法拉利悬架系统结构原理与维修(五)
2018-07-07浙江宁振华
浙江/宁振华
四、Magnaride系统
1.阻尼控制系统(SCM)
半主动型系统(反应–适应)。对通过来自读取车轮和车身运动的传感器的信号输入获得的路面和驾驶条件进行实时响应。每个悬架上的阻尼由磁变流体控制,通过磁场感应的方式改变其密度,作用在悬架上。
2.磁流变的概念
磁流变流体(MR)是一种悬浮着直径几微米的铁磁微粒的油液。在油液上作用电感磁场可以改变其黏度,如图47、图48所示。

┃ 图47 磁流变流体1
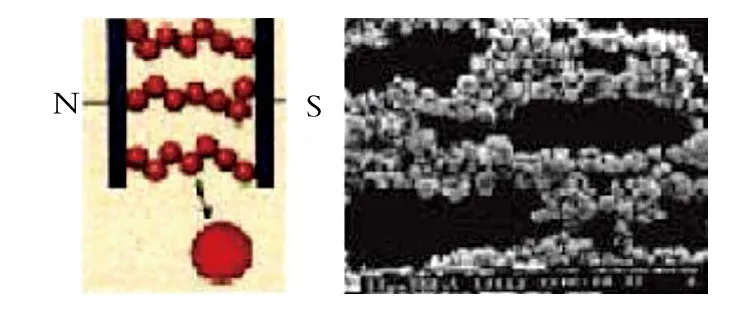
┃ 图48 磁流变流体2
这使得我们可以创建虚拟阀,通过改变作用在管道内流动的磁流变流体上的磁场,可以实时调节其压力流速比特性,无须使用活动的机械零件或外部驱动器,如图49所示。
◆更高的控制频率和更快的系统响应时间
◆在每种路况中提高效率,这由优异的汽车运动控制保证,使得车身在任何和所有条件下都紧贴路面
◆增强换挡舒适性,这是由于减小了路面和冲击带来的干扰和震动
垂直车轮加速度如图50所示。
3.悬架示意图
悬架示意图如图51所示。
4.Delphi电控单元
微混合技术开发的电控单元,C-CAN线路上的诊断,首次应用于法拉利汽车,如图52所示。
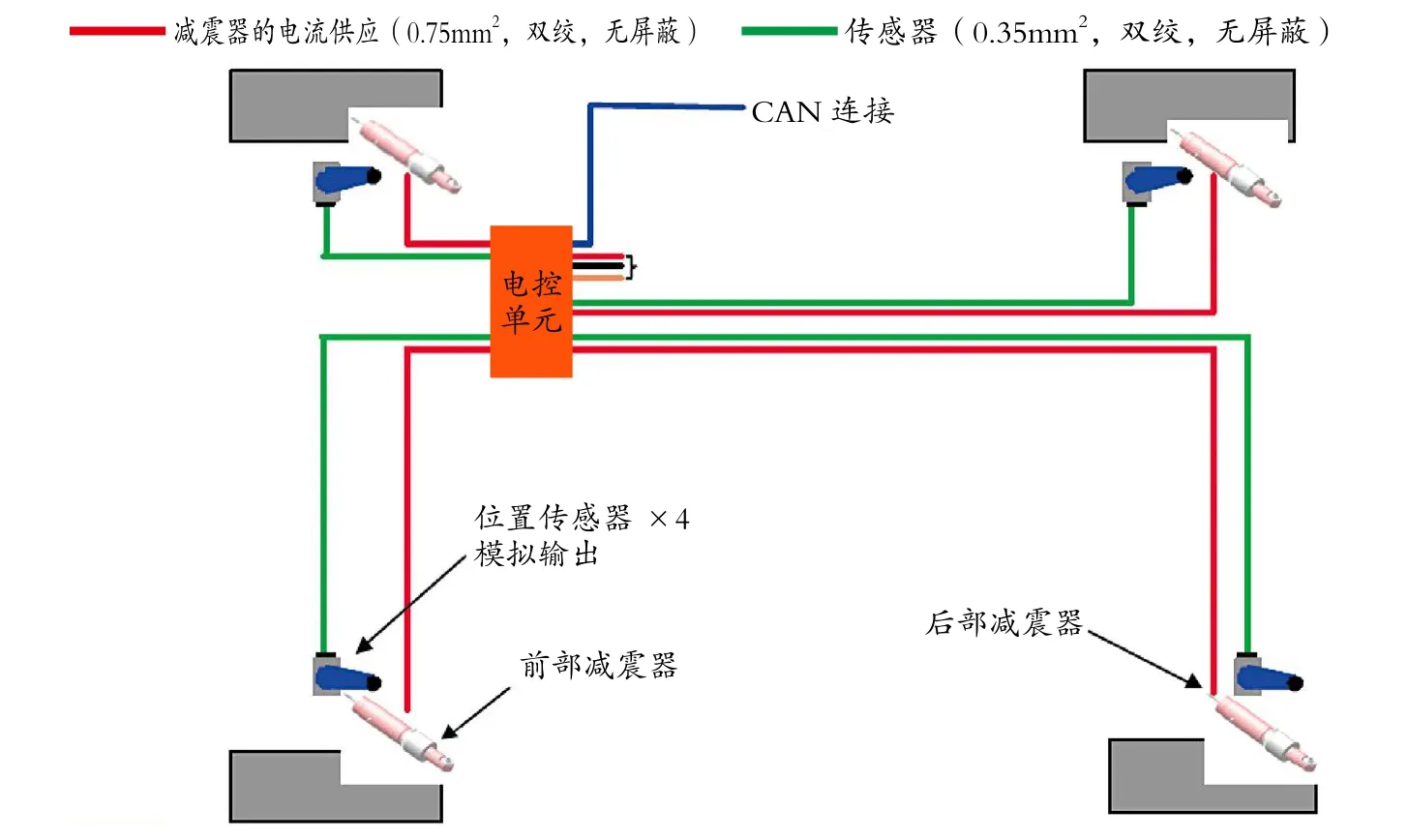
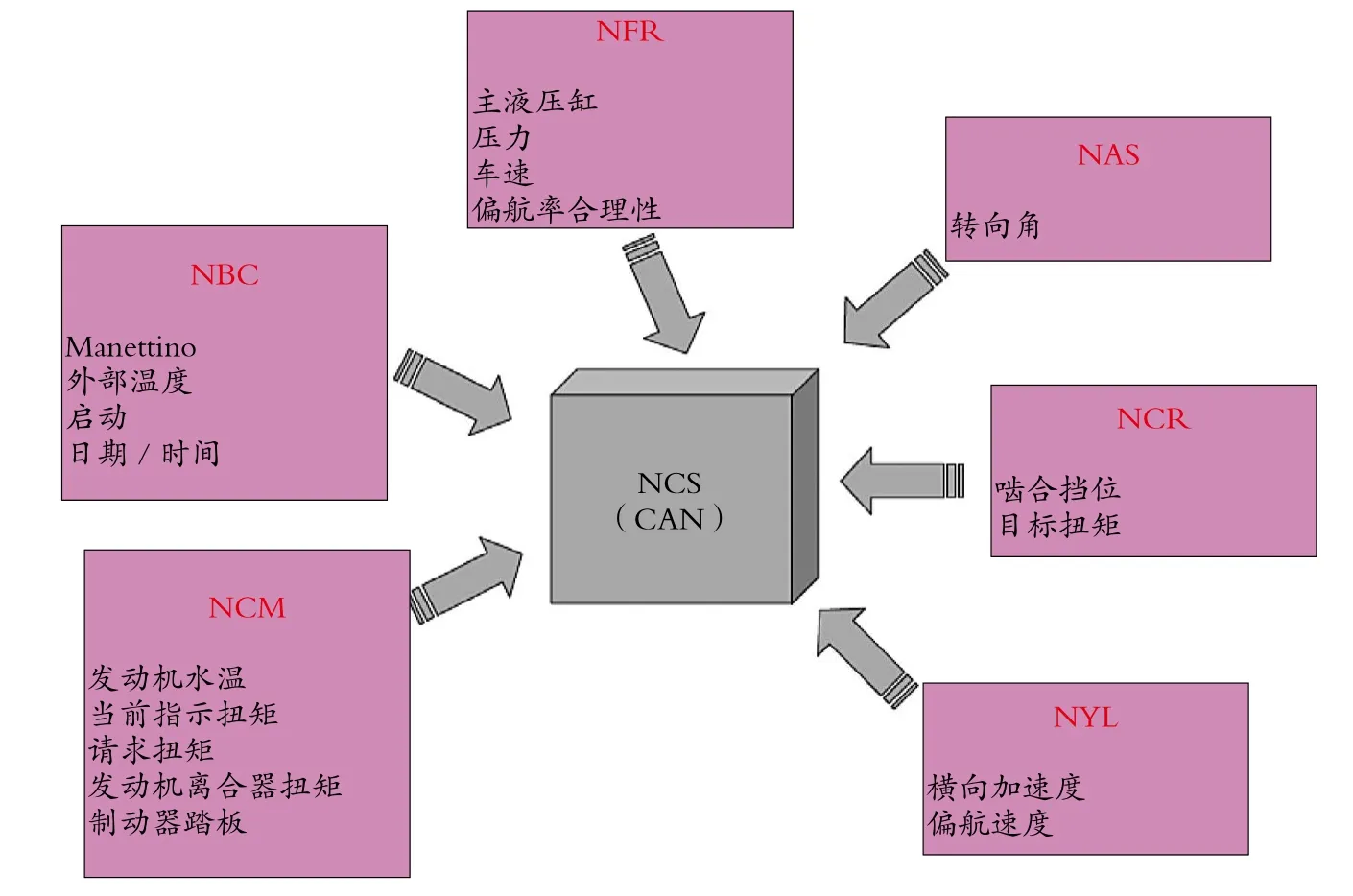
5.系统
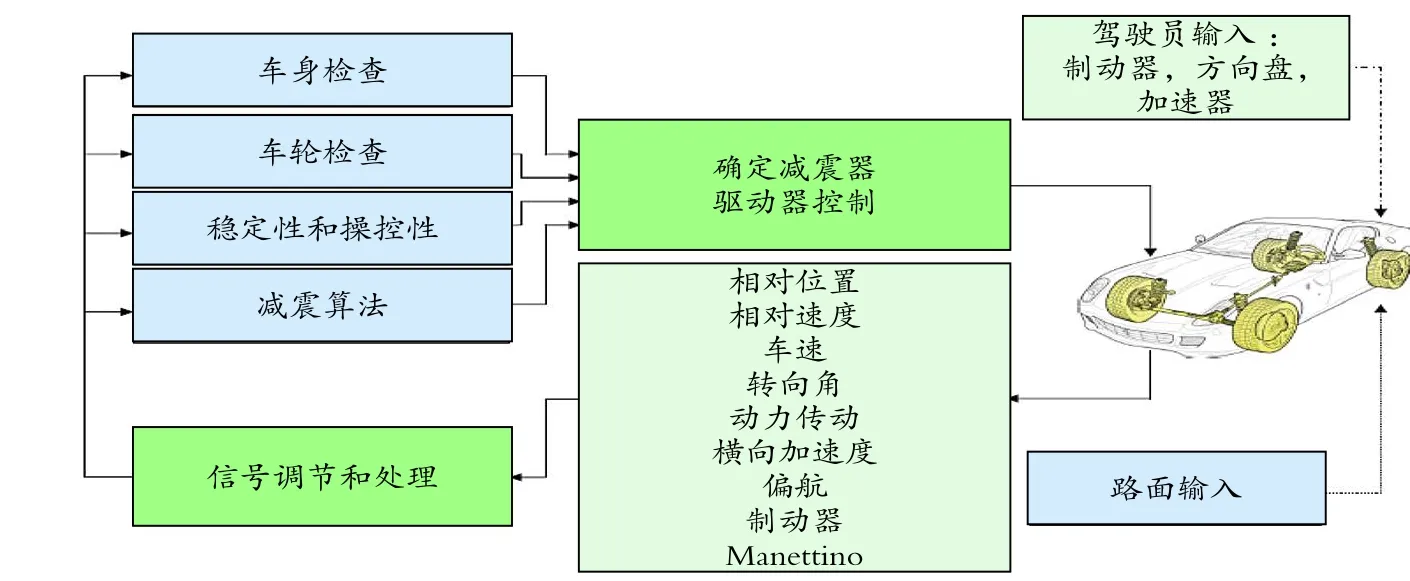
系统图如图53和图54所示。
6.位置传感器
非接触比值计——位置传感器,如图55所示。
基于位差角的线性电压响应,如图56所示。
7.减震器结构
减震器结构如图57所示。
◆作用电流: 0~5A
◆90%激活时间: 8ms
8.工作策略
工作策略如图58和图59所示。
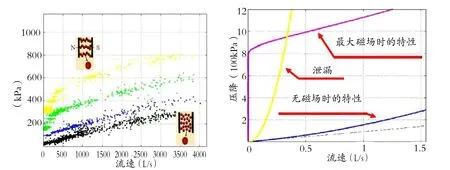
┃ 图49 流速比特性图
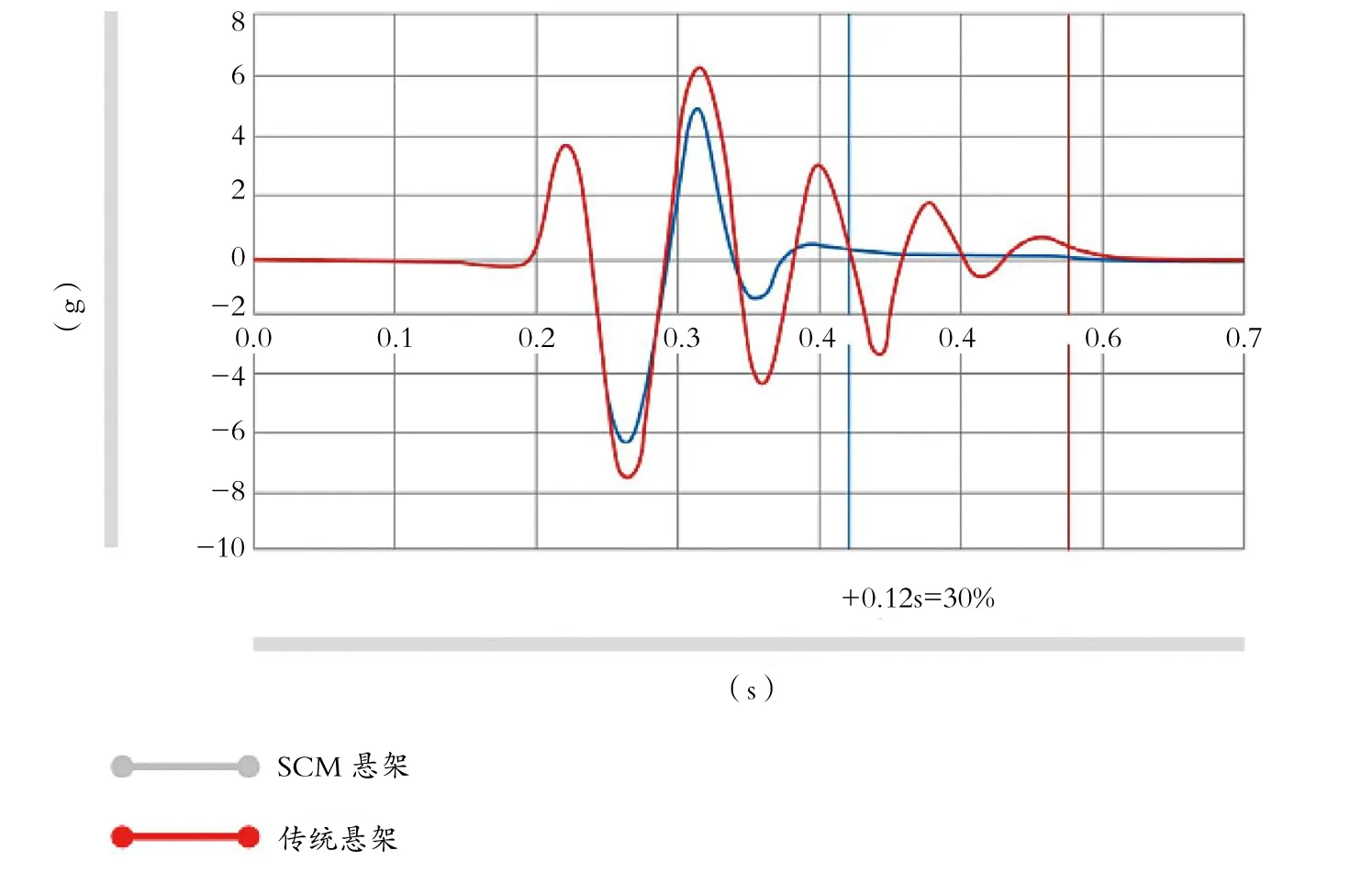
┃ 图50 垂直车轮加速度
┃ 图51 悬架控制

┃ 图52 Delphi电控单元

┃ 图53 系统图1
◆流体温度的初次估计(减震器上测得的电阻)
◆流体温度的二次估计(减震器耗散的能量), 在电控单元逻辑控制的合理性检查后,如果解除初次估计,则激活该二次估计
◆在流体温度的基础上校正施加的电流
◆减震器温度的固定估计:如果由于缺少二次估计使用的信号而解除二次估计算法,则采用该策略
◆热保护恢复:如果工作温度超过110°,电控单元限制传输给减震器的电流,这样温度可以重返正确的工作范围
电阻基础:每个减震器的初始电阻值在称为冷启动的阶段中保存,该阶段在发动机温度和环境温度之差不超过5℃时激活。在冷启动阶段,电控单元读取每个减震器上的电阻值,将其保存为“0”,并将其与相对温度值进行关联,相对温度是在驾驶时与读取的瞬时值比较。
能量基础:减震器的初始温度值在冷启动阶段的基础上定义,通过钥匙关闭阶段保存的值与钥匙开启阶段实时读取的值之差进行计算。这些值通过CAN,与环境和发动机温度一起接收。
◆ICE(冰面):使用与WET模式使用相同的校准,如图60所示
◆WET(湿滑):柔性校准,优化吸收道路颠簸,适宜于确保湿滑路面上更好的抓地
◆SPORT(运动):正常驾驶和长距离公路驾驶的优化校准。在运动型驾驶中不影响安全性
◆RACE(赛车):略微刚性的校准,优化用于高速的运动型驾驶
◆CST OFF:使用RACE模式校准
◆正常模式:舒适与操控
◆运动模式:操控和舒适略微降低,但是汽车在高速时提供增强的灵活性和“驾驶感觉”
┃ 图54 系统图2
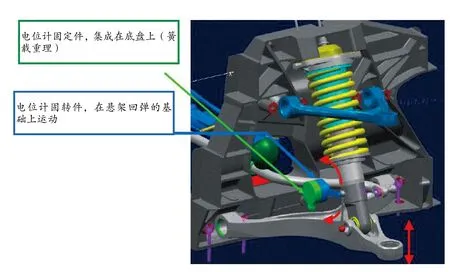
┃ 图55 位置传感器位置
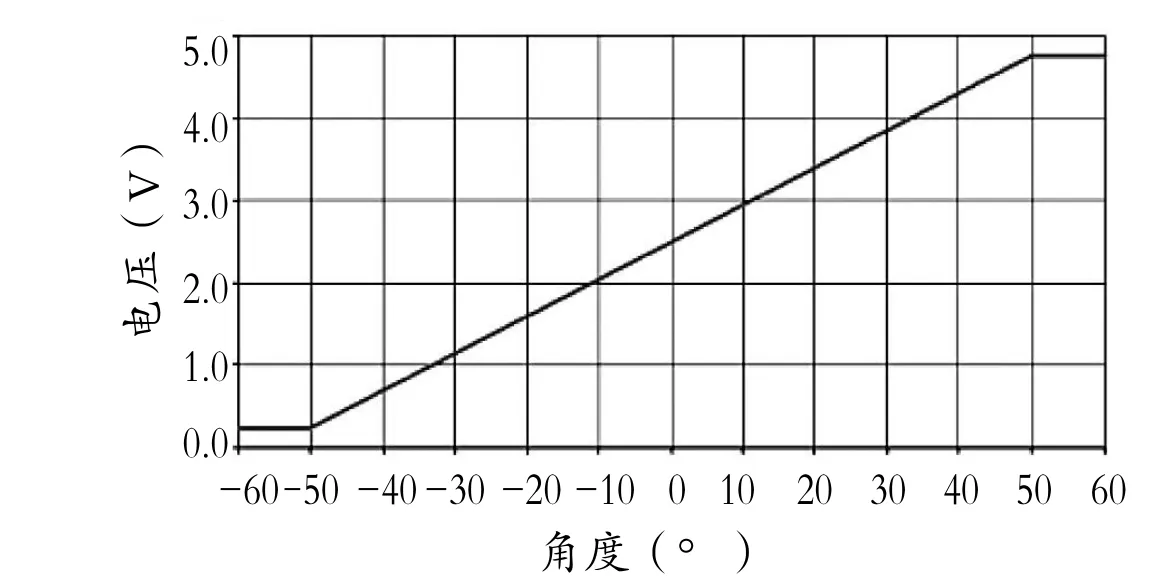
┃ 图56 线性电压
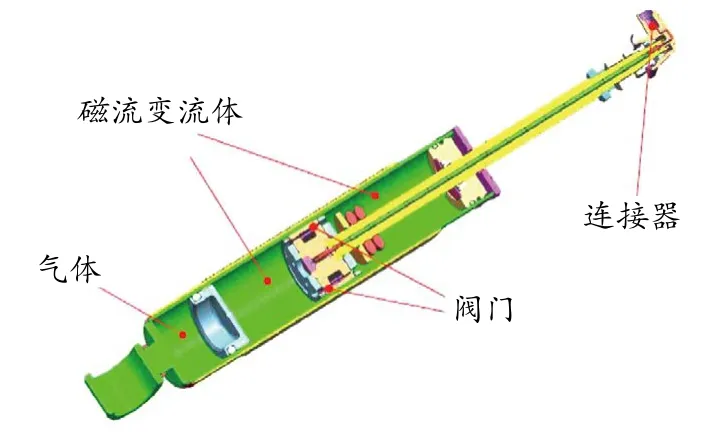
┃ 图57 减震器结构
◆故障模式1:悬架采用常量电流控制,提供与无源减震器相同的响应
◆故障模式2:悬架未受系统控制,在该情况中,减震器具有最大柔度
9.SD3诊断
(1)内部控制模块故障
◆微处理器内存(RAM、Flash/ROM、EEPROM)
◆内部通信总线(例如安全开关)
◆内部输入输出硬件回路
◆组合主控/监视器通信
(2)接线/输入装置故障
◆位置传感器的输入超出范围(断路、B+短路、接地短路)
◆电池电压或钥匙状态电压超出范围
(3)接线/输出装置故障
◆减震器输出控制(断路、B+短路、接地短路、负载间短路)
◆传感器电源调节
◆驱动器状态输出
(4)外部通信故障
◆CAN总线硬件
◆CAN信息超时(通过多个故障,每条信息一个)
◆CAN信号合理性
(5)恢复模式示例
◆无速度信号→使用默认速度;保持残余控制软件功能
◆无转向角信号→使用默认转向角(0); 禁用转向角所需的稳定性和操控性算法。标记激活防止驾驶员禁用ESP系统
◆位置传感器超出范围→最低控制取决于悬架上测量的速度,结合剩余传感器上的稳定性和车轮控制
◆传感器电源(所有传感器共享)→最低控制取决于速度
◆电控单元闪存ROM故障→解除所有主要功能,看门狗控制激活,请求闪存重新编程
(6)故障码
故障码如表14所示。
┃ 图58 减震器工作策略1
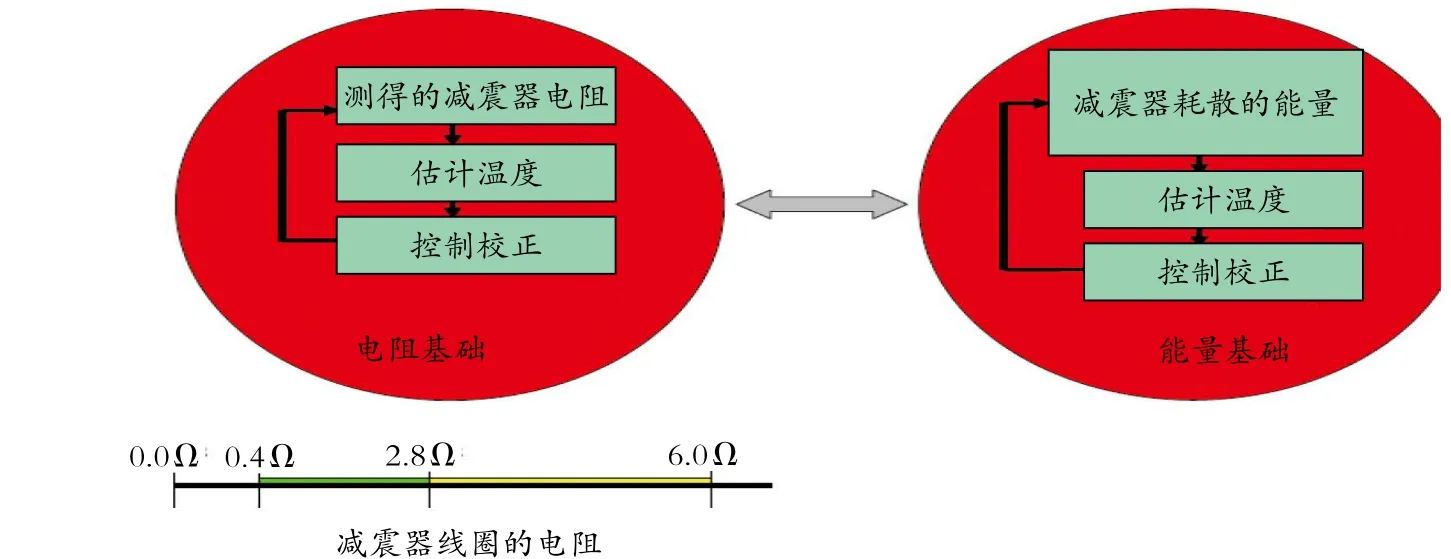
┃ 图59 减震器工作策略2

┃ 图60 校准
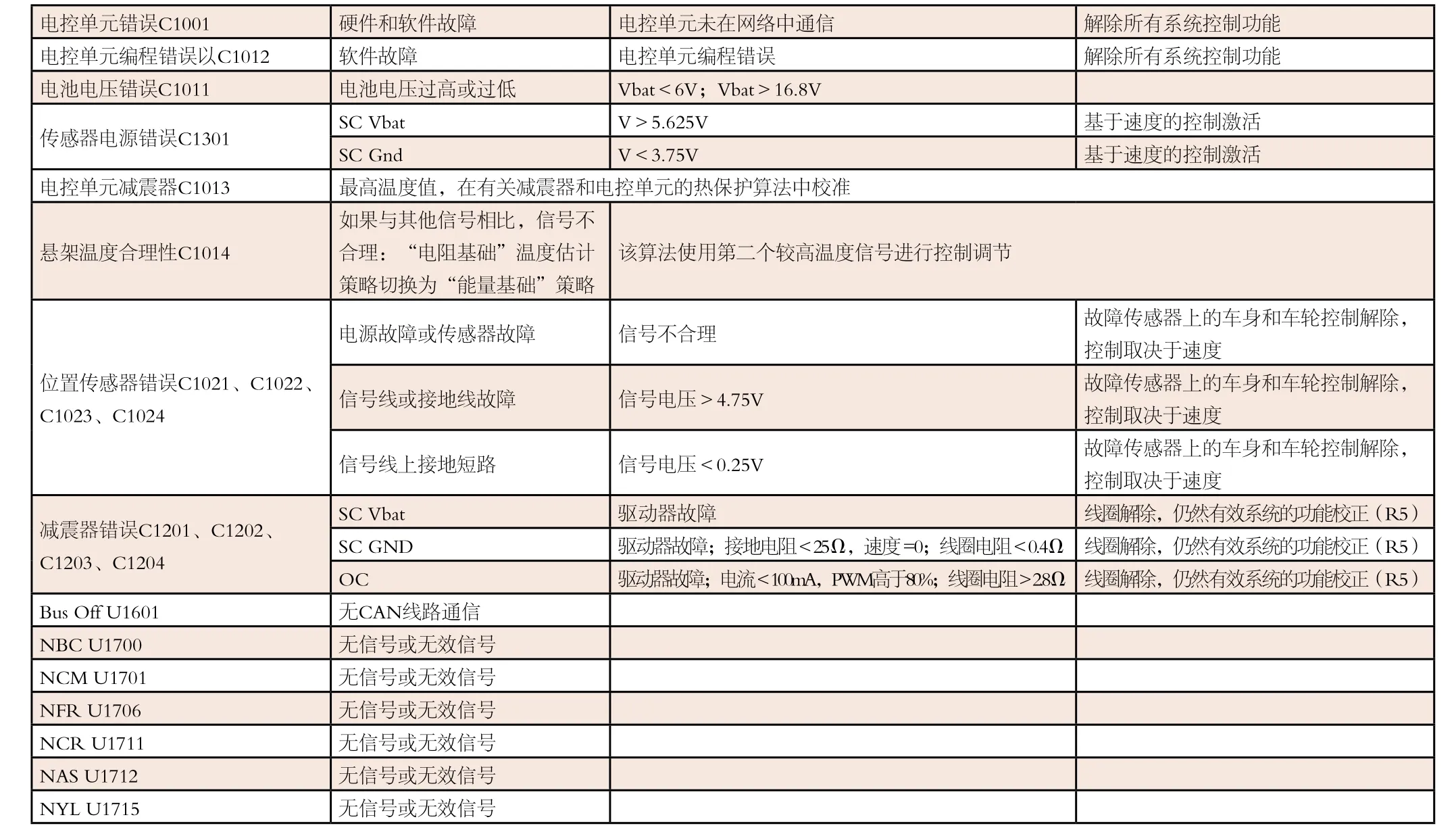
表14 故障码
(全文完)
