基于NC运动控制技术的车身伺服定位器的设计
2018-07-11何广邦蒋志经
何广邦,葛 腾,蒋志经
(上汽通用五菱汽车股份有限公司,广西 柳州545007)
0 引言
当前,汽车型号更新速度不断加快,以前每年推出1~2款新车,到现在每年推出5~6款新车,这就需要采用柔性化焊装生产线才能够兼容不同车型的共线混线生产。
目前国内车身柔性焊装线大多采用GEO-Pallet高速输送系统,其优点是输送速度快、定位精度高,缺点是造价比较高、切换精定位随行夹具时间较长、占地过大。
伺服定位器是根据白车身焊接线柔性化生产需求开发的使用伺服控制技术的车身定位装置。为了克服GEO-Pallet高速输送系统的上述缺点,设计了伺服定位器加往复杆的输送定位方式。新型的输送定位方式可以显著降低成本,并且设备简单占地小,车型定位切换在输送过程中即可完成,减少非增值时间。伺服定位器基于车身柔性焊装线,选用了OMRON公司最新款运动控制器NJ系列,可以根据不同车型的定位位置进行示教编程,构造能适应多种车型的柔性焊装线。机械本体则采用模块化的直线滑动机构,结构简单易于现场安装维护,并具有高刚性、高精度、高速、小型等优点。
伺服定位器的设计包括了机械本地的设计以及电气控制系统的选型设计,下文逐一详述。
1 NC伺服定位器的机械结构和工作方式
1.1 机械结构
根据我公司现有车型的车身定位需求,设计的NC定位器如图1所示。

图1 伺服定位器机械结构
如图1所示,其机械主体由三个直线滑动单元组成,均由伺服电机驱动。X轴(X为车身线运动方向)与Y轴完成车身的定位,Z轴用于车身的举升与脱销。由于为模块化标准件组装,其构造简单、空间占用小,十分利于构建车身高效柔性生产线。而且X轴与Y轴的构造通用化,降低了备品备件的储存量。
1.2 定位与搬运
根据现有车型的定位需求,不同工位需NC定位器的数量有不同。现以总拼工位分析,每个工位需要4个NC定位器进行定位于支撑。其工作方式为:
(1)输送线输送到位,各NC定位器XY平面移动至当前车型的设点位置;
(2)各NC定位器Z轴同步升起,定位销进入车身定位孔并举升车身,使车身脱离往复输送,升至焊接高度位置;
(3)往复杆后退到位,车身进行焊接;
(4)焊接完成后,各NC定位器Z轴同步下降,车身与输送线接触并与NC定位器脱离,完成交接;
(5)输送线前进到位,完成一次输送循环。
定位和搬运如图2所示。

图2 伺服定位器的定位和搬运示意图
2 NC伺服定位器的运动控制
2.1 伺服系统
伺服系统是指实现输出量变化精确跟随或复现输入变量的控制系统。其由伺服电动机、功率驱动器、控制器、传感器四大部分组成,具有定位精度高、高速定位、抗干扰能力强、启动转矩大、响应快等优点。车身工装定位精度要求±0.2 mm,伺服系统完全满足定位要求。
根据定位器的设计需求,采用半闭环系统,电机采用0.75 kW的交流伺服电机,编码器采用绝对值编码器。半闭环控制原理如图3所示。

图3 伺服系统半闭环控制原理
2.2 系统的选型、配置和设计
欧姆龙NJ系列运动控制器包含以往的可编程控制器的功能,并附加了运动控制所需的各种功能,可在高速EtherCAT上同步控制视觉装置、运动设备、I/O等的输入输出设备[1]。
欧姆龙NJ系列运动控制器包括可以控制4轴,8轴,16轴,32轴,64轴以及256轴等各种型号。对于各型号,其可以同时进行插补控制的数量也不一样。
NJ运动控制器采用带有RJ45连接器的标准STP Ethernet电缆。在机械自动化领域,EtherCAT是当仁不让最快的新型网络,它基于Ethernet,可快速、准确并高效地传输数据。EtherCAT可以对伺服驱动器、变频器、视觉系统和I/O进行实时控制[2]。
基于对本工位的设计,系统选用了OMRON公司最新的1S系列伺服驱动器和对应的伺服电机,为了防止停电或者故障发生后各轴可能出现位置偏移,所有电机选用了带制动器的伺服电机。
设计中,根据实际的轴组组合,相关的X/Y/Z轴在硬件设计中组合成一个轴组,故障报警串联起来输入到NJ控制器中作为轴组的故障信号,此信号可以在轴组的任何一个轴出现故障时候,可以快速切断本轴组的主电源,停止各轴的运动。
在NJ的软件Sysmac Studio中,首先需要对系统的硬件进行配置,对组成轴组的各轴一一进行设置:通过自动扫描,可以把连接到EtherCAT网络的所有设备(主要是伺服驱动器和IO站点等)扫描上来;在各个驱动器站点中,可以对驱动器参数进行设置,如电机旋转方向,惯量比,驱动器外部IO的配置等等。部分驱动器的参数设置见表1所示。

表4 驱动器参数设置
此外,在运动控制设置中,还需要对各轴进行详细的设置,包括编码器分辨率,本轴的最大移动速度,最大点动速度,最大加速度,软件限位,电机旋转一周的行程等等参数。
在轴组设置中,对应于先前的硬件轴组组合,将相关的X/Y/Z各轴组合成一个轴组,同时还有对轴组的最大插补速度,插补最大加速度等进行设置。轴组参数设置见图4.
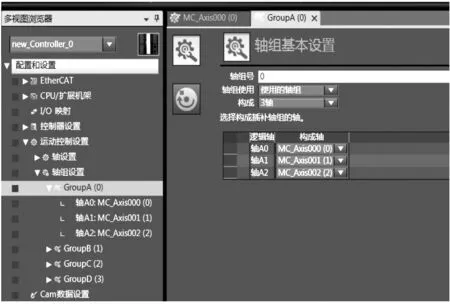
图4 轴组参数设置
2.3 控制系统的设计
NJ运动控制器支持最新的PLC编程标准IEC61131-3,其运动控制指令和国际上其他公司的相互兼容。Sysmac Studio支持梯形图编程和结构化编程,即ST语言编程。同时,在梯形图中,可以嵌入结构化的编程。这使得编程更加灵活方便:一般的逻辑控制可以使用梯形图进行编写,对变量赋值、复杂的数值运算或逻辑运算可以用ST语言编写,整体程序更加简单易读。ST语言和梯形图的混合编程见图5.

图5 ST语言和梯形图的混合编程
在程序的设计阶段,根据先前的设置,系统已经生成了一部分的系统变量,包括轴变量和轴组变量。NJ的编程跟欧姆龙公司之前的CJ或者其他系列PLC不同,NJ完全使用了标签编程,不必考虑变量在系统中的实际位置,变量的命名更加个性化;同时,NJ支持多维数组以及结构体、联合体、枚举数据类型等,编程的自由度进一步得到释放。
2.4 触摸屏程序的设计
欧姆龙的NS系列触摸屏和NJ控制器可以进行标签链接。从NJ的程序中可以把触摸屏需要使用的变量(必须是全局变量)导出,然后在触摸屏的编辑软件重新导入即可使用,不必担心数据类型长度会造成混淆。
此外,触摸屏的编程也要充分考虑操作习惯。关于触摸屏的编程不在此一一赘述。
3 结束语
本文分析了NC定位器的结构,功能,整合了最新的NJ运动控制器,伺服驱动器以及伺服电机,结合实际应用,应用IEC61131-3标准的运动控制指令,实现了基于NC控制的高速定位器。据此设计的NC伺服定位器系统已经成功应用在公司的3条生产线上,取得了良好的效果。NC伺服定位器结构简单,定位迅速精准,系统构成简单,整个系统成本相对于目前市面上已有的一体化的基于数控系统的NC定位器,成本优势明显,同时还可以实现复杂的逻辑控制。可以构造适应对应多种车型的生产线。
