagram of model results
本次模型建立使用的是Bentley ContextCapture软件进行三维建模。ContextCapture对于应用真实背景三维模型以助力基础设施设计、施工或运营的组织而言,此款软件的建模效果是比较理想的。借助ContextCapture,用户可利用数码相机所拍摄的照片,为当前环境轻松生成高分辨率的三维模型。此模型具有逼真的精美细节、清晰的边缘以及精确的几何特性。用户可以按照自己的需求,以所需求的尺寸或分辨率创建模型。
2.3.2精度分析
利用Bentley ContextCapture软件对像控点进行空三加密,加密部分结果如下:

表3 部分片区成果统计Tab.3 Part of the results statistics
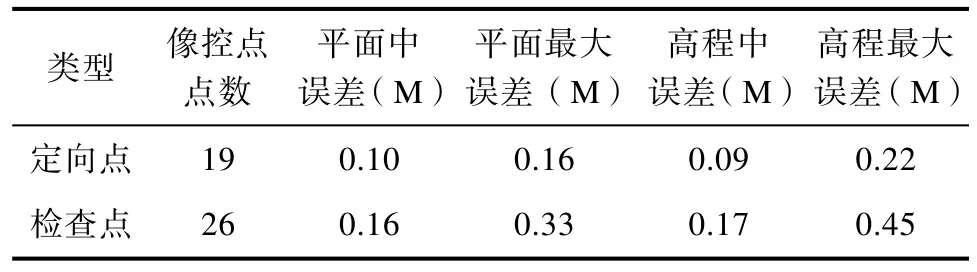
表4 部分成果统计表Tab.4 Part of the results statistics
由上精度可以看出,基本定向点残差、检查点误差结果精度完全满足 CH/Z3003-2010《低空数字航空摄影内业规范》要求。通过模型定向点与检查点的误差情况来看,二者确实存在一定的差距,模型平面精度最大不超过 0.5 m,而高程精度最大0.65 m。这个精度要达到高精度测绘级别成果需求还有一定距离;从模型尺度精度质量表中数据看,模型对于实体对象的几何尺度描述相对还是比较精确的,符合一般的日常实体量测需求。
3 结论
在飞行与建模过程中,出现像片受侧风影响,姿态不够理想,部分航飞质量不高,少量影像存在偏色和影像模糊的现象,倾斜三维模型有少量的扭曲变形等问题,但是经过重飞,色彩规划处理等操作,以保证最后成果精度。利用无人机倾斜摄影测量三维模型制作,不仅可以得到真实地物地貌的外观,平面位置以及高程信息等属性,大大提高了真实感,还具有低成本和高效性的的特点,通过精度分析可以得到,建立模型的精度大范围可以达到亚米级,虽然不能达到高精度三维模型的建立,但是可以满足日一些小比例尺生产需求。
