基于涡流悬浮的可控磁悬浮小车设计
2018-07-05北京理工大学珠海学院广东珠海519088
(北京理工大学珠海学院 广东 珠海 519088)
沈祎铠,曾峙翔,冯炎青(通讯作者)
1 引言
自1922年德国工程师赫尔曼·肯佩尔提出了电磁悬浮原理以来,磁悬浮技术成为各个国家关注和研究的热点[1]。其中投入运营使用的磁悬浮列车具有运行速度高、行车平稳、对环境污染小、噪音低等优点,很快成为一种广受青睐的新型陆地运输系统。
然而磁悬浮列车在实际运行中也面临诸多实际问题。如过高的速度带来的空气阻力消耗过多的列车动力;而磁悬浮列车自身重量轻,悬浮的平稳性不易于控制等等。另一方面磁悬浮列车从原理上讲主要分为常导吸力型和超导斥力型。但是除超导悬浮以外的悬浮方式都不是自稳定的磁悬浮,悬浮稳定性是悬浮控制中研究的一个关键性问题。
南京航空航天大学李涛采取交流感应措施来控制悬浮体的稳定性[2],但这个方案要达到真正可行需要使用较大功率的交流电,既不安全又耗能大;上海大学的仇志坚等人通过使用霍尔传感器,实时检测悬浮物的位置,并反馈给磁场控制系统来实现调控悬浮物的稳定[3],但是这种方法需要一个系统来进行伺服计算。
在这个问题上,本设计通过利用电机带动以海尔贝克(Halbach)阵列模式[4]排列的永磁体转动在导体板上产生涡流,根据涡流磁悬浮原理产生能自稳定悬浮的结构来解决问题,进而设计出了一种高稳定悬浮的,可在导体轨道上实现按人为规划轨迹运动的可控磁悬浮小车。小车之所以能高稳定悬浮是因为感应磁场与源磁场几乎镜像对称,一直跟随着源磁场变动。
中国科学院电工研究所王厚生[5]也做了相似的研究,他采用电机带动导体板转动的方式来研究涡流悬浮,但由于他的实验装置是将各个部件都固定住的,所以他没有指出电机在悬浮时会旋转的现象,而本设计创新性的提出了在小车上方加上磁轨道来对小车进行磁约束的方法,这个方法不仅能解决反扭矩带来的小车只能旋转前进的问题,而且还是一种新型的磁悬浮方式。
由恩绍定律可知,不能由单一稳定磁场来维持一个稳定的力学结构,即只用一组磁铁而不施加其他外力是无法造出稳定的磁悬浮结构。传统的永磁体悬浮并不能做到完全悬浮,但永磁体本身产生磁场无需耗电且磁场恒定;而涡流悬浮的特点是能自稳定悬浮,但是自稳定悬浮往往需要耗费大量的电能,而本设计将两者结合了起来,既具备了两者的优点同时摒弃了两者的缺点,既做到了使整个悬浮装置能自稳定悬浮,又做到了低成本,低自重,低功耗。
2 装置基本原理
2.1 装置概括
整个装置由小车和导体板轨道及顶部磁轨道组成,小车上有由电机和永磁体阵列组成的悬浮组件和电控电路板及电源,悬浮组件负责提供悬浮动力,电控电路板配合远程遥控实现对小车运动的控制。见图1~3。

图1 小车实物图
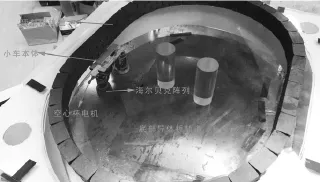
图2 小车轨道实物图

图3 小车设计图
2.2 悬浮基本原理
小车的悬浮主要由永磁体和导体板轨道之间的相互作用起作用,利用快速运动的永磁体阵列让轨道导体与永磁体之间产生相对运动,切割磁感线,导体轨道上产生感应电流,感应电流激发与永磁体阵列中对应磁场镜像对称的感应磁场,继而与永磁体阵列产生排斥力。根据法拉第电磁感应定律有

只要永磁体阵列运动得够快,产生的感应电动势E就足够大,产生的感应磁场就足够强。当轨道导体与永磁体阵列之间的排斥力足够抵消永磁体的重力时,就能实现永磁体的悬浮。
2.3 Halbach磁体阵列
Halbach磁体阵列是一种将径向阵列与切向阵列结合在一起的永磁体排布方式,这种排布方式能用最少的永磁体通过一定的磁化方向排列在磁体阵列的一侧产生单向最强的磁场,其永磁体的利用率非常的高,而且其单边磁场的磁场强度峰值高,能在与轨道导体做相对运动时在轨道导体上产生更大的感应电动势。见图4。

图4 上图表示海尔贝克阵列的磁场分布
经HT20数字特斯拉计测量,由N50钕铁硼(10*10*10mm)组成的单块条状阵列,两极交互排放条状阵列,海尔贝克条状阵列的磁感应强度峰值分别是352mT,378mT,461mT。相对于两极交互排放条状阵列,海尔贝克条状阵列的磁感应强度峰值多了22%。
3 装置系统设计
整个实验装置系统包括悬浮系统,驱动系统,导向系统三个系统。
3.1 悬浮系统设计
悬浮系统由各个悬浮组件和轨道导体组成,每个悬浮组件包括一个电机和一个海尔贝克永磁体阵列。
3.1.1 轨道导体的选择 磁感线在轨道导体上的穿透距离有限且磁感线会随着穿透距离的增加而衰减,以致磁感线在穿透到某一距离之后的磁感应强度所产生的感应电流几乎为0,所以导体板不需要太厚。为了使轨道导体中的感应电流达到最大,优先选择电阻率小的导体板,市面上常见的导电材料有铜和铝,铝成本低廉但导电性欠佳,而铜导电性好但成本颇高。在未超过磁感线穿透距离的前提下,厚铝板可以和薄铜板起到一样的悬浮效果。为了节约成本和减少导体板厚度可以将两者叠起来使用。在超过磁感线穿透距离时,两者的效果一样。
3.1.2 电机的选择 首选具有大扭矩、高转速且重量轻的电机。重量轻更容易实现悬浮;大扭矩能使电机在受到感应磁场的阻力时还能维持当前的转速,实现稳定悬浮高转速能给轨道导体板带来高感应电流,从而产生大斥力。
3.1.3 永磁体阵列设计 在永磁体材质方面,市面上常见的永磁体有铁氧体,钕铁硼,钐钴,铝镍钴等,其中磁性能最优秀的就是钕铁硼了[6],钕铁硼永磁体有着极高的磁能积和矫顽力及高能量密度等优点,能满足本设计悬浮模型高磁场强度峰值的需求。为了达到最明显的效果,本设计选择了牌号为N50的方块钕铁硼磁铁作为永磁体阵列的基体。
为了使同一个轨道导体区域内能一直产生磁通量的变化,本设计应用了环状的Halbach磁体阵列。在其尺寸设计方面,首先应该考虑磁环的直径大小,直径太大,磁环做圆周运动的力臂变长,电机的扭力可能会出现不够的情况;磁环直径太小,一方面是产生磁场作用范围变小,可能产生不了足够的斥力来维持整体的悬浮,另一方面磁环直径过小,在电机扭力足够带动磁环后,可能会出现扭力溢出的情况。
3.2 驱动系统设计
由于完全悬浮的小车只与空气有摩擦,在低速时摩擦可以忽略不计,极小的动力即可驱动小车,所以可在小车上搭载着风力推进电机,通过远程无线电调控风力推进电机来实现小车的驱动。本设计选择了空心杯电机来作为风力推进电机,因为其有着能量转换效率高,能量密度高,质量小,响应迅速,可平稳持续工作的优点。
无线电遥控使用多通道遥控,方便遥控多个风力推进电机及实现风力推进电机的正反转。在实验中发现,小车上存在电磁干扰,干扰源有:永磁体的磁场,电机运转时产生的电火花带来的电磁波,涡流产生的感应磁场,为了解决无线电遥控偶尔失灵的问题,本设计使用了长度偏长的电控板天线,并在电机上并联了消火花电容。
3.3 导向系统的设计
3.3.1 车体结构设计 当单个悬浮组件悬浮时,电机的外壳会逆着永磁体阵列旋转的方向转动,这是因为电机的定子与转子存在相互作用力,而电机又没有被固定住,所以出现了电机外壳旋转的现象。如果不采取措施给予平衡,那么单个悬浮组件的电机外壳必然会受到一个方向的净扭矩,本设计通过让两个相邻的永磁体阵列旋转方向相反这样的布置让相邻悬浮组件的电机外壳所受扭矩相互抵消,从根本上解决了电机外壳的旋转问题。见图5。

图5 左图表示四轴设计各个电机所受阻力方向右图表示二轴设计各个电机所受阻力方向
但与此同时由于永磁体阵列在做围绕电机轴承的圆周运动时感应磁场与源磁场不是完全镜像对称,所以感应磁场会对永磁体阵列产生一个阻碍永磁体阵列转动的反扭矩.当在使用二轴或四轴设计时,如果各个悬浮组件所受的反扭矩大小不同,不能完全抵消,那么就会出现小车整体存在一个净力矩的情况。
实际情况上很难保证各个电机运行时性能一致,分析得出可能有以下三个原因:
a.小车各处的重量不均匀,导致各个电机的输出功率不一致,输出功率直接影响电机转速和扭力,转速和扭力这两个因素不同会导致各个电机受到的反扭矩和浮力不同,本应相同的力不同就会导致四个电机受到的合力指向某个方向;b.各个电机的供电电压不一致,由于使用两个电池组,两个电机组的电压存在着差异,电压的差异会影响转速,转速会间接影响整体的合力方向,分析同上;c.四个电机的性能不一致,由于电机做工问题出现的个别电机转速,扭力偏离正常值,转速,扭力的影响分析同上。
针对原因a的方法是改善工艺,应用轴承,改善小车各处的质量比重,小车目前难以做到质量均衡是因为电机的振动会让固定结构振动并松懈,不得不采用电机架空结构,如果应用轴承,那么就没有电机振动问题了。
针对原因b的方法是改供电方式为集中供电,电池组的供电性能取决于最差的那颗电池,如果将两个电池组拼成一个电池组,那么整个电机组的供电将会变得一致。
针对原因c的方法是换用步进电机,步进电机能精准控制电机的转速,改用步进电机的方法此前已经有先例[7],hyperloop one公司的涡流悬浮实验就是应用了步进电机。
也可以通过加上磁轨道,将小车用磁力作用限制在一定区域内,实现按一定轨迹悬浮运动。
经过综合比较,权衡利弊,最终选用了在小车上加装永磁体,在小车正上方加上与小车顶上极性相反的永磁体轨道的方案,这样不仅能让小车不旋转也为小扭矩电机的使用提供了可能性,因为磁轨道给小车提供了一个向上的拉力,小扭矩电机扭力小,难以在稳定悬浮时克服涡流悬浮时的阻力,而这样的设计被动抬升了悬浮组件的悬浮高度,让感应磁场的磁感应强度处在一个较小的值,从而使海尔贝克阵列受到的反扭矩变小。见图6。
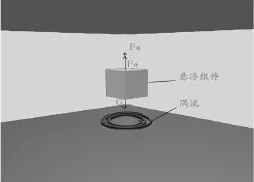
图6 悬浮组件的三力平衡受力图
3.3.2 顶部磁轨道设计 为了使小车能更平稳的悬浮,磁轨道要满足两个条件:(1)要离小车有一定距离,太近了,磁力过强会把小车吸住,太远了,磁力束缚不到小车;(2)磁场作用距离要大,小车悬浮时有一些肉眼难以观察到的振动,当小车所处空间磁场强度变化梯度较大时,小车的振动带来的磁力变化就较大,反之,当小车所处空间磁场磁场强度梯度变化较小时,小车的振动带来的磁力变化就较小,只有磁场作用距离足够大才能在保证在有足够磁力束缚住小车的前提下小车悬浮时的振动对小车的稳定性影响最小。
根据小车处在重力,顶部磁轨道的吸力及轨道导体的斥力三力平衡的状态,不难得到轨道导体板与海尔贝克阵列的距离L1,顶部磁轨道与小车顶部永磁体的距离L2,小车受到的悬浮力F1,顶部磁轨道对小车的吸力F2,小车的重力G这几个量存在以下关系:

在确定小车各处永磁体和自重后,L1与F1之间,L2和F2之间都存在函数关系,在确定函数关系后,又易从实验现象中得知L1,借由(1b)式,可得L2,从而得知顶部磁轨道距离轨道导体的最佳距离。
3.3.3 挡板设计 由于磁轨道拐弯处磁场分布不均,不能很好的束缚住小车,为了避免小车过弯时由于速度过快,受到离心作用而被甩飞,所以在小车一侧加上加上安全滑轮并在小车外围放上挡板,挡板优先选择摩擦系数小的材料作为挡板。
4 磁悬浮小车测试结果
通过观察和测量,小车极限运行速度约为0.5m/s,在3s内能加速到小车的极限速度,如果更换风力推进电机的螺旋桨叶为75mm螺旋桨,小车的极限速度可达1m/s。
小车能完全悬浮,悬浮高度高达11mm,整体重量441g,运行时的最大功率是32w。
磁轨道在弯道处的磁场对小车有加速作用,当驱动风力推进电机给小车一个适当的推力后,不再持续施力,小车能在悬浮状态下一直沿着磁轨道的方向行驶很长一段时间直至小车不能悬浮,此时的行驶速度为约为0.32m/s。
5 产品的应用
该磁悬浮小车的创新点有三:(1)应用了Halbach阵列作为源磁场发生源,在保证了高磁场感应强度峰值的同时降低了永磁体结构的成本;(2)提出了一种新的磁悬浮方式,避免了传统永磁体磁悬浮不能自稳定和涡流悬浮大功耗的问题。(3)易于制作,易于推广,材料易得。
该小车在保证能够自稳定悬浮的同时,通过远程控制实现了对小车的驱动,且该小车载重大、能耗低,成本低。正因为有这些优良的特性,该小车的制造技术应用前景很广泛,例如作为短距离运输的运输工具,或者应用在磁悬浮轴承上[8]等等。如果将其原理应用在房屋结构上还能是房屋防震,在地震到来前通电,使房屋悬浮,避免了房屋倒塌。在此方案的基础上通过进一步选用合适的电机或者自制电机可以达到以更小的功率和转速实现悬浮,也可以通过更换电机里的永磁体来增强电机的性能[9]。小车本身利用电池供电,如果可以利用太阳能板供电的话,该磁悬浮小车将能够实现供电自给自足的最优情况。由于小车的悬浮是基于轨道导体中的感应磁场,如果能利用石墨烯当轨道导体的话,小车的性能将进一步提高。
6 结语
本文进行了基于涡流悬浮原理的可控磁悬浮小车设计,给出了制作小车的详细方案,最终通过做出实物证明了基于涡流悬浮原理的可控磁悬浮小车的方案切实可行,且采用的新型悬浮方式具有能自稳定悬浮,低成本,低自重,低功耗的优点.为涡流悬浮的应用推广提供了有力的支持。
[1]严陆光.关于我国高速磁悬浮列车发展战略的思考.[A]中国科学院院士建议,2002,93(7):1-20;[B]科技导报,2002(11):3-8;[C]中国工程科学,2002,4(12):40-46.
[2]李涛.交流感应磁悬浮技术的研究[D].南京:南京航空航天大学,2013:1-3.
[3]仇志坚,戴军,陈小玲.基于不完全微分PID的斥力型磁悬浮平台控制系统研究[J].微特电机,2014,42(10):75-88.
[4]K.Halbach,Design of Permanent Multipole Magnets with Oriented Rare Earth Cobalt Material,Nuclear lnstr.And Meth.169(1980),1-10.
[5]王厚生.永磁电动式导体板磁悬浮列车轨道结构及相关研究[D].北京:中国科学院电工研究所,2004:21-37.
[6]林河成,我国烧结钕铁硼永磁材料生产应用现状及发展前景[A].稀土.1999,20(6):70-74.
[7]hyperloop-one,https://hyperloop-one.com/,2017.8.25
[8]张士勇,磁悬浮技术的应用现状与展望[D].工业仪表与自动化装置.2003(3):63-65.
[9]董剑宁,黄允凯,金龙,等.高速永磁电机设计与分析技术综述[J].中国电机工程学报,2014,34(27):4640-4653.
