地铁曲线站台空隙异物自动检测预警系统研究
2018-07-10谭飞刚
谭飞刚,翟 聪
(1. 深圳信息职业技术学院 交通与环境学院,深圳 518172;2. 华南理工大学 土木与交通学院,广州 510641)
随着我国城市轨道交通的快速发展,越来越多的城市开通了城市轨道交通[1]。日益复杂的线路网可有效缓解上下班高峰或节假日人们出行压力,但是大客流也给城市轨道交通运营安全管理带来了巨大的挑战。目前,为了防止乘客在候车过程中出现被挤下站台等威胁乘客安全的事故发生,我国大部分地铁车站在站台轨行区和候车区之间安装了屏蔽门,从而将轨行区和候车区进行有效分离[2]。
由于站台屏蔽门与列车车门之间存在至少10 cm的空隙[3],如果在列车离站时,该空隙中存在异物会导致严重的运营事故。直线型站台可以通过司机瞭望车门与屏蔽门间空隙实现列车出站前的异物检查,从而减少或避免车门与屏蔽门间空隙夹人夹物的事故发生。但是,车站在建设过程中会受地形等因素的影响而建成曲线型地铁站台。在这种曲线型站台上列车司机无法直接看到整个车门与屏蔽门间空隙。此时,一般的做法都是通过多名站务员协同配合来完成出站前空隙异物检测。这种人工方式易受到视力、精神状态等主观因素干扰,并且成本高。因此,如何利用现有的科学技术辅助地铁车站安全运营管理已成为当前研究的热点问题[4]。
目前,站台屏蔽门与列车车门之间空隙异物自动检测方法根据原理可归纳为基于激光探测的方法、基于红外光幕探测的方法和基于机器视觉的方法3种。谭飞刚等人[2]对3种方法的优缺点进行了分析并阐述了基于机器视觉的方法所具有的优势。机器视觉技术就是通过摄像机与计算机的结合来实现计算机对外界事务的检测与识别功能。它在许多实际生活场景中得到了广泛应用,如行人检测、客流估计、跨摄像机行人再识别等[5-6]。黄文华等人[3]针对曲线型地铁站台提出了一种基于颜色特征完整性检测的地铁车门与屏蔽门间空隙异物自动检测算法。
通过调查发现,车门与屏蔽门之间空隙产生夹人夹物现象主要集中在车门和屏蔽门的闭合处[7-8]。黄文华等人[3]通过在屏蔽门下方踏板处安装有色灯带,并通过其上方摄像机拍摄和检测有色灯带而形成的彩色光幕的完整性来间接判断空隙中是否存在异物。该方法具有安装方便、易于辨别等优点,但是其也存在易受外界光照变化以及所夹异物颜色影响等缺点。为了弥补该方法的不足,本文提出了一种基于车门位置定位的曲线站台空隙异物检测系统。
1 系统概述
系统对地铁车门与屏蔽门间空隙异物自动检测处理流程如图1所示。列车进站后对车门位置进行检测与定位,准确定位车门位置后对该区域进行扩展,所得区域即为车门的感兴趣区域。当乘客上下车完成,屏蔽门与车门再次关闭后,该系统对感兴趣区域进行异物检测。如果存在异物则向司机发出预警信息延缓启动列车,反之,正常启动列车出站。
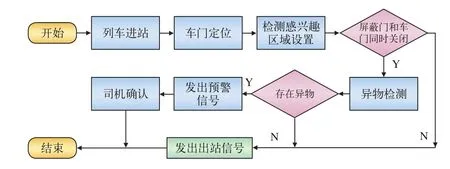
图1 系统处理流程
1.1 车门定位
列车在进站过程中需要对标停车,因进站速度差异导致停车位置存在少许差异,造成列车车门并不是每次都停留在同一位置。为了能够对车门和屏蔽门最易产生夹人夹物的区域进行准确检测,从而提高系统的安全效果。本文所提算法就是在列车进站停车后且未开车门时对车门进行图像采样。然后利用Hough变换原理快速检测出车门在视频画面中的位置。
1.2 感兴趣区域设置
为了提高算法的处理速度和减少其它背景区域的干扰,本系统在车门位置确定后会自动对车门位置按照式(1)进行扩展形成一个更大的区域,即为车门感兴趣区域。
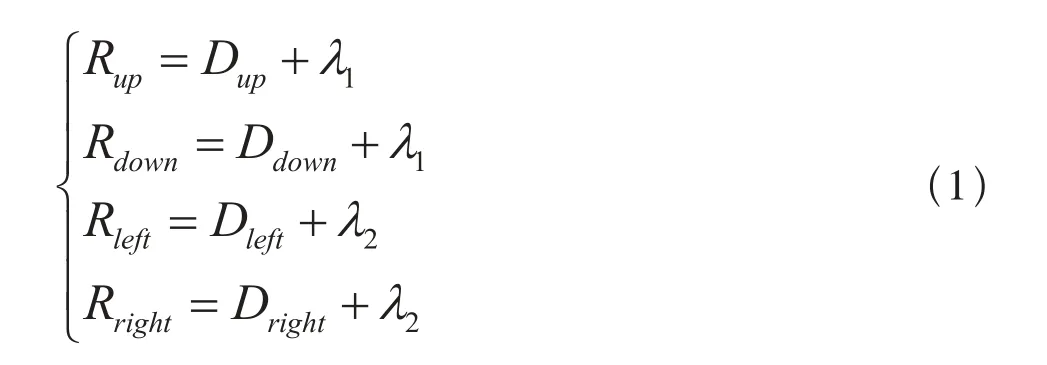
其中, Rup、Rdown、Rleft、Rright表示车门感兴趣区域上下左右的边界, Dup、Ddown、Dleft、Dright表示车门上下左右的边界, λ1、λ2分别表示上下部分和左右部分增加的距离。因为车门在停车过程中上下偏移比较少,而左右偏移会比较多,因此,本文将他们的值分别设置为20像素点和30像素点。
因为屏蔽门固定在站台上,因此,屏蔽门以及屏蔽门与车门间空隙所在感兴趣区域可以通过人工来设置。感兴趣区域一旦设置完成,系统将只提取感兴趣区域内图像传递至后续步骤处理模块。由于每趟列车进站停靠的位置存在些许误差,因此,为了增加算法的鲁棒性,每趟列车进站停车后都会对车门感兴趣区域进行检测。
1.3 异物检测
异物检测过程如下:(1)根据感兴趣区域截取视频流中图像;(2)利用混合高斯模型得到列车停站后车门未开启时的背景图像。当乘客上下车完成且车门再次关闭后,系统将截取到的视频图像与背景图像进行比较(即背景差分法),结合阈值处理得到二值图像。列车停在站台隧道里会受气流和灰尘等影响,因此,采用形态学的开关操作对二值图像进一步处理来减少其它因素的干扰;(3)通过对二值图像的完整性检测实现对车门处异物的检测。
1.4 预警
车门打开乘客上下车时,系统处于不检测状态。待乘客上下车完成,屏蔽门和车门均关闭后,系统会对车门和屏蔽门感兴趣区域进行异物检测。如果检测结果为存在异物,则系统会触发车头方向的声光报警并将拍摄画面传递至车头供列车司机进行查看和确认。从而防止在空隙中存在异物的情况下启动列车而发生运营安全事故。
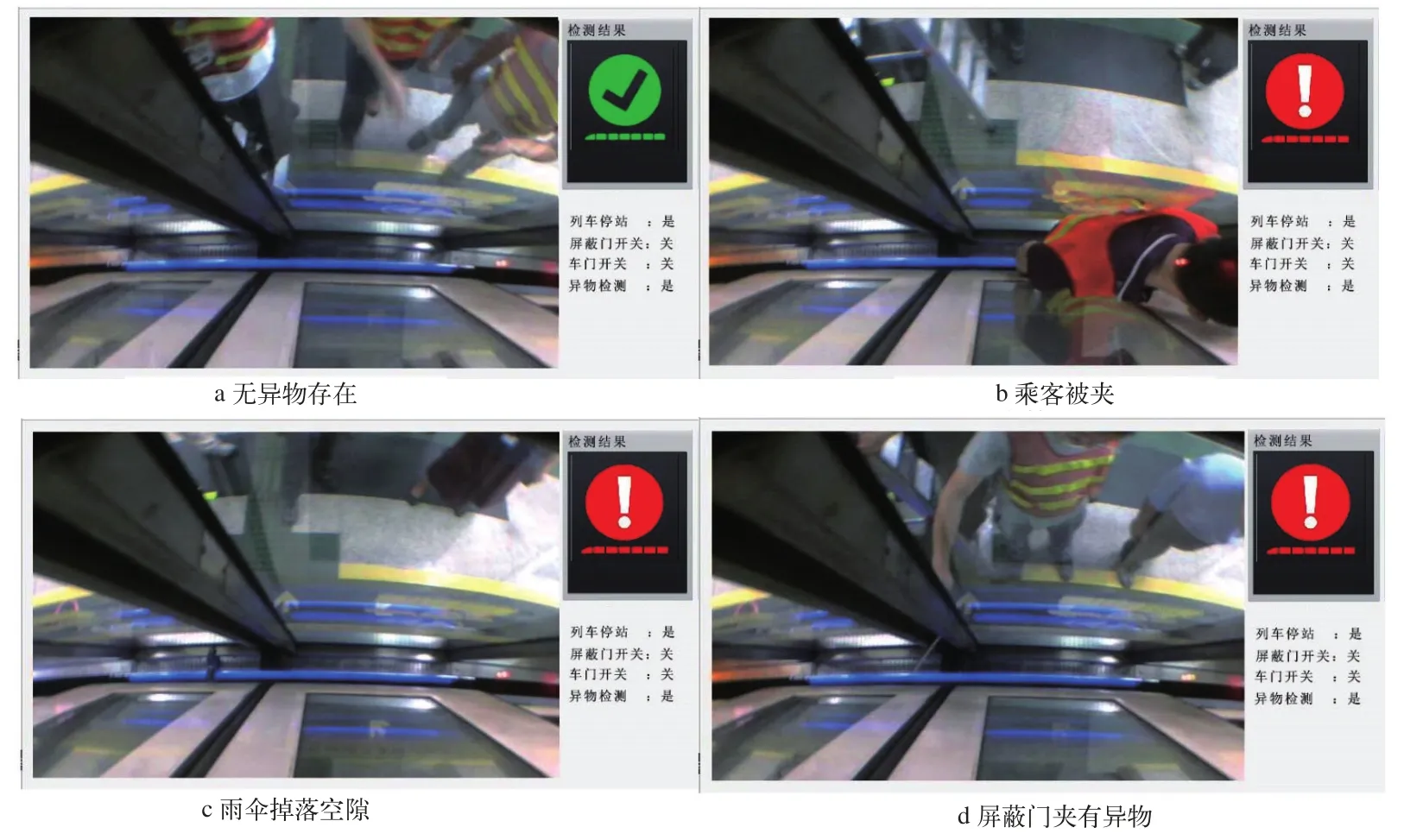
图2 系统部分异物检测效果
2 现场实验
为了检验本文所设计系统进行异物自动检测的准确性,通过在某个地铁曲线站台的屏蔽门上方安装微型摄像机,同时录制现场人工放置伞、塑料瓶等异物进行模拟车门与屏蔽门间夹有异物的视频录像,再将所录视频离线导入本系统进行实验测试。本系统开发所需软件环境:.NET Framework 2.0,opencv 2.4.9,visual studio 2015。操作系统为Windows 7,2 GB内存,摄像机的分辨率为1 920 ×1 080像素。视频长约1 h,包含40处异物。
在对测试视频进行实验检测中,本系统能对每列列车的车门进行准确定位并且对存在异物的视频段都能检测出来,其准确率达到了100%。视频检测过程中的部分实验效果如图2所示。从图中不难看出,本系统可以检测出所有掉落或者夹在车门或屏蔽门上的异物。此外,实验结果也说明了本系统对列车停站位置以及站台光照环境具有较好的鲁棒性。
3 结束语
针对目前城市轨道交通运营过程中在曲线型地铁站台上列车车门与站台屏蔽门之间空隙存在夹人夹物的安全隐患现象,提出了一种基于车门位置定位的曲线站台空隙异物检测系统。通过真实的地铁曲线站台现场录制视频进行实验测试,其结果表明本文所提系统具有很好的检测效果。
[1] 中国城市轨道交通协会. 城市轨道交通2016年度统计和分析报告[R]. 北京:城市轨道交通2016年度统计和分析报告,2017.
[2] 谭飞刚,刘 建. 一种基于计算机视觉的地铁站台异物检测算法[J]. 铁路计算机应用,2017,26(1):67-69.
[3] 黄华文,刘伟铭,李 军,等. 地铁屏蔽门与车门间异物自动检测技术[J]. 铁路计算机应用,2015,24(12):62-65.
[4] 吴卫海,刘伟铭,李海玉,等. 一种新的地铁曲线站台异物检测系统研究[J]. 城市公共交通,2015(9):33-36.
[5] 谭飞刚,黄 玲,翟 聪,等. 一种用于大型交通枢纽的跨摄像机行人再识别算法研究[J]. 铁道学报,2017(1):76-82.
[6] Tan F, Huang L, Zhai C, et al. Specific object re-identification across non-overlapping camera views in traffic accidents[J].Transportation Planning and Technology, 2016,39(8):759-767.
[7] 万 鑫. 浅谈地铁屏蔽门与车门异物的自动检测技术[J]. 华东科技:学术版,2016(4):36-36.
[8] 施 伟,郑兆鹏,班 琪. 基于改进Hough算法的地铁屏蔽门异物检测技术[J]. 城市轨道交通研究,2016,19(11):81-84.
