高速高精度无线控制地面有轨运动系统的设计与研究
2018-07-05贺宾岳银鹏韦隆贺艳娜王亚飞
贺宾,岳银鹏,韦隆,贺艳娜,王亚飞
(郑州机械研究所,河南 郑州 450052)
0 引言
基于某所研制的大型户外配套设备[1],建立一个地面有轨运动目标的模拟系统,通过改变目标尺寸规格、运动速度,在不同的模拟背景下可检验探测器对不同目标探测的精度。地面运动装置最大承载迎风面积1×1 m、重量100 kg的模拟目标,以14 m/s速度运动在700 m长环形轨道上高速运行,速度误差小于0.1 m/s,定位误差小于±0.1 m。地面运动装置为模拟目标提供电加热,以便探测器的检测。无线程控系统对运动装置进行远程驾驶,实现运动装置的加速、稳速、变速、制动停止等功能;能够记录试验数据和目标运动装置运行信息及负载信息,并根据需要向控制中心传输有关数据。系统要求速度高、精度高、控制复杂,要实现系统功能要求需解决以下难点问题:①如何研制一套高速运动装置,以实现对模拟目标高速、高精度运动,并对模拟目标提供电加热;②如何研制一套水平度高的环形无缝轨道,为高速高精度运动提供运动基础;③如何在高速、重载荷的条件下,实现对地面运动装置高精度的无线程控。
1 系统结构方案设计
本系统方案包括目标运动装置、环形无缝测试轨道、变轨装置等。系统布局如图1所示。
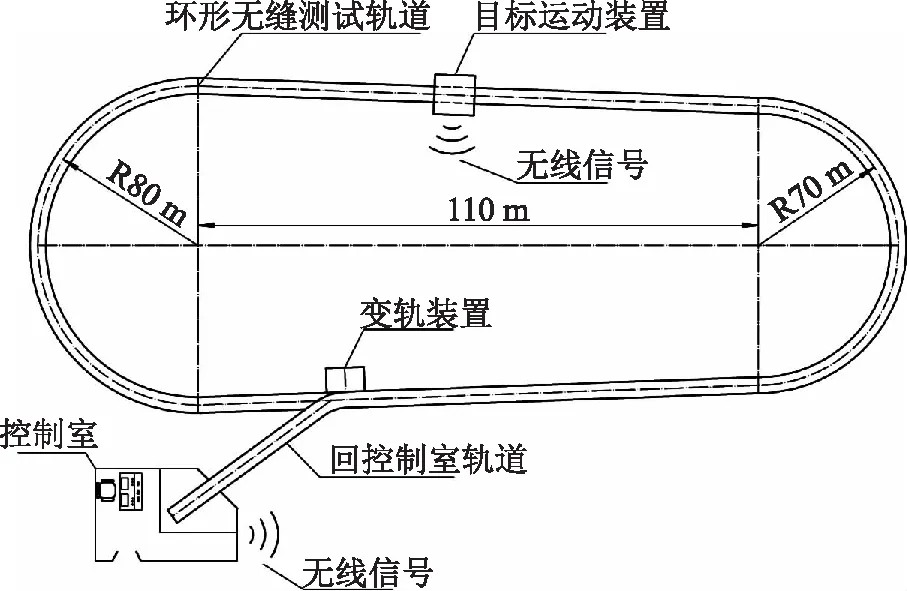
图1 系统布局图
试验时,通过变轨装置将回控制室轨道和环形测试轨道对接,控制目标运动装置驶入测试轨道,再通过变轨装置将测试轨道封闭,测试轨道封闭后,目标运动装置可通过远程控制来实现启动、高速、变速、定位、制动等试验。试验完毕,变轨装置将环形轨道和回控制室轨道对接,目标运动装置驶回控制室,试验完毕。
1.1 目标运动装置
目标运动装置为系统核心装置,承载模拟目标做高速高精度运动,并为模拟目标提供电加热。
目标运动装置采用电动机车形式[2],电动机车由蓄电池供电,动力采用直流伺服,无极变速传动,两轮驱动,具有双向行驶功能。主要包括:直流伺服电机、蓄电池电源系统、车架、聚氨酯行走轮组、制动系统等。
为满足运动装置14 m/s高速高精度行驶,需选用大功率直流伺服电机。电机功率计算[3]为
(1)
式中:M为阻力距,包括风阻距M风、加速阻力距M加和滚动阻力距M滚等,则
M=M风+M加+M滚=C·q·A·R+m·a·R+N·μ·R
(2)
式中:风阻系数C=1,单位面积风压[4]q=0.613v2,运行速度v=14+4 m/s,考虑试验时逆风行驶风速4 m/s(3级风)。迎风面积A=1.2 m2,运动装置及模拟目标总重m=600 kg,加速度a=0.07 m/s2,重力N=6000 N,阻力系数μ=0.1 cm,驱动轮半径R=128 mm。
驱动轮转速n为
(3)
式中:运动装置速度v=14 m/s,驱动轮直径D=256 mm。
综上可得,阻力距M=41.88 Nm,转速n=1044 r/min,电机功率P=4.6 kw。
根据计算结果,直流伺服电机选用科尔摩根AKM82T直流伺服电机,其特点是功率大、转速高、易于维护,配合光电编码器使用,可以达到准确定位以及精确的速度控制。
直流伺服电机、模拟目标加热(48 V)及传感器、制动器等其它弱电信号(24 V)都需要蓄电池电源系统[5]来供电,并配置先进的电池组管理系统。电源系统包括:电池组、电池组管理系统(BMS)、电池充电机及电池组报警与保护模块。其原理如图2所示。

图2 蓄电池电源系统图
蓄电池电源系统的工作原理为,对电池组充电或电池组对外提供输出直流电时,电池管理系统(BMS)实时检测电池组的单体电压、总电流、温度参数,并传输到显示板显示,用户可实时查看电池组信息;继电器开关K及空气开关K1组成电池保护模块,对电池进行过压、过流、欠压、过温及短路保护;充电机可对电池组充电,其充电模式通过CAN总线由BMS进行控制,做到自动充电功能。
目标运动装置行走轮用特制聚氨酯材料,可以缓解高速运行过程中的冲击及振动;在轮轴一端安装制动系统,意外情况发生时可紧急制动。运动装置两端设置轨道刮板,装置运动时可清除轨道上杂物。
1.2 环形无缝测试轨道
测试轨道为环形轨道,由两段各约110 m的直线段和两端半径分别为80 m和70 m的弧组成。
轨道采用单轨,自身结构由钢轨部分和聚氯乙烯部分组成。中部为钢轨,上部、下部为聚氯乙烯材料。
700 m长的钢轨分为若干个2.6 m长的轨道单元,用螺栓连接在基础的钢制预埋板上,通过垫块、垫板调平轨道。钢轨表面先进行喷砂除锈处理,然后进行表面热镀锌工艺处理,以避免轨道长期处于野外露天环境下受户外风雨等因素的影响而受腐蚀。
钢轨单元之间连接有接缝,运动装置经过时会有振动噪音,影响寿命。本方案在钢轨上安装高强度高韧性聚氯乙稀轨道嵌条,聚氯乙稀轨道嵌条为线性制品,截面尺寸稳定性高,可以一次性挤出无限长,避免了由于钢轨接缝产生的振动,从而保证了运动装置在行进中的平稳性,降低了噪声,提高可靠性及使用寿命。
聚氯乙烯轨道嵌条具有强度高、耐磨性好、韧性好、缓冲减震效果好、重量轻、耐光、氧老化、耐水解、耐酸碱腐蚀等优点[6]。
聚氯乙烯轨道嵌条主要原料为聚氯乙烯树脂,通过添加增韧剂、稳定剂、抗氧剂、紫外线吸收剂、紫外线屏蔽剂等功能性助剂,经高速混合挤出造粒成大小均匀、塑化均匀的圆柱形颗粒(半成品),再通过双螺杆挤塑机融熔塑化,经挤出模具挤压型坯,最终经真空定径冷却成型。具体工艺流程如图3所示。
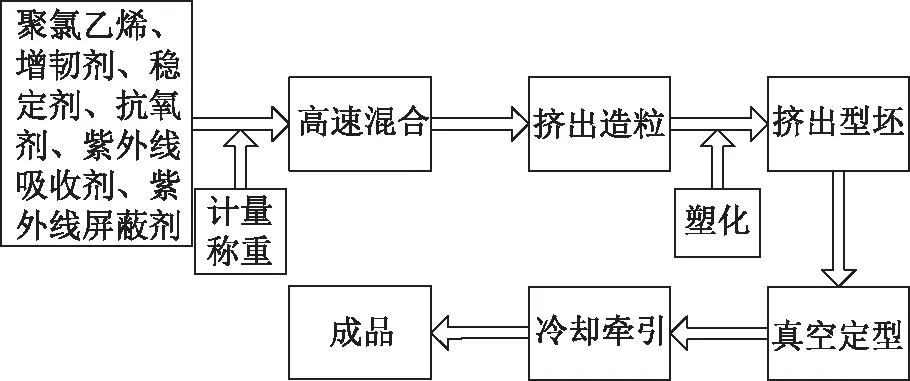
图3 聚氯乙烯制作工艺流程图
1.3 变轨装置
变轨装置可实现通往控制室的轨道与环形测试轨道的连接。
运动装置高速通过环形轨道时有很大离心力,为保证设备运行可靠,运动装置在左右上下都设置了保护轮组,这就导致无法像铁路轨道一样变轨。
本方案将环形测试轨道的一个轨道单元采用弹簧钢,一端固定,另一端连接电动推杆。当需要变轨时,通过电动推杆推动将该轨道单元与通向控制室轨道连接。控制系统可通过传感器反馈信号得知轨道连接位置,确保运动装置正确通过。
2 控制方案设计
2.1 控制系统结构
本系统中目标运动装置与控制室通过无线通讯交换控制信号和状态信息,控制系统按照位置分为控制室部分和目标运动装置部分。
控制室部分主要包括控制计算机、控制盒、无线收发站、电动推杆、接近开关等。
目标运动装置部分主要包括直流电源、PLC、无线收发站、直流伺服驱动器、接近开关等。
综上所述,控制系统组成结构如图4所示,主要包括工作站计算机系统、无线收发系统、电源管理系统、运动控制PLC系统及位置检测系统。
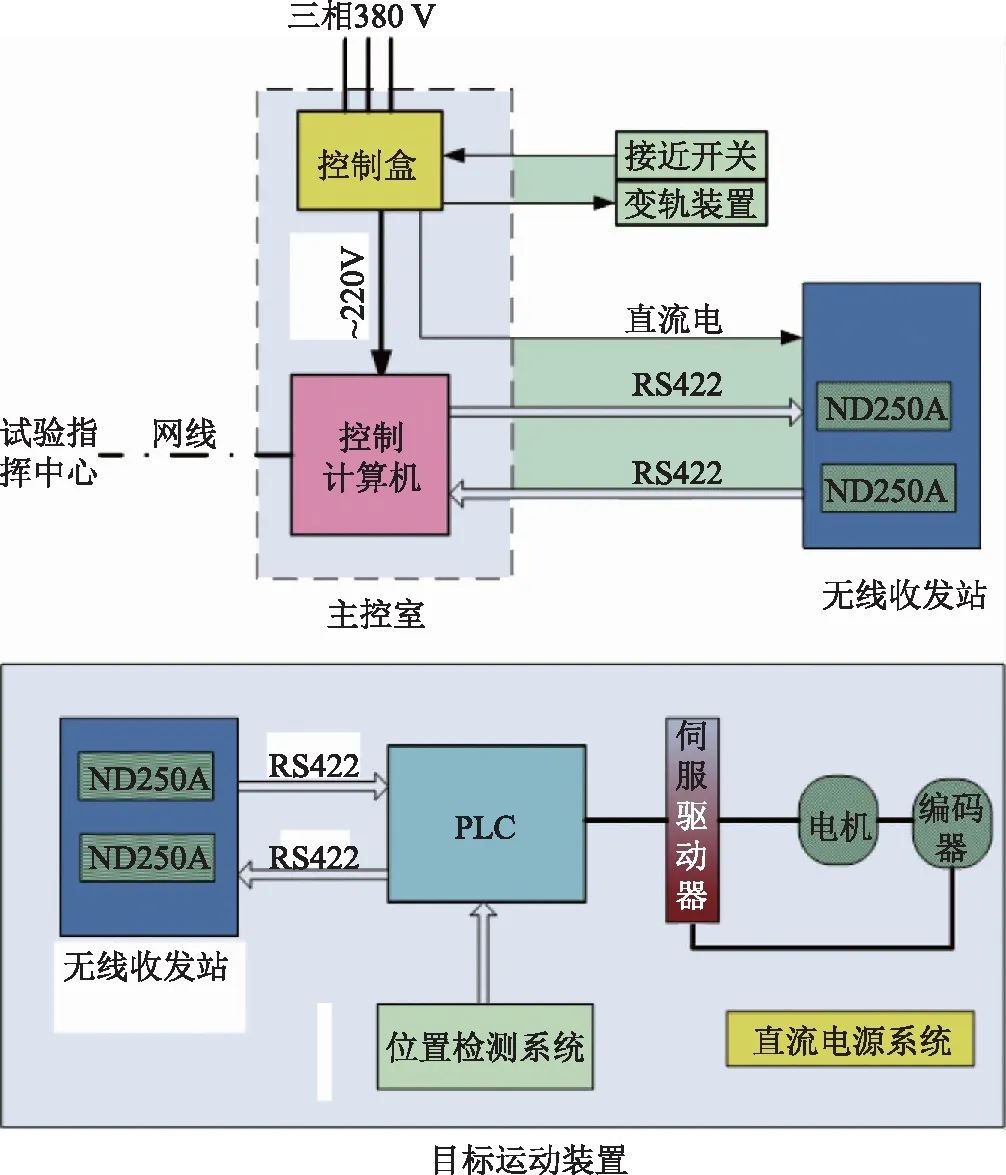
图4 控制系统组成图
工作站计算机通过控制界面可以对运动装置发出指令[7],指令包括运动方式、运动时间和速度等参数的设定,还可以监视目标运动装置的速度、位置以及当前状态。在计算机主控界面上设计仿真模拟图,还可以直接观察到目标运动装置在轨道中的位置。
无线收发系统负责将计算机的指令发送给运动装置并把运动装置的各数据信息系统反馈给控制计算机[8]。无线控制距离远,速度精度高,数据延迟率低于20 ms。本方案采用美国原装进口的工业级无线收发电台MDS9710,其收发速率、控制距离满足本系统要求,另外其电磁兼容性强、适应温度广、功耗低、误码率底、有强大的软件二次开发功能,为实现系统功能提供保障。
运动系统PLC系统采用欧姆龙CP1H系列PLC,用来完成电源系统管理、控制指令的执行、目标运动装置位置及速度数据采集和各种控制输出信号及检测输入信号。其分辨力为1/4000,运动速度精度远远满足指标要求。
2.2 控制流程
操作人员通过计算机上的控制界面发出指令,指令通过无线收发模块传输到达PLC,PLC根据接收到的指令控制目标运动装置做相应的运动。同时PLC将目标运动装置当前的状态、位置、运行速度通过无线收发模块传输到计算机控制界面上,实现对目标的运动控制及监测。计算机还可通过光纤以太网数据传输功能,通过实验站数据采集系统预留的接口向实验指挥中心发送上述信息。

图5 控制流程图
3 关键措施及试验数据
为保证系统实现在轨道上高速、高精度运行,主要采取以下措施:①根据系统速度要求,选取大功率直流伺服电机;②研发高水平度、耐磨性好、缓冲减震效好的特制轨道,保证其运行平稳性;③选用高可靠性无线收发系统及运动控制PLC,实现远距离、高精度控制;④在环形轨道上每间隔50 m安装位置检测及标定传感器,系统经过此位置重新标定位置,消除振动、打滑等因素引起的位置误差,提高运行精度。
采取了各项措施后对系统进行了检测试验,检测方法:在运动装置上安装GPS定位装置,通过系统操作界面设置运动速度,运行距离等,对比设置数据和GPS接收数据值,可评估其速度误差、定位误差。速度误差检测和定位误差检测见表1和表2。

表1 速度误差检测表

表2 定位误差检测表
通过观察表1和表2可知,速度误差满足±0.1 m/s的指标,定位误差小于±0.1 m的指标。最大速度也能达到14 m/s。
4 结语
从动力、结构、材料、控制等方面对一套高速高精度无线控制地面有轨运动目标的模拟系统进行设计及研究,确保模拟系统高速高精度运行,从而可以检验探测器探测不同运动目标的精度,为实验研究提供了可靠的平台,目前该系统已研制成功,并在某光电研究所投入使用。
[1] 李培艳,徐以恒,杜云龙,等.高精度钢丝绳悬挂载荷水平运动系统的设计与研究[J].筑路机械与施工机械化,2014,31(9):90-92.
[2] 王贵明,王金懿,陈捷雷.电动机车辆理论[M].北京:科学出版社,2015.
[3] 成大先.机械设计手册[M].5版.北京:化学工业出版社,2010.
[4] 上海市建设和交通委员会.高耸结构设计规范[M].北京:中国计划出版社,2007.
[5] 黄可龙,王兆翔,刘素琴.锂离子电池原理和关键技术[M].北京:化学工业出版社,2008.
[6] 杨涛.聚氯乙烯配方设计与制品加工[M].北京:化学工业出版社,2011.
[7] 田宇.伺服与运动控制系统设计[M].北京:人民邮电出版社,2010.
[8] 肖景和,赵健.无线电遥控组件及其应用电路[M].北京:人民邮电出版社,2004.
