油井抽油机悬点位移测量创新研究
2018-07-05仲志丹张玮琪
仲志丹,张玮琪
(河南科技大学 机电工程学院,河南 洛阳 471003)
示功图用于分析抽油机采油井的故障原因、工作状态等,是判断抽油机各项参数的选择是否合理的重要参考依据之一[1]。示功仪通过检测抽油杆周期性上下运动时不同位移处抽油杆所承受的载荷来绘制示功图,以反映油井的工作状况[2]。近年来,工业领域以加速度传感器为基础研发了新型示功仪,其操作性与使用寿命明显高于传统拉线式示功仪,但在实际实用中仍存在一些问题。抽油机运动过程中存在的各种机械振动,加上传感器本身存在的漂移问题,使加速度传感器采集到的数字信号中混有干扰噪声和趋势项,还有积分过程中存在的周期误差,这些问题都会使位移产生明显的偏移,甚至会导致载荷、位移曲线无法闭合。因此,如何对系统采集到的加速度信号进行消除噪声、去除趋势项及优化计算周期,已经成为了目前油井示功图研究中亟需解决的问题。
针对传统二次积分计算位移所存在的诸多缺陷,采用对脉冲噪声消除效果较好的中位值与五点三次平滑滤波相结合的复合滤波法进行去噪,用改进的周期提取算法来提高积分计算周期的精度,并利用提取复杂趋势项效率极高的经验模态分解法EMD(empirical mode decomposition)解决采样信号中趋势项过大的问题。加速度信号的具体处理流程如图1所示。

图1 加速度信号处理流程示意
1 滤波消噪
为有效消除信号中的噪声,有研究学者运用形态滤波、改进滑动滤波、限幅和递推平滑复合滤波、卡尔曼滤波[3-6]等方法处理加速度信号中的噪声,最终位移的测量精度虽有一定的提高,但在实际应用中仍存在各种缺陷: 形态滤波算法复杂且兼容性差,受结构元素的影响较大;改进滑动滤波法虽算法简单,操作较易实现,但脉冲干扰会减弱消噪效果;限幅和递推平滑复合滤波法的消噪能力不易控制,通常随限幅滤波器限定值的变化而变化,甚至会导致信号失真;运用卡尔曼滤波法可达到高精度的消噪结果,但步骤繁琐、实验数据需求量大,不适用于示功图位移测量系统[7]。
对比各种滤波算法的应用局限性,采用对脉冲噪声消除效果较好的中位值平均滤波法与五点三次平滑滤波法相结合的复合滤波方法来消除加速度信号中的脉冲噪声和随机噪声。
1.1 中位值滤波法
中位值滤波法是一种简单高效的滤波算法,方法简单易实现、实时性好,且能有效克服偶然因素引起的波动干扰,对变化缓慢的被测参数有良好的滤波效果。
设有一维序列为f1,f2, … ,fn;取窗口长度为m,m为奇数,从输入序列中连续取样m次:fi-v, … ,fi-1,fi,fi+1, … ,fi+v,其中fi为窗口中心值,v=(m-1)/2;将这m个点按数值大小排序,取其序号中心点的对应数值作为滤波输出,即为中位值平均滤波的最终结果。数学公式表示为
Yi=Med{fi-v, … ,fi-1,fi,fi+1, … ,fi+v}
(1)
式中:Yi——序列fi-v, … ,fi-1,fi,fi+1, … ,fi+v的中位值,i∈N。
1.2 五点三次平滑滤波概述
五点三次平滑滤波法是对采样信号进行3次最小二乘多项式平滑处理,以抑制信号中的随机噪声。该方法基于最小二乘法思想,运用Savitzky-Golay滤波法的同时推导出边界的数据点,即: 取相邻5个数据点拟合出1条3次曲线,将3次曲线上相应位置的数据值作为滤波后的结果。具体滤波过程如式(2)所示。
(2)
式中:q——采样过程中的采样点总个数;p——加速度信号中的某个采样点,且p=3,4, … ,q-2。
2 改进周期算法
由于抽油机的运动周期是消除加速度信号和速度信号中直流分量的基础,当周期计算存在误差时直流分量消除不彻底,残留的直流分量会在积分的过程中被放大,最终影响系统位移的测量精度,导致信号严重失真。因此,周期计算方法的选取是影响位移测量精度的关键因素之一。为消除周期产生的累积误差,研究学者在过零点法[8]的基础上提出了查找相邻波峰(波谷)的方法[3-4],周期计算精度虽大幅提高,但存在对环境的信噪比要求高、采样信号的幅值相差较大时信号稳定性差等诸多问题。
采用改进的周期计算方法提高了周期精度,首先找到滤波后的amax和amin,再选定M个大小在amax~amin的幅值,再找出滤波后加速度信号和这M个值的交点。由于加速度信号是离散信号,因而找到满足式(3)的点即可:
ak≤a≤ak+1
(3)
根据“幅值最接近选定值”、“距离相等取中间”两大原则合并交点,统计间隔1个周期的2点距离和,计算出距离的平均值,再乘以信号的采样间隔即为加速度的周期。具体的计算处理过程如图2所示。

图2 改进周期计算方法流程示意
3 经验模态分解法去除趋势项
针对加速度信号中趋势项的混杂问题,采用基于最小二乘法的多项式法[7]及隔直去噪滤波器法[9]进行拟合处理,该方法的测量精度虽有提高,但不适用于趋势项变化复杂的场合。经分析对比,采用效果良好、运用场合灵活的EMD去除趋势项。
EMD是由美国的黄锷博士提出的一种提取复杂趋势项效率极高的自适应信号时频处理方法[10-12],适用于直流分量、线性、多项式、指数等各种较复杂趋势项类型。运用EMD不需要预先设定基函数、趋势项的类型、次数及频率范围,而是通过1个“筛分”的过程把待处理信号分解为一系列的固有模态函数和趋势项。“筛分”的具体步骤如下:

(4)


x(t)1=x(t)-IMF1
(5)
3) 对x(t)n多次进行步骤2)所述过程,直至x(t)n为单调函数为止:
x(t)n=x(t)n-1-IMFn
(6)
最终待处理信号可表示为
(7)
式中:x(t)n——趋势项。
4 实例分析
在某油田采油厂进行了算法的现场测试,采集多口不同类型油井光杆的加速度数据,采用中位值滤波方法、五点三次平滑滤波方法后的加速度图像与原始信号进行对比,结果如图3、图4所示。

图3 原始加速度图像示意
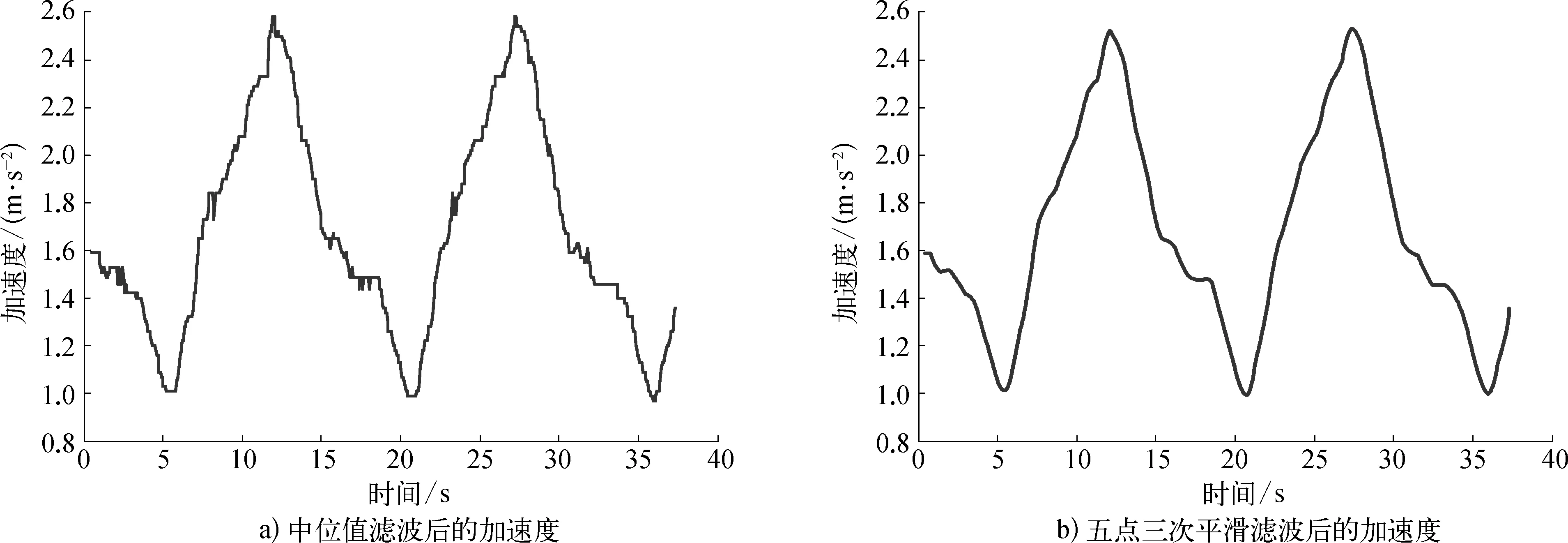
图4 滤波后的加速度图像示意
由图4b)可得到最终两次滤波后的amax=2.574 5 m/s2,amin=0.975 5 m/s2。综合考虑测量精度和计算量,文中选取M为5,并找到与加速度曲线的交点。根据“幅值最接近选定值”、“距离相等取中间”两大原则进行交点合并,处理结果如图5所示。

图5 选定值与加速度交点波形示意
图5b)中,加速度值相同的点之间为1个周期,将交点距离的平均值乘上采样时间,即可得到加速度的周期。表1是使用改进的提取周期算法和传统方法计算周期后,计算时间(T)、平均误差(AE)、最大相对误差(REmax)的参数性能对比结果。
取2个周期的加速度,进行趋势项去除和零点校正后的信号图像如图6所示。

表1 不同方法计算周期结果对比

图6 去趋势项和零点校正后的加速度图像示意
进行加速度一次积分可得速度信号,对该速度信号再次去除趋势项和零点校正,处理前后速度信号对比如图7所示。
将边界条件即初始位移设置为零,对处理后的速度进行积分,用EMD去除位移中趋势项的结果如图8所示。
为验证算法的有效性,以50组现场采集的加速度作为实验数据,并用过零法[3]、查找相邻波峰(波谷)法[4]、隔直去噪滤波器法[8]分别与该新型方法进行对比实验,分析冲程数据,结果见表2所列。由表2可知,4种方法的计算时间虽相差无几,但采用新型方法所得位移测量结果的AE及REmax均有明显的下降,位移测量精度可达92.74%。
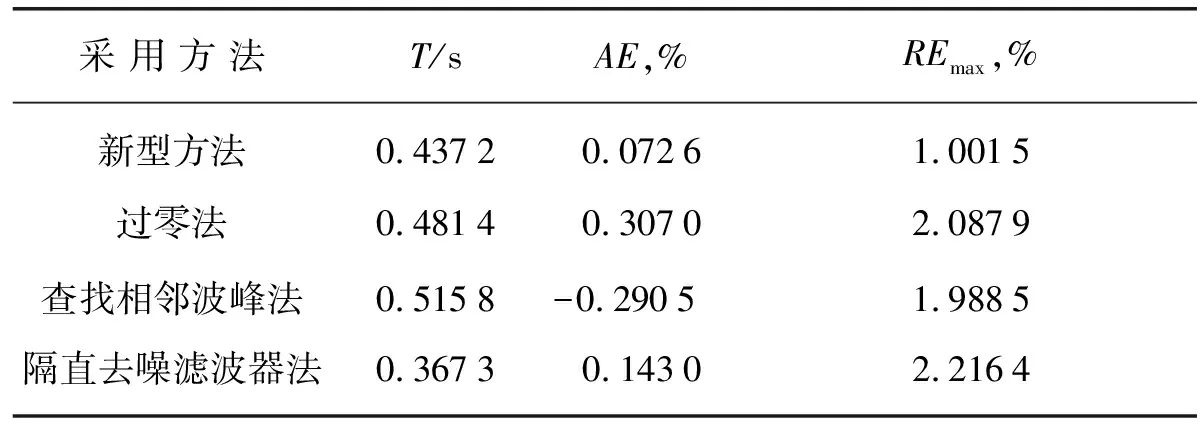
表2 采用不同方法计算结果与新型方法对比

图7 处理前后速度信号对比示意

图8 去趋势项前后的位移对比示意
5 结束语
针对目前位移测量系统中加速度滤波、周期计算和去趋势项等方面存在的缺陷,采用复合滤波可以有效消除脉冲噪声,实时性好且能有效克服偶然因素引起的波动干扰;用改进的周期计算方法,使积分的累积误差大幅下降;EMD对于直流分量、线性、多项式、指数等较复杂的趋势项类型都具有较好的提取效果。结合该油田现场数据试验表明: 与过零法、查找相邻波峰法、隔直去噪滤波器等方法相比,悬点位移测量的新型方法有效地解决了传统算法在噪声消除、去趋势项和周期计算等方面误差过大的难题,干扰噪声、直流分量、趋势项均有明显的减少。该方法稳定性高、计算速度较快,位移测量精度高达92.74%,较好地满足了抽油机悬点位移实际测量的要求,综合性能优异。
参考文献:
[1] 薛国民,沈毅. 油井计量方法及关键技术发展方向[J].工业计量,2006,16(14): 14-16.
[2] 沈承虎,容太平,蔡德均.加速度传感器在示功仪中的应用[J].仪表技术与传感器,2000(01): 40-42.
[3] 于云华,张家珍,时海涛,等. 便携式油井示功图测试仪的研制[J].科学技术与工程,2009(09): 25-30.
[4] 彭健,徐志强,周志权.基于传感器技术的有杆抽油井示功仪的研究[J].传感技术学报,2012(08): 1701-1703.
[5] Wu X, Duan L, Chen W. A Kalman Filter Approach Based on Random Drift Data of Fiber Optic Gyro[C]// Industrial Electronics and Applications. IEEE, 2011: 1933-1937.
[6] Chen W C, Gao G W, Wang J, et al. The Study of the MEMS Gyro Zero Drift Signal Based on the Adaptive Kalman Filter[C]//International Conference on Remote Sensing. Switzerland: Trans Tech Publications, 2010: 635-639.
[7] 何鹏举,冯亮.加速度信号随机噪声及趋势项实时消除方法研究[J].电子设计工程,2013(14): 15-23.
[8] 容太平,夏玉洁.形态滤波算法在油井测量数据处理中的应用[J].华中科技大学学报,2000,28 (05): 55-57.
[9] 贾德利,刘合,裴晓含,等.游梁式抽油机井下泵功图测试方法[J].石油勘探与开发,2015,42(01): 111-116.
[10] 李云飞,吴仲城.用于抽油机示功仪的载荷位移一体化智能变器[J].仪表技术与传感器,2012(02): 15-18.
[11] 李祥松,冯霏.基于EMD方法的求解发动机位移振动信号[J].中国工程机械学报,2015,13(05): 312-317.
[12] Huang N E, Shen Z, Long S R, et al. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-Stationary Time Series Analysis[J].Proceedings of the Royal Society of London A, 1998,454(1971): 903-995.
