比幅单脉冲测角波束指向偏差分析
2018-07-10钱国栋匡华星
朱 灿,钱国栋,张 宁,匡华星
(1. 中国船舶重工集团公司第七二四研究所,南京 211153;2. 海军驻南京地区雷达系统军事代表室,南京 210003 )
0 引 言
多数战术三坐标雷达和超远程相控阵雷达均采用单脉冲测角方法来获得目标的角度信息[1],即通过形成两个天线波束方向图,对它们接收到的回波信号进行幅度或相位比较,再通过内插运算来确定目标偏离中心位置的角度。在被动超视距相控阵雷达中,由于目标辐射源方向及其运动特性未知,通常采用同时多个独立的、主瓣相邻的接收波束进行方位扇区覆盖,以提高辐射源截获概率,缩短截获时间。此时,对于同一个辐射源信号来说,存在一对相邻波束分别输出最强和次强信号,可通过双波束比幅测角的方法进行辐射源方位测向,即通过比较相邻波束输出信号包络幅度的相对大小来确定辐射源的方位。[2]
比幅单脉冲测角误差来源于波束指向偏差和比幅区间内波束方向图畸变导致的波束中心偏移量误差。大多数研究从接收信号的信噪比变化[3]、通道幅相一致性[4-5]等方面展开测角误差理论分析。本文主要从工程实现角度出发,在分析双波束比幅测角原理的同时,对单脉冲比幅测角工程应用中天线波束方向图切割方法和面阵安装精度对测角精度的影响进行了研究。
1 双波束比幅测角原理
相控阵雷达中主要采用3种单脉冲测角方法,分别为幅度比较法、相位比较法和幅度相位比较法。采用相位比较法进行目标测向时,需要解决子阵划分以及子阵相位中心间隔过大引起的相位模糊问题[1]。因此,在平面相控阵雷达中常采用具有测角精度相当但计算复杂度较低的幅度比较法进行目标测向。相比于和差波束比幅测角方法,双波束比幅测角方式更适用于接收信噪比相对较低的被动超视距雷达。[3]
双波束比幅测角算法利用两个部分重叠的相邻波束进行测向[6],当雷达仅在方位维进行相控扫描时,相邻两波束方向图如图1所示。假设波束1方向图函数为F(θ1)且波束中心指向为θ1,波束2方向图函数为F(θ2)且波束中心指向为θ2。
被动超视距相控阵雷达仅在方位上进行扫描。因此,通常使用俯仰宽、方位窄形状的扇形波束,且采用同时多波束覆盖方位扇区的方法提高雷达辐射源截获概率。当目标位于θ0方位时,同时处于波束1与波束2的主瓣之内,通过比较两个波束输出信号的幅度值,可确定目标所在的精确位置,且有
θ0=θ1+Δθ1=θ2-Δθ2
(1)
在工程实践中,为减小运算量通常采取对数相减的方式实现双波束的幅度比较,其输出值K(θ)为目标所在方位θ的函数。
K(θ)=lnF1(θ)-lnF2(θ)
(2)
对于一个实际的相控阵雷达,通常预先将暗室实测校准后各波束方向图计算得到的比值K(θ)存入表中,在检测出有目标后将两波束信号幅度比结果与存储的K(θ)表中相应值进行比较,求出目标所在的位置θ。
从式(1)中可以看出,目标测向误差来源于波束指向偏差和波束中心偏移量偏差两部分。当不存在波束指向偏差时,波束中心偏移量偏差由干扰背景(信杂比)、测角算法以及波束形状曲线测量误差决定,比幅单脉冲测角方法的测角极限误差可近似表示为[1]
(3)
其中,θ3 dB为天线波束的3 dB波宽;Km为单脉冲测角时的误差斜率,与天线方向图形状及天线加权函数有关,根据文献实测值可取Km=1.57或Km=1.6;n为脉冲积累数量;S/N为接收信号的信噪比。当方位角估计算法采用多波束比幅算法时,由波束指向偏差引起的天线方向图曲线偏移会在波束中心偏移量偏差中产生附加误差。因此,在具体工程实践中,通常通过暗室测试校正来减小或消除幅相不一致性、阵元安装位置精度等固定系统误差带来的波束指向偏差。
2 波束指向偏差分析
2.1 波束方向图切割误差分析
前已述及,在实际工程中通常预先存储暗室实测校准后各波束二维方向图,因此需要对全波位的三维方向图进行切割。对于超视距被动探测,通常采用如图2所示的波束方向图进行全波位覆盖。
当面阵垂直于水平面放置时,阵面坐标系与大地坐标系重合,通常采取阵面坐标系下等俯仰切割方法得到各波束的二维方向图。实际工程中,被动相控阵雷达天线面阵经常倾斜放置。因此,需将大地坐标转换为阵面坐标进行方向图的切割。当面阵后倾角度为α时,阵面直角坐标系(xA,yA,zA)和大地直角坐标系(xG,yG,zG)间存在如下转换关系:
(4)
通过直角坐标系与球坐标系转换公式可得阵面坐标系中方位俯仰坐标:
(5)
当面阵后倾10°时,可以得到大地坐标系等俯仰切割和阵面坐标系等俯仰切割两种方法下阵面方位俯仰坐标,如图3所示。
由于阵面坐标系向大地坐标系转换是非线性关系,同时从图2中可以看出边缘波位方向图的俯仰维波脊线并非直线,因此两种切割方法得到的方向图方位波位指向存在偏差(见图4)。在被动超视距雷达中,当阵面存在后倾时应沿大地坐标系下0°俯仰进行阵面坐标转换切割,采用常规的阵面坐标系等俯仰切割会造成波束方位指向偏差,从而影响测角的准确性。
2.2 面阵安装精度误差分析
对于被动超视距雷达,由于仅在方位上进行相位扫描,因此面阵安装精度特别是左右倾斜角度对波位指向也有一定的影响。当固定面阵安装完毕后,基座安装面对水平面的平行度以及后倾的角度由水平仪与铅垂线测得。假设大地直角坐标系OXYZ下矩形ABCD面阵相对垂直面C′D′F′E′后倾为α且相对水平面AB′E′F′向左倾斜β,如图5所示。
由大地直角坐标系旋转两次可得到相应的面阵直角坐标系。首先在OXYZ坐标系中围绕Y轴顺时针旋转α,得到新坐标系C′D′F′E′;然后在坐标系OX′Y′Z′中围绕X′的逆时针旋转γ,得到新坐标系OX″Y″Z″,如 图6所示。此时,面阵在OXYZ平面中后倾α同时向左倾斜β,且有
(6)
此时大地直角坐标系与阵面直角坐标系转换关系为
(7)
当面阵后倾10°且向左倾斜0.5°时,采用大地坐标系0°等俯仰切割后,相应的阵面坐标系下方位俯仰坐标如图7所示。从图中可以看出,在大扫描角处,面阵左右倾斜对阵面方位俯仰坐标影响很大,会导致波束指向偏差,使测角系统误差增大。因此,在面阵安装时,需对安装精度提出合理要求。
3 仿真分析
为对比被动超视距雷达比幅测角中不同方向图切割方法以及面阵安装精度对测角精度的影响,进行了相应的仿真与实践验证。假设面阵规模为4行×64列,阵元间距为d=λ/2,面阵后倾10°,单面阵全波位覆盖90°方位。图8和表1对比了采用不同切割方法后的方向图及测角误差。除前述的按阵面坐标系下等俯仰切割以及大地坐标系0°等俯仰切割方法外,还对比了阵面坐标系下对各波位分别按照各自俯仰指向切割的处理结果。
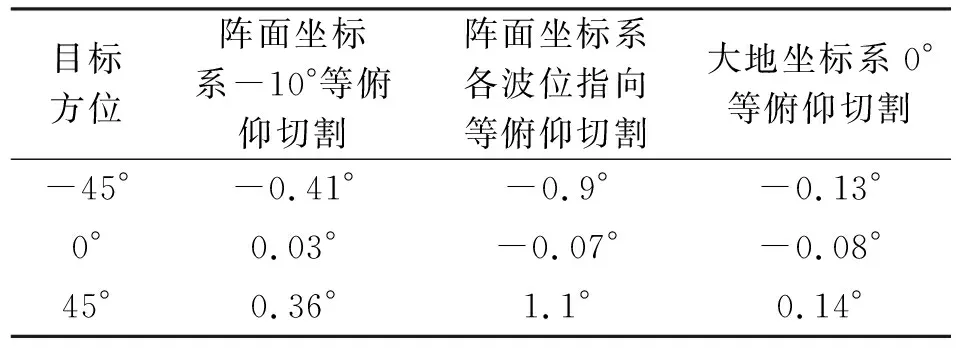
目标方位阵面坐标系-10°等俯仰切割阵面坐标系各波位指向等俯仰切割大地坐标系0°等俯仰切割-45°-0.41°-0.9°-0.13°0°0.03°-0.07°-0.08°45°0.36°1.1°0.14°
可以看出,大扫描角下,在阵面坐标系下俯仰不变的切割结果。与大地坐标系0°等俯仰切割相比,波束指向偏差会达到0.3°左右,而阵面坐标系各波位俯仰指向切割方法的波束指向偏差会达到0.8°。
面阵后倾10°,且不同安装精度下波位指向偏差如图9和表2所示。可以看出,随着面阵安装精度变差,波位指向偏差逐步增大,测角误差也随之增大。因此,为保证测角精度,在面阵安装过程中,应使面阵安装完成后波位指向偏差不超过测角精度指标的10%。
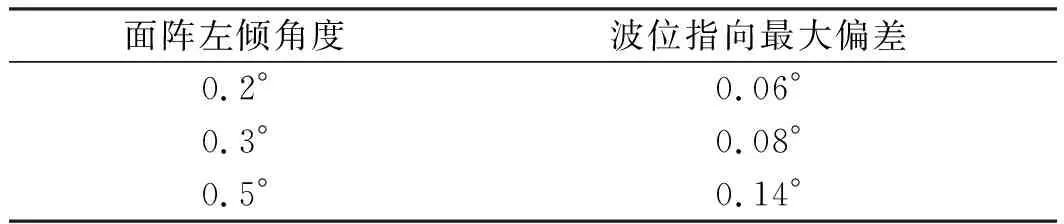
面阵左倾角度波位指向最大偏差0.2°0.06°0.3°0.08°0.5°0.14°
4 结束语
本文首先分析了被动超视距相控阵雷达中双波束比幅测角原理及测角误差来源,然后详细分析了不同方向图切割方法及面阵安装精度对波束指向偏差和测角精度的影响,从而提出了被动超视距雷达比幅测角下方向图切割方法和面阵安装精度准则。通过理论仿真与工程实践验证了该方法的可行性,为被动超视距相控阵雷达的工程实现提供了有力支撑。