洱海湿地昆虫智能识别与实时监测系统
2018-07-05罗桂兰杨自忠吴仕龙
罗桂兰,杨自忠,张 梅,吴仕龙,张 倩,安 东
(1.大理大学数学与计算机学院,云南大理 671003;大理大学昆虫生物医药开发研究院,云南大理 671003)
有效的诱捕器和诱饵是昆虫监测和调查最广泛的方法〔1〕。而基于计算机的色彩、声音、形态、空域纹理和频谱纹理等多特征研究是目前昆虫识别的关键技术〔2〕。对于野外活体昆虫的实时监测和动态识别需要昆虫监测与识别的有效动态结合。
在昆虫监测方面,根据昆虫的趋性原理市场上已有各种诱捕器。例如利用趋光性设计的灯光诱捕器,通过频振杀虫灯就可高效地诱杀棉铃虫;利用趋色性设计的粘虫色板诱集,通过银灰色塑料薄膜可诱杀对银灰色敏感的蚜虫;利用趋化性设计的嗅觉诱捕器,通过跟踪信息素可诱杀白蚁。随着现代信息技术的发展,诱捕器的精准性、高效性、快捷性、综合性等指标已成为虫情监测新要求。美国农业部利用红外传感器技术研制出一种谷类害虫探测计数系统,能实时监测仓储害虫,计数精确度达95%以上〔3〕。可见多功能、智能化、自动化、专业化的诱捕器是虫情监测发展的必然趋势。利用雷达、计算机视觉、微电子、预测决策和网络信息等高新科技技术开发新型诱捕器势在必行。
在昆虫识别方面,国内西安电子科技大学基于ELM理论设计了一种昆虫分类器〔4〕,昆虫识别正确率达到97%。文献〔5〕采用基于电流变化感应和矩阵按键识别技术实现了昆虫自动计数。CN 101546094A公开了一种基于CMOS图像传感器的发明专利,其以数字化形式实现了0.1 mm~2 cm大小的爬行动物如蚂蚁、蜘蛛的足迹监测与跟踪等〔6〕。现有这些识别技术都采用了计算机的软件、硬件和相关算法等,特别适合昆虫标本的研究,但对于活体昆虫识别有待改进。
研究发现,鳞翅目、鞘翅目、直翅目等昆虫是湿地的优势群体。这类昆虫隐蔽性强,传统监测难度大〔7-10〕。从系统的成本、效率、便捷等方面考虑,本文借助物联网、现代通信网络等信息技术,为实现昆虫的网络实时观测和生命特征参数统计,设计了一种基于多特征昆虫识别算法的活体昆虫智能识别与监测系统。
1 智能识别与实时监测系统设计
1.1 系统功能架构 根据洱海湿地生态环境的差异性将湿地划分为若干个监测区域,每个监测区域根据硬件监测范围大小和地形确定监测点数量(2~10个)及部署方式(随机、网格、圆形等形式)。监测点之间相互独立,所有监测点数据最终都上传到同一个云服务器。
以一个监测点为例,在整个监测过程中,各类传感器实现昆虫特征数据采集。系统首先利用红外传感器模块监测进行昆虫计数,其次利用超声波传感器监测是否有活体昆虫,再次利用声音、颜色图像传感器识别昆虫种类。中央处理器完成传感器数据融合处理,并通过4G或WIFI通信方式将特征信息传送到云服务器,再由云服务器进行数据存储、计算和统计分析等。而终端设备(个人电脑、平板、手机等)可通过APP或浏览器实现昆虫数据动态实时观察。
监测系统功能模块架构见图1。

图1 监测系统功能模块架构
系统运行中利用LED灯产生的紫光进行诱虫,与此同时开启360°网络摄像头进行昆虫行为监测,并将视频传送到云服务器进行实时监测。硬件模块架构见图2。

图2 硬件模块架构
1.2 监测节点硬件模块设计 一个监测点主要由LED诱虫灯、昆虫生命监测、昆虫特征识别、动态行为监测和中央处理器等模块构成。
1.2.1 昆虫生命监测模块 该模块在监测区域内首先采用红外对射计数传感器实现昆虫计数,再次利用超声波传感器监测是否有活体昆虫。从而判断出昆虫的生命特征。
1.2.2 特征识别模块 本模块采用声音传感器、颜色传感器和CMOS图像传感器进行昆虫色彩、声音、形态和纹理等多特征数据采集,并将特征信息传输至云服务器,由云服务器通过多特征昆虫识别算法判定昆虫种类特征等。
1.2.3 中央处理器模块 可选用嵌入式芯片或单片机。在成本允许情况下,优先选用嵌入式芯片。采用单片机为控制芯片时成本较低,但数据处理能力和精确度有限。
1.2.4 LED诱虫灯模块 昆虫的趋光性可以刺激其视觉神经激发昆虫的可见光区主要在330~400 nm的红外光波,尤其是鳞翅目和鞘翅目昆虫对红外光特别敏感。针对湿地活体昆虫研究趋光性灯光诱捕较为适合。该模块可以由中央处理器控制LED发出的紫光实现,也可以采用多个独立的LED诱虫灯。
1.2.5 动态行为监测模块 该模块独立于中央处理器。选用360°网络摄像头,通过4G或WIFI直接与云服务器相连接。
2 多特征昆虫识别算法
2.1 生命特征识别原理
2.1.1 昆虫计数方法 通过红外对射计数传感器进行昆虫计数。当有昆虫通过时光被遮挡住,接收模块通过输出的高电平脉冲进行昆虫计数统计。为提高红外监测范围和精确度,在每个监测区域可采用多红外对射计数传感器进行部署监测,部署方式根据传感器监测范围和监测区域的地形等决定。2.1.2 昆虫活体监测方法 超声波是一种振动频率高于声波的机械波,在碰到活动物体能产生多普勒效应。目前超声波传感器广泛应用在工业、国防、生物医学等方面。超声波传感器特别适合“空气”介质工作,更适合精确监测相对较小的物体。
本文在每个监测区域都部署了超声波传感器。将发送器和接收器布置在昆虫监测范围的中心,反射板置于监测范围的边缘,并以无昆虫遮挡时的反射波衰减值作为基准值,当反射波衰减值比基准值小时,说明监测范围内有昆虫通过,从而实现昆虫活体监测。
2.2 声音特征识别原理 声音识别采用了人类语音识别领域的技术〔11〕,并在这个基础上提出一种新颖的、简单可行的昆虫声音自动鉴别方法,用声音参数作为昆虫声纹识别设计了一种简单易行的识别算法。
声音信号首先经过预处理、分段得到一系列的声音样本,然后从声音样本中提取Mel倒谱系数(Mel Frequency Cepstrum Coefficient,MFCC),并用LBG(Linde-Buzo-Gray)算法对提取的MFCC进行矢量量化(VQ),所得码字作为声音样本的特征模型。声音识别流程见图3。

图3 基于VQ的昆虫声音识别流程图
本文中采用LBG算法形成代表声纹特征的VQ码本,LBG算法是由Linde Y、Buzo A和Gray RM三人提出的。此算法按最近邻准则用初始码本中的各个码字对训练序列进行划分,从而形成J个子集,每一子集为一类,J为码本容量〔12〕。
2.3 颜色特征识别原理 颜色作为物种的固有特征,是进行物种鉴定的重要依据之一。本文采用RGB图像颜色分布直方图的方法,首先将H分量量化16级,将S分量和V分量分别量化为4级,然后将3个颜色分量合成为一维特征向量:

其中,QS、QV分别是S和V的量化级数,L取值范围[0,255],最后计算L的直方图分布,根据图像RGB值判断识别对象的颜色。L计算方法如下:颜色特征识别算法流程见图4。

2.4 算法实现步骤 第一,先利用硬件平台上的红外识别模块和超声波模块来识别周围有无生命迹象,模块正面感应范围为5~7 m,感应角度<100°,最外围感应距离为3~4 m。若能在此范围内识别到有生命迹象则昆虫计数,并执行下一步算法,即声音识别算法,若监测不到周围3~5 m范围内有生命迹象,则结束算法。

图4 颜色特征识别算法流程图
第二,完成上一步红外识别算法之后执行基于Mel倒普系数和VQ的声音识别算法,本次声音监测算法的频率范围在3~8 KHz,如果被识别对象的声音频率在此范围内,则执行下一步算法,即颜色识别算法,若被识别对象的声音频率不在此频率范围之内,则结束算法。
第三,完成上一步声音识别算法之后执行基于RGB彩色图像直方图的方法来监测识别对象的颜色,通过定义R、G、B3个数值的范围,R取值范围是0~255,G取值范围是0~255,B取值范围是0~255,根据RGB三原色的3个数值来判断识别对象的颜色。
2.5 算法程序设计 根据上节算法实现步骤,算法程序设计流程见图5。

图5 程序设计流程图

图7 原始声音信号图和FFT后的波形图
3 系统仿真与性能分析
3.1 昆虫声音识别仿真分析 蝈蝈属于直翅目螽斯科,其翅短,鸣声清脆响亮。体色分绿色和褐色两种,身形硕大。本文选用蝈蝈作为实验对象,对其声音和颜色进行实验识别测试。
利用Matlab进行声音识别仿真设计与性能分析,实验结果见图6~7。

图6 昆虫声音识别算法仿真GUI界面
从图7可见:原始语音信号经过傅里叶变换信号比较平稳。语音波形是时间的连续函数,因而音到音之间有逐渐过渡。
3.2 昆虫颜色识别仿真分析 利用Matlab进行声音识别仿真设计与性能分析,实验结果见图8~10。

图8 昆虫颜色识别算法仿真GUI界面

图9 蝈蝈彩色图像的H、S、V分量图
由图9可见:首先将H分量量化16级,将S分量和V分量分别量化为4级,然后将3个颜色分量合成为一维特征向量L,得出H、S、V的分量图,然后通过H、S、V的分量图画出色彩量化后的RGB图像。
RGB_image=cat(3,PR,PG,PB);%将 PR、PG、PB 3个矩阵在第3个维度上进行级联,进行图像合成
PR=RGB_image(:,:,1);%提取红色分量PG=RGB_image(:,:,2);%提取绿色分量PB=RGB_image(:,:,3);%提取蓝色分量
从图10仿真结果可得:仿真图的横坐标表示的是图像中各个像素点的灰度级,而纵坐标表示的是各个灰度级上各个像素点出现的次数。在[0~100]这一灰度级上,B值出现的次数比R和G都多,即蓝色值点数多。在[100~255]这156个灰度级上,G值出现的次数明显高于R和B,说明绿色值点数多。由此表明识别的彩色图像偏于绿色。
3.3 算法性能分析 昆虫识别算法可以根据目标识别处理的层次进行区分。监测、分类和识别是目标识别性能的前3个层次。
目标监测:从传感器数据中发现潜在目标是否存在的处理过程。
目标分类:区分目标类型的处理,即区分识别对象的类别,例如昆虫是属于哪一目哪一科。
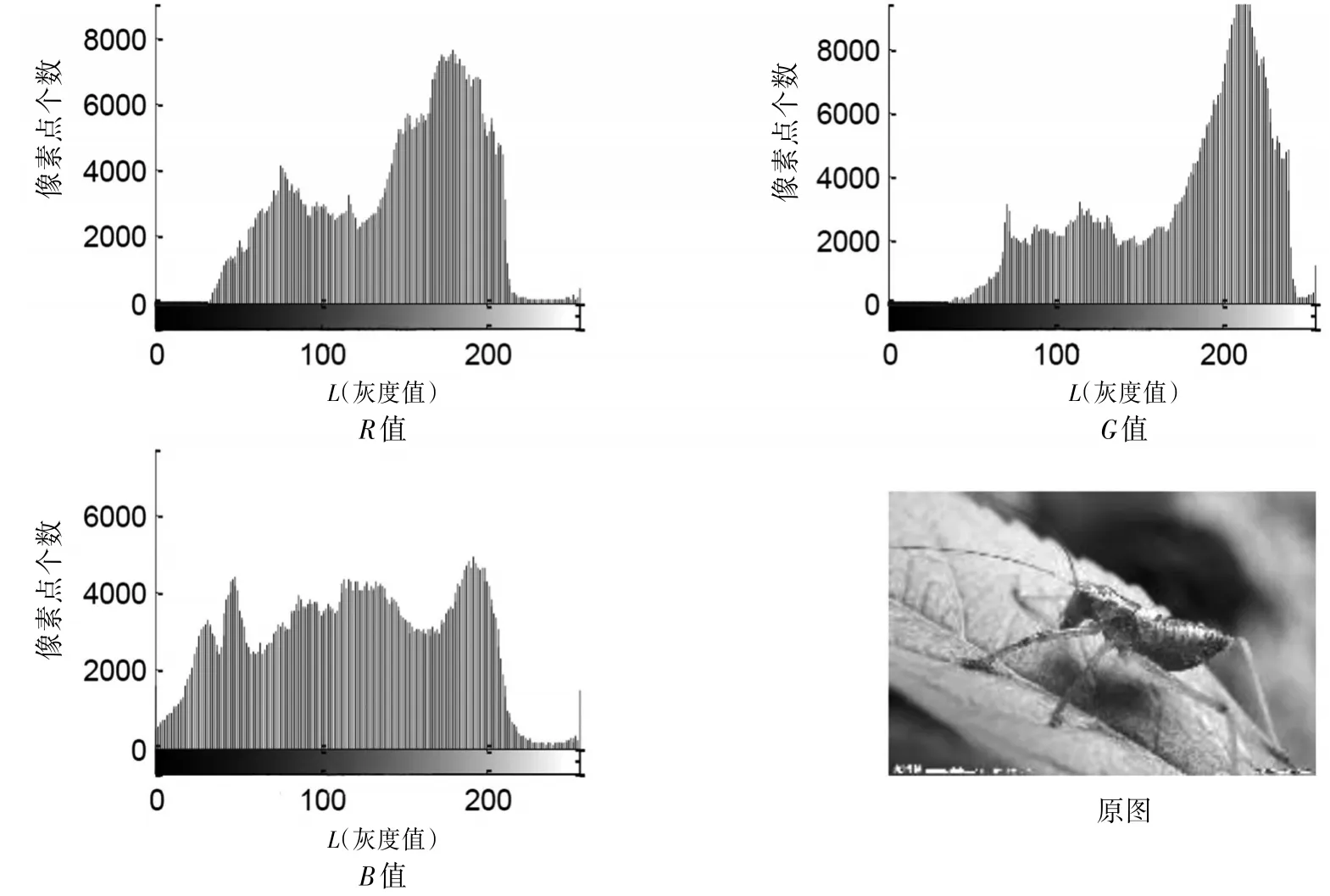
图10 蝈蝈彩色图像的R、G、B值
目标识别:在更高层次的给定目标类型中辨认出目标。就是在某一科或者某一种昆虫中识别出具体是哪一种昆虫。
已有的昆虫图像分割技术,都是根据昆虫的图像进行特征的提取,再通过分类算法、ID3决策树方法、边缘监测算子、相关反馈方法等算法进行昆虫的识别和分类〔13-14〕。故本文对相关反馈方法、图像边缘监测算法以及本文智能昆虫识别算法3种昆虫识别算法进行时间复杂度和空间复杂度比较分析,以发现算法在时间和空间上的效率。
3.3.1 时间复杂度 算法的时间复杂度即一个算法执行所消耗的时间,一个算法花费的时间与算法中语句的执行次数是成正比的,一个算法中的语句执行次数称为时间频度或语句频度。所谓时间复杂度就是执行本次算法所需要的计算工作量。时间复杂度用O表示为

根据3种算法的运行时间,以频度n作为自变量,时间t作为因变量,得出算法时间复杂度比较,见图11。

图11 算法时间复杂度比较
由图11可见:智能昆虫识别算法的时间复杂度是最小的。在时间上验证了智能昆虫识别算法的优越性。
3.3.2 空间复杂度 与时间复杂度类似,空间复杂度是指算法在计算机内执行时所需存储空间的度量。算法执行期间所需要的存储空间包括3个部分:算法程序所占的空间、输入的初始数据所占的存储空间、算法执行过程中所需要的额外空间。算法的空间复杂度用O′来表示为

根据3种算法的程序占用空间即使用的资源,以频度n作为自变量,使用资源作为因变量,得出算法空间复杂度比较,见图12。

图12 算法空间复杂度比较
由图12可见:智能昆虫识别算法的空间复杂度是最小的,即程序占用存储空间是最少的。在空间上验证了智能昆虫识别算法的优越性。
4 结论
本文基于单片机和无线传感器,将传感器模块嵌入单片机,利用传感器网络成本低廉、部署方便以及灵活的特点,根据昆虫的红外、声音、颜色等特征设计了基于多特征昆虫智能识别与监测系统,通过时间复杂度和空间复杂度验证了算法的可行性和智能化。
该昆虫智能识别与实时监测系统目前已应用于国家自然科学基金“洱海湿地昆虫群落普适生境网络生态行为研究”项目昆虫智能采集中。实验基地分别设在洱海月湿地公园、罗时江湿地、洱源东湖湿地3个湿地,可识别出典型的直翅目、革翅目、鞘翅目等昆虫种群。但昆虫识别准确率还有待大量应用测试与统计分析。
〔1〕刘璇.不同诱捕技术对鞘翅目诱捕效果比较及昆虫多样性研究〔D〕.哈尔滨:东北林业大学,2015.
〔2〕任莹莹,匡红梅.人脸监测与识别综述〔J〕.科技广场,2009(9):114-115.
〔3〕林明江,安玉兴,管楚雄,等.害虫诱捕器的研究与应用进展〔J〕.广东农业科学,2011,38(9):68-71.
〔4〕徐源浩,齐焕芳.基于ELM理论的昆虫分类〔J〕.电子科技,2015,28(3):33-37.
〔5〕余俊霖.昆虫实时捕捉、监测与死亡时间诊断的研究〔D〕.杭州:浙江大学,2014.
〔6〕孙卫伟,田怀军,余小平,等.一种昆虫跟踪装置:重庆,CN102630644A〔P〕.2012-08-15.
〔7〕胡逢付,吴少虹,陈岳平.庆元松源溪湿地昆虫资源调查初报〔J〕.林业科技情报,2016,48(4):40-43.
〔8〕贾克锋,童翠姣,徐志宏,等.衢州乌溪江国家湿地公园昆虫调查及区系分析〔J〕.浙江林业科技,2015,35(3):61-67.
〔9〕贾克锋,童翠姣,徐志宏,等.乌溪江国家湿地公园昆虫种类调查和种群多样性分析〔J〕.浙江林业科技,2015,35(5):76-79.
〔10〕和秋菊,易传辉,杨宇明,等.云南高原水生昆虫研究概况〔J〕.西南农业学报,2012,25(1):314-317.
〔11〕刘璇,胡春祥,曹传旺,等.3种植物源引诱剂对鞘翅目甲虫引诱效果比较〔J〕.林业科学,2016,52(10):153-160.
〔12〕竺乐庆,王鸿斌,张真.基于Mel倒谱系数和矢量量化的昆虫声音自动鉴别〔J〕.昆虫学报,2010,53(8):901-907.
〔13〕王江宁,纪力强.昆虫图像分割方法及其应用〔J〕.昆虫学报,2011,54(2):211-217.
〔14〕兰红,王璇.基于多元线性回归的昆虫图像分割方法〔J〕.计算机应用与软件,2013,30(7):193-196.
