锥形撒肥圆盘中肥料颗粒运动模型优化与试验
2018-07-05吕金庆李紫辉李季成于佳钰
吕金庆 孙 贺 兑 瀚 李紫辉 李季成 于佳钰
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
中国是马铃薯生产大国,其种植面积约占世界总种植面积的1/4,随着主粮化的推进,种植面积逐年提升,马铃薯精量合理的施肥有利于保护环境,提高肥料利用率,促进马铃薯产量和品质的提升[1-4]。除播种或中耕时的开沟施肥外,抛施肥也是马铃薯施肥的一种有效方式。
目前,国内外主要采用的抛施肥装置为离心式双圆盘撒肥装置,圆盘式撒肥装置又分为水平圆盘和锥形撒肥圆盘,其中锥形撒肥圆盘因具有抛撒幅宽较大的优点而被广泛应用[5-7]。国外对于锥盘式撒肥装置研究较早,相关理论及试验方法较完善[8-10];国内起步较晚,对于撒肥装置的结构设计及理论模型正处于积极的研究阶段,张睿等[11]设计了一种变量施肥抛撒机,采用动态控制的系统进行变量施肥,但在肥料抛撒的运动模型分析中只分析了其离开圆盘的绝对速度,对于撒肥距离和幅宽的理论研究不足;董向前等[12]设计了一种颗粒肥撒施机构,撒肥关键部件采用锥式甩盘,抛撒距离较远,但理论模型的建立停留在二维平面上;胡永光等[13]设计的离心式撒肥装置,适宜小窄行作业而不适宜大垄距的马铃薯施肥作业,且运动模型建立未考虑肥料颗粒的旋转对其在锥形撒肥圆盘上及空气中运动的影响。现阶段,国内对于锥盘式撒肥装置的结构和理论研究较少[14-15],运动模型的建立不符合实际运动情况,造成撒肥装置的结构设计不能达到理想的抛撒幅宽和均匀性,不能进一步指导优化设计。
针对国内在锥形撒肥装置理论研究上存在的不足,本文建立一种锥形撒肥圆盘上的肥料颗粒在抛撒过程中的运动模型,在分析肥料颗粒在锥形撒肥圆盘和空气中的运动时,充分考虑肥料颗粒的旋转性问题,从空间角度合理分析其在空气中的运动特性,以获得较合理的运动轨迹,并通过台架试验,验证结构参数和运动参数对抛撒均匀性的影响,进而获得较理想的抛撒幅宽,提高锥形撒肥圆盘式撒肥装置的撒肥效率,以期为马铃薯撒肥机的研究设计提供理论参考。
1 锥形撒肥装置结构和工作原理
锥盘式撒肥机可抛撒马铃薯及其他作物通用的尿素、磷酸二铵和复合肥料等固体颗粒肥料,如图1所示,主要由肥箱、机架总成、锥形撒肥圆盘、传动系统、搅肥器和肥量调节装置等构成,肥箱安装在机架上部,底部开设有一个落肥口,落肥口处设有肥量调节机构,通过改变落肥口的大小来调节撒肥量,同时在肥箱底部设计有搅肥器,搅拌粘结的肥料,防止堵塞,保证肥料均匀下落。
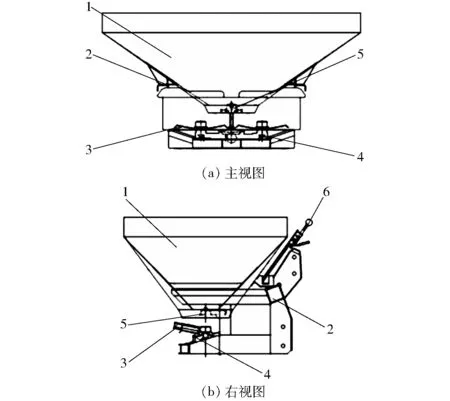
图1 锥盘式撒肥机整体结构简图Fig.1 Structure diagrams of spreader device1.肥箱 2.机架总成 3.锥形撒肥圆盘 4.传动系统 5.搅肥器 6.肥量调节装置
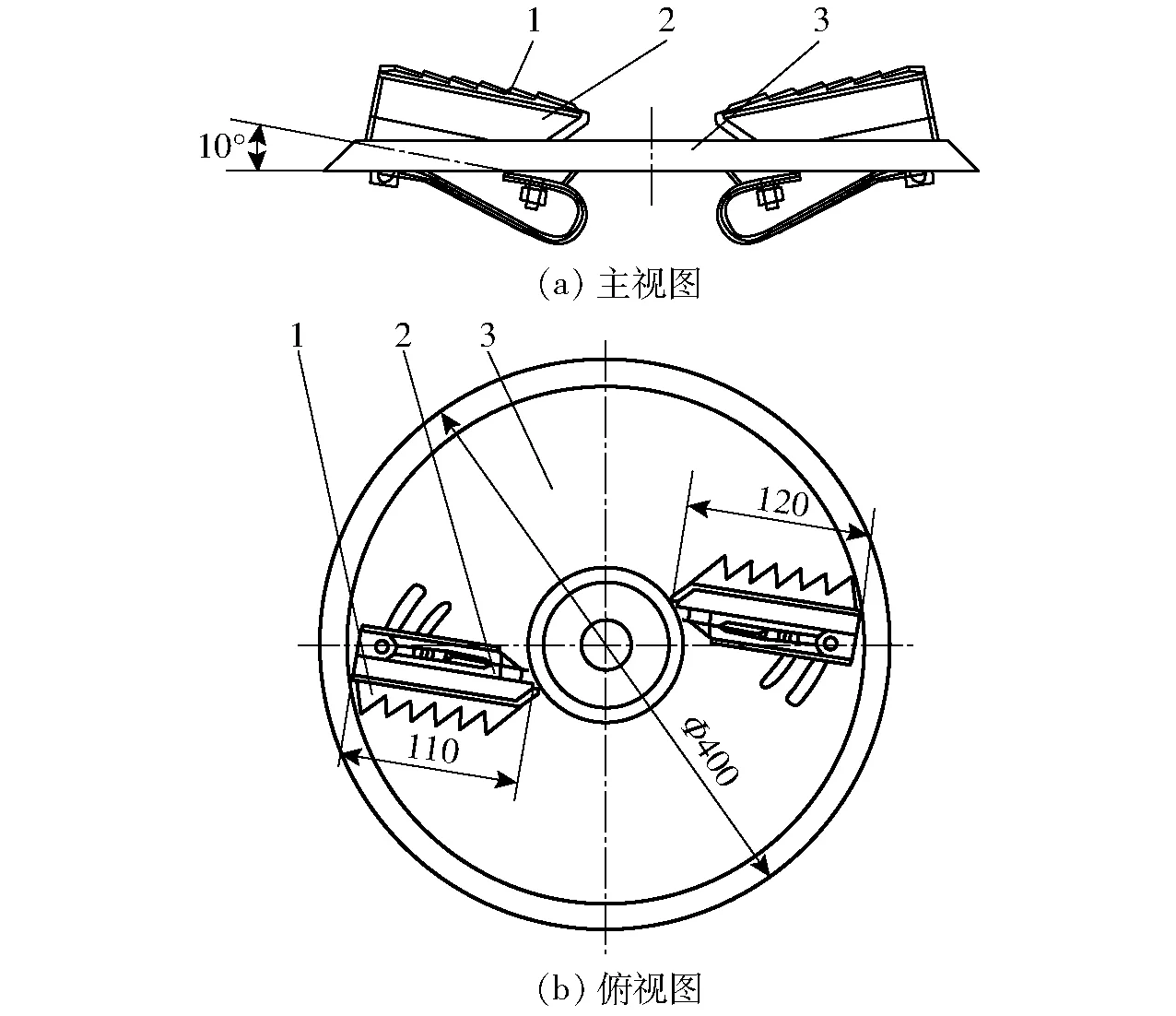
图2 锥形撒肥圆盘装配结构简图Fig.2 Structure diagrams of cone disc assembly1.固定主叶片 2.调节延伸叶片 3.锥形撒肥圆盘
锥形撒肥圆盘是撒肥机的核心部件,安装在肥箱的下方,其具体结构如图2所示,主要包括锥形撒肥圆盘、固定主叶片、调节延伸叶片。撒肥盘上的叶片组数一般为2~4组,本文设计的撒肥装置安装有2组叶片;为保证较大的撒肥作业幅宽,锥形撒肥圆盘锥角设计为10°,锥形撒肥圆盘外边缘直径400 mm;锥形撒肥圆盘上开有长孔,便于安装叶片和根据不同作业要求改变叶片倾角;同时为保证安装及工作性能,增强锥形撒肥圆盘的撒肥幅宽,主固定叶片和调节延伸叶片的长度分别设计为120 mm和110 mm。
锥盘式撒肥装置的工作原理:动力装置驱动锥形撒肥圆盘高速转动,在肥料箱内的肥料颗粒由于重力和上部分肥料压力的共同作用,沿肥箱落肥口处下落至撒肥盘上,高速旋转的圆盘上装有导向叶片,肥料颗粒在摩擦力、离心力等的共同作用下沿叶片被抛撒至田间,完成抛施肥作业。
2 肥料颗粒的运动模型建立
肥料从肥箱落入高速旋转的锥形撒肥圆盘上,随后被抛撒至田间,完成施肥作业。为探究锥形撒肥圆盘对肥料颗粒的抛撒幅宽及抛撒均匀性的影响,建立肥料颗粒运动的解析模型,对整个肥料颗粒的运动过程进行分析,同时将肥料颗粒的旋转考虑在运动中,探究其运动规律。整个运动可分为肥料颗粒在锥形撒肥圆盘上的运动和空气中的运动。
2.1 肥料颗粒在锥形撒肥圆盘上的运动分析

图3 肥料颗粒在锥形撒肥圆盘上的运动模型Fig.3 Fertilizer particles in cone disc motion model1.叶片 2.肥料颗粒 3.锥形撒肥圆盘
建立肥料单颗粒在锥形撒肥圆盘上运动学分析模型,如图3所示。在分析过程中假设肥料颗粒是均匀球形,颗粒与颗粒之间没有相互作用力,不考虑其在锥形撒肥圆盘上和叶片上的弹跳性。以锥形撒肥圆盘中心为坐标原点,分别建立空间动坐标系oijk和oi′j′k′,随锥形撒肥圆盘一起作旋转运动。其中坐标系oijk的k轴垂直于锥形撒肥圆盘表面,i轴沿锥形撒肥圆盘截面方向,坐标系oi′j′k′的k′轴沿锥形撒肥圆盘运动的旋转中心轴线方向,i′轴沿水平方向指向锥形撒肥圆盘外边缘。假设肥料颗粒在锥形撒肥圆盘上滑动,在叶片上纯滚动。在锥形撒肥圆盘上运动将受到重力G、锥形撒肥圆盘旋转产生的离心力Fs、圆盘对其滑动摩擦力fd、圆盘对其支持力N1、叶片对其作用力Ft、叶片对其支持力N2、相对加速度产生的科氏力Fc作用。
沿i轴方向力学平衡方程为
(1)
其中
G=mg
(2)
Fs=mω2i
(3)
fd=μ0(Gcosα+Fssinα)
(4)
式中m——肥料颗粒质量,kg
α——锥形撒肥圆盘锥角,(°)
β——叶片倾角,(°)
g——重力加速度
ω——锥形撒肥圆盘旋转的角速度,rad/s
i——i轴方向的径向位移,m
μ0——锥形撒肥圆盘表面对肥料颗粒的滑动摩擦因数
肥料颗粒在叶片上纯滚动,则颗粒运动的旋转轴为k轴,设其自旋的角速度为ωk,则
(5)
式中r0——肥料颗粒的半径,m
叶片对肥料颗粒的作用力Ft主要由重力沿叶片分力和叶片对颗粒的滚动摩擦力等组成,颗粒所受的摩擦力大小主要由科氏力Fc提供,所以Ft大小是变化的,同时作用力Ft导致肥料颗粒产生旋转,即
(6)
(7)
式中I——颗粒自旋的转动惯量,kg·m2
联立式(5)~(7),可得
(8)
联立式(1)~(4)和式(8),得
(9)
对式(9)的微分方程进行求解,得
(10)
式中C0——常数
对式(10)求导得速度的微分方程
(11)
C0可由初始时刻肥料下落位置距锥形撒肥圆盘旋转中心线的垂直距离求得。将肥料颗粒运动到叶片边缘的速度转换到三维坐标系xyz中,三维坐标xyz的yz平面与水平面平行,则有
(12)
式中γ——肥料颗粒离开叶片时在水平方向上与叶片的夹角,(°)
te——肥料颗粒离开叶片的时间,s
β0——旋转中心和叶片边缘连线与叶片夹角在水平方向的投影,(°)
R——旋转中心距锥形撒肥圆盘边缘的垂直距离,mm
根据坐标系位置关系得
(13)
(14)
将式(13)和式(14)代入式(12)中,得肥料颗粒在叶片边缘的速度
(15)
同理可得运动到叶片外边缘的肥料颗粒的旋转角速度
(16)
由上述分析可知,肥料颗粒在离开叶片时会有沿叶片方向的速度,同时以一定角速度作自旋运动,影响其运动速度及自旋速度大小的主要因素有锥形撒肥圆盘角速度ω、锥形撒肥圆盘的锥角α、叶片倾角β、肥料颗粒在叶片上的运动时间te等,时间te由叶片长度决定。肥料颗粒在锥形撒肥圆盘上的运动会进一步影响其在空气中的运动过程,进而影响其抛撒效果。
2.2 肥料颗粒在空气中的运动分析
通过上述的分析可知,肥料颗粒在离开叶片时具有旋转性,由文献[16]可知,物体在空气中旋转时,引起周围气流变化,根据伯努利原理可知,会产生压力差,产生马格努斯力。马格努斯力会影响肥料颗粒的运动轨迹,进而对抛撒均匀性及抛撒幅宽产生影响。分析肥料颗粒在空气中的运动时,可将其作为自身旋转运动和斜抛运动的合成[17-19],将两种运动分别进行分析,得到其运动轨迹,则实际运动就是两种运动的矢量合成。
2.2.1斜抛运动
肥料颗粒在空气中做斜抛运动,将受到空气阻力Fa[20]、重力G、由于颗粒自旋而产生的马格努斯力Fm的作用,根据牛顿第二定律,得
(17)
(18)
Fm=CmVρa(ω×v)
(19)
式中Ca——空气阻力系数,由空气的雷诺数决定
A——接触面积,m2
ρa——空气密度,kg/m3
v——颗粒运动速度,m/s
V——肥料颗粒的体积,m3
Cm——马格努斯系数
在图3的空间坐标系xyz中,将式(2)、(18)、(19)代入式(17)中可得肥料颗粒的斜抛运动的微分方程
(20)
2.2.2旋转运动
肥料颗粒在空气中做旋转运动,由于空气所产生的阻力矩降低了颗粒旋转的角速度,可得
(21)
(22)
式中Cω——阻力矩系数
Ta——空气产生的阻力矩,N·m
在图3的空间坐标系xyz中,将式(22)代入式(21),得
(23)
由式(20)和式(23)的分析可知,由于肥料颗粒运动的过程是一个连续的过程,肥料颗粒运动速度及自旋速度发生变化,会对肥料颗粒在空气中的运动产生影响,进而对其抛撒的均匀性及抛撒幅宽产生很大影响。肥料颗粒空气中的运动除与空气参数等外界条件相关外,还与肥料颗粒离开叶片时的运动状态相关,由肥料颗粒在锥形撒肥圆盘上的运动分析可知,影响肥料颗粒脱离锥形撒肥圆盘的最终运动状态的因素包括锥形撒肥圆盘角速度、叶片倾角、叶片长度等参数,因此上述因素同样会对抛撒均匀性及抛撒幅宽产生影响。
3 台架试验
3.1 试验条件
2017年10月初在东北农业大学工程学院实验基地(室内)进行了台架试验。试验所用肥料为尿素,根据肥料颗粒物理特性试验,得到尿素颗粒的平均主导粒径为2.41 mm,密度为1 265 kg/m3,本试验所用肥量为5 kg。试验采用静态试验方法[21-23]对颗粒肥料进行收集,收集区域为15.4 m×7 m的矩形区域,在矩形区域内摆放253个收集盒,每列收集盒之间的距离为0.7 m,共摆放23列,每行收集盒之间的距离为0.7 m,共摆放11行,所有地面上的收集盒形成11×23的定点收集矩阵,撒肥装置位于中间列,且距第1行收集盒为1 m,收集盒的整体尺寸为20 cm×20 cm×10 cm。将收集盒摆放完成后,进行二维矩阵收集的静态试验,撒肥试验如图4所示。
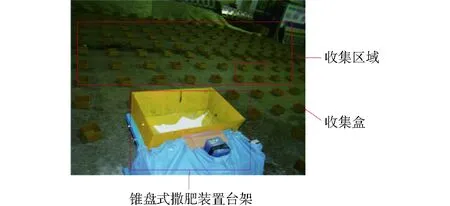
图4 撒肥试验Fig.4 Scattering fertilizer experiment
3.2 试验方法与目的
根据国际标准ISO 5690[24]和美国农业工程师学会标准ASAE S341.2[25]中规定的试验方法,进行静态试验,将每列肥料收集盒中的肥料质量进行叠加,形成1×23的单行肥料收集矩阵,单行矩阵中的肥料质量相当于撒肥装置以一定速度作业时,撒施在单行收集盒后收集到的肥料。以叶片长度、叶片倾角和锥形撒肥圆盘转速为试验因素,撒肥装置的抛撒均匀性是衡量撒肥性能的重要指标,为测定横向撒肥的均匀性,以横向撒肥变异系数CV为试验指标进行正交试验。
撒肥的横向变异系数计算公式为
(24)
其中
式中CV——变异系数,%S——标准差,kg
n——肥料收集盒的列数
mi——第i列肥料收集盒中肥料的质量之和,kg
3.3 试验方案与结果分析
3.3.1试验方案与结果
根据正交试验[26]设计方法安排试验,选取L9(34)正交表安排试验,因素A水平根据延伸叶片可调节极限范围(120~170 mm)选定;根据叶片安装倾角的调节范围为-15°~15°,选定因素B水平;根据实际锥盘式撒肥机的作业转速为900~1 200 r/min,最终确定因素C的3个水平,试验因素与水平如表1所示,试验方案及试验结果如表2所示。A、B、C为因素编码值。
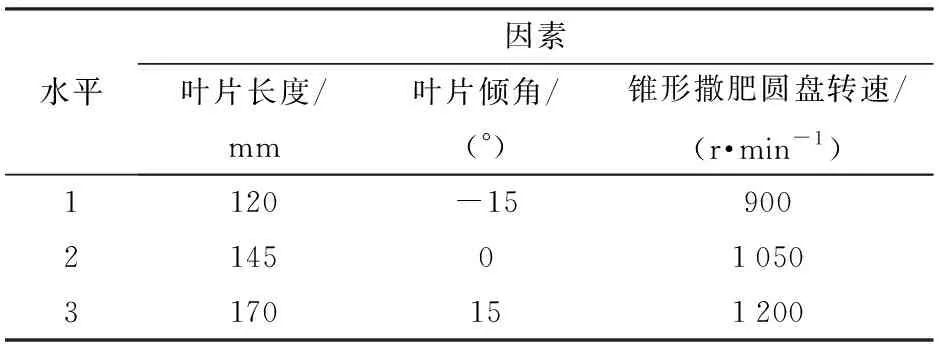
表1 试验因素水平Tab.1 Experimental factors and levels
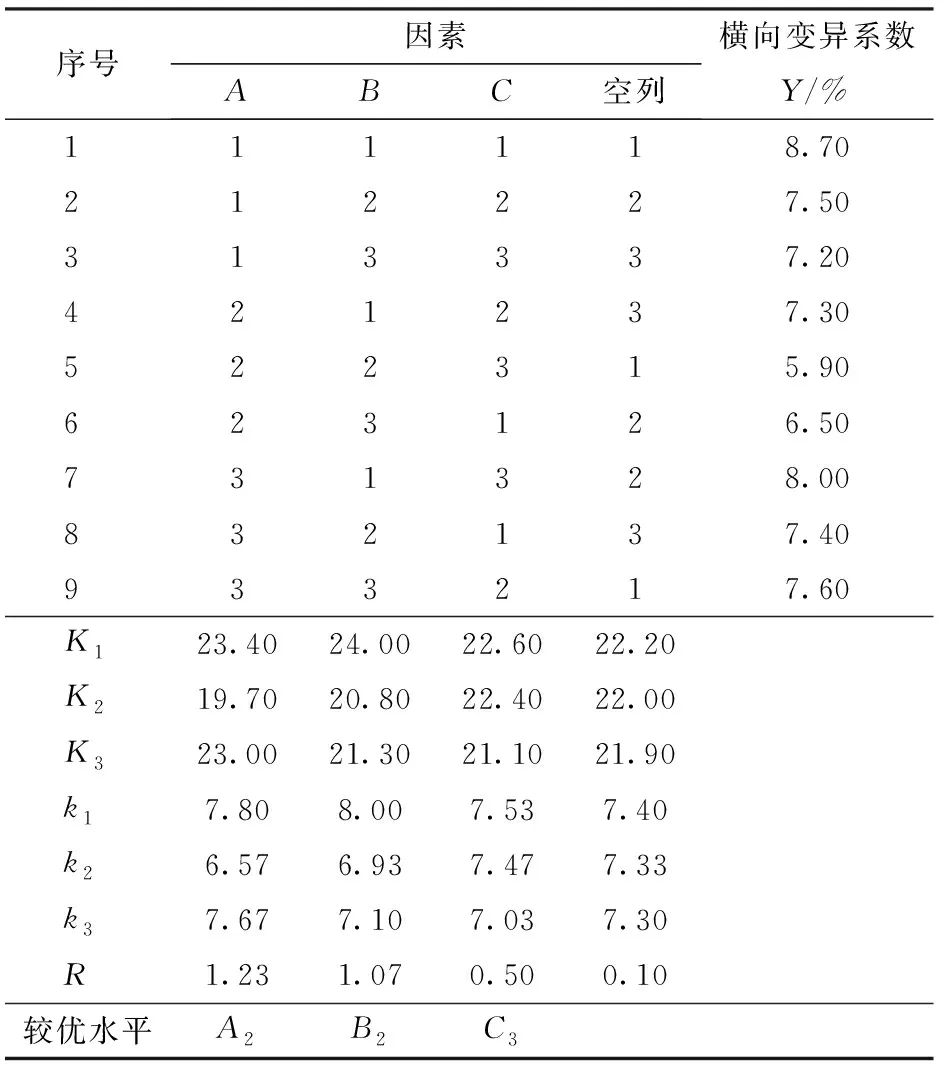
表2 试验方案结果与极差分析Tab.2 Test plan and range analysis of experimental data
3.3.2试验结果分析
极差分析结果如表2所示,较优水平组合为A2B2C3,即叶片长度为145 mm,叶片倾角为0°,锥形撒肥圆盘转速1 200 r/min。
对试验指标横向变异系数进行方差分析,结果如表3所示。由表3可知,对于试验指标横向变异系数因素影响的主次顺序为A、B、C,叶片长度A和叶片倾角B对横向变异系数影响极显著(P<0.01),锥形撒肥圆盘转速C对横向变异系数影响显著(P<0.05)。
3.4 验证试验
3.4.1试验条件与方法
验证试验采用模拟田间的动态试验,试验于2017年11月初,在东北农业大学工程学院实验基地(室外)进行。水泥地面平整无坡度;天气晴,温度为-12~-2℃,空气相对湿度为60%左右,微风,试验所用肥料与室内试验相同。根据优化后的参数进行装置调节,并进行验证试验。
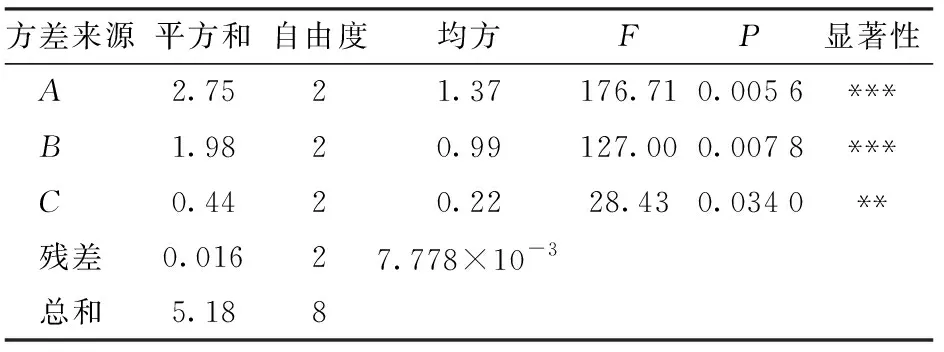
表3 试验结果方差分析Tab.3 Analysis of variance for experiment result
注:*** 表示极显著(P<0.01);** 表示显著(P<0.05)。
肥料收集区域为16.8 m×26.6 m的矩形区域,以初始位置的撒肥盘中心在地面上的投影为坐标原点,垂直方向投影建立如图5所示的OXY二维直角坐标系,其中Y轴方向为撒肥装置的前进方向,X轴方向与Y轴垂直,在矩形区域内摆放260个收集盒,每行每列之间距离为1.4 m,共摆放20行13列,其中,X=±2 m之间区域为拖拉机行驶区域,所有地面上的收集盒形成20×13的收集矩阵,收集盒与室内试验一致。将肥料收集盒摆放完成后,进行室外动态验证试验,如图6所示。
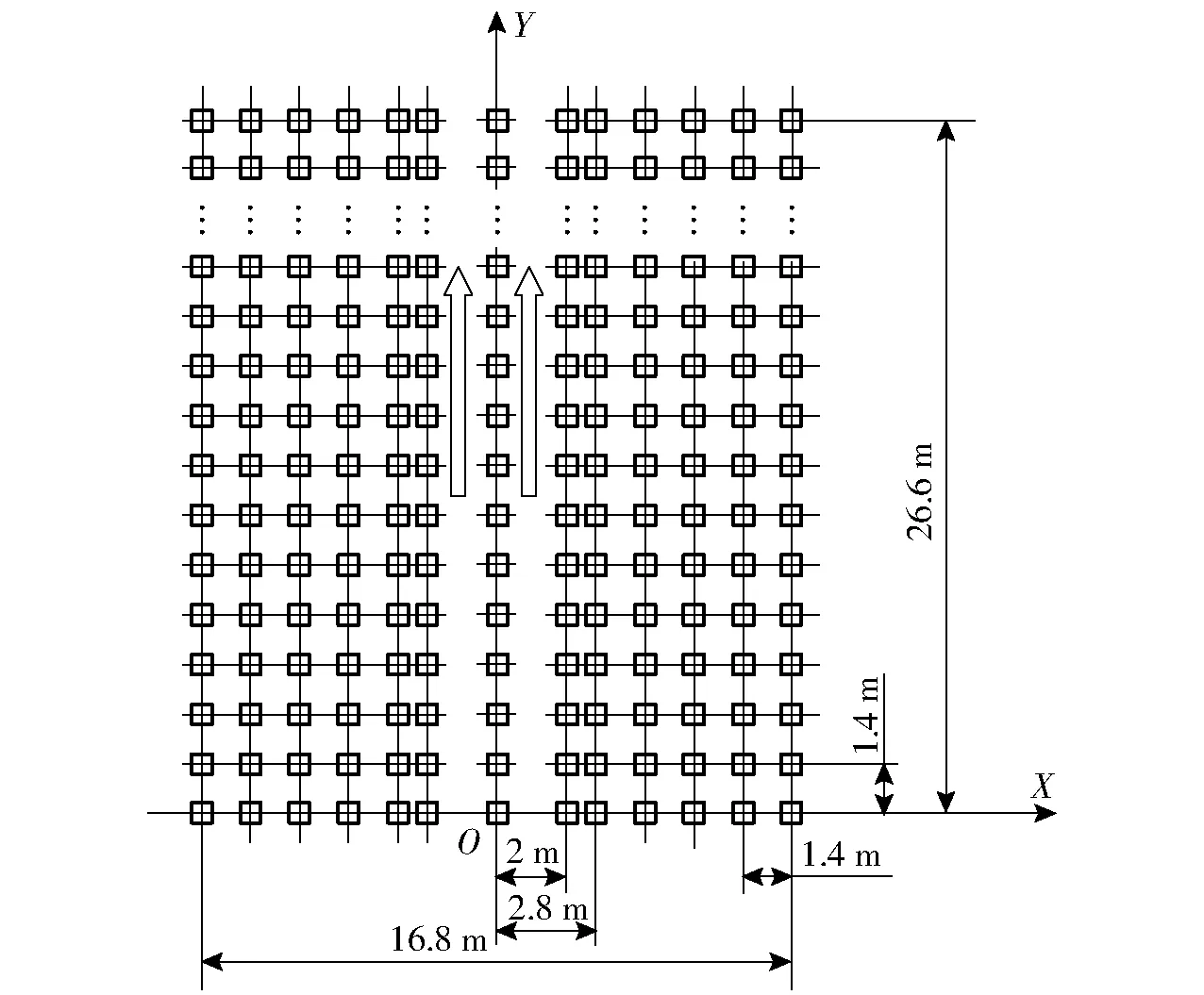
图5 验证试验示意图Fig.5 Schematic diagram of verification experiment

图6 室外验证试验Fig.6 Outdoor verification experiment
3.4.2验证试验结果分析
经动态验证试验,结果表明:经优化调节后的锥盘式撒肥装置抛撒肥的横向变异系数为5.80%,与正交试验中所得结果基本一致,符合圆盘式撒肥机作业时的横向变异系数为5%~10%的要求[27]。同时,与传统锥盘式撒肥装置进行对比[28],优于传统机型的抛撒均匀性测试结果。并对撒肥幅宽进行测定,由图7中可看出,锥盘撒肥装置的有效撒肥幅宽为12.2 m,满足马铃薯施肥作业幅宽要求。
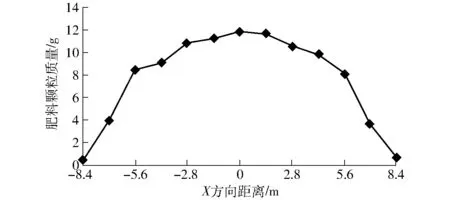
图7 有效撒肥幅宽Fig.7 Effective fertilization width
4 结论
(1)建立的肥料颗粒解析模型分为两部分,锥形撒肥圆盘上的运动模型分析得到影响肥料颗粒在锥形撒肥圆盘上运动的因素为:叶片长度、叶片倾角、锥形撒肥圆盘转速等,同时也对肥料颗粒后续在空气中的运动过程产生影响;空气中的运动模型分析可得肥料颗粒自旋运动影响了其抛撒均匀性及抛撒幅宽,其影响主要因素同样为:叶片长度、叶片倾角、锥形撒肥圆盘转速。
(2)采用正交试验的试验方法进行台架试验,并进行试验结果的极差及方差分析,分析结果得出影响撒肥横向变异系数的因素主次顺序为叶片长度、叶片倾角、锥形撒肥圆盘转速。较优的参数组合为叶片长度为145 mm、叶片倾角为0°、锥形撒肥圆盘转速为1 200 r/min,其横向变异系数为5.80%。对比试验与优化试验结果基本一致,且各项指标均优于行业标准和传统锥盘式撒肥装置。
1 陈萌山,王小虎.中国马铃薯主食产业化发展与展望[J].农业经济问题,2015,36(12):4-11.
2 刘润梅,范茂攀,付云章,等.云南省马铃薯施肥量与化肥偏生产力的关系研究[J].土壤学报,2014,51(4):753-760.
LIU Runmei, FAN Maopan, FU Yunzhang, et al. Relationship between fertilization rate and fertilizer partial factor productivity in potato production in Yunnan province[J]. Acta Pedologica Sinica, 2014, 51(4): 753-760. (in Chinese)
3 刘飞,诸葛玉平,陈增明,等.控释肥对马铃薯产量、氮素利用率及经济效益的影响[J].中国农学通报,2011,27(12):215-219.
LIU Fei, ZHUGE Yuping, CHEN Zengming, et al. Effects of controlled-release fertilizer on potato yield, nitrogen use efficiency and economic benefit[J]. Chinese Agricultural Science Bulletin, 2011, 27(12): 215-219. (in Chinese)
4 付宇超,袁文胜,张文毅,等.我国施肥机械化技术现状及问题分析[J].农机化研究,2017,39(1):251-255.
FU Yuchao, YUAN Wensheng, ZHANG Wenyi, et al. Present situation and problem analysis of the technology of fertilizer mechanization in China[J]. Journal of Agricultural Mechanization Research, 2017,39(1): 251-255. (in Chinese)
5 王元生.基于专利分析的国内撒肥机技术信息研究[J].农业装备与车辆工程,2015,53(11):18-22.
WANG Yuansheng. Study on technology information of domestic fertilizer distributor based on patent analysis[J]. Agricultural Equipment & Vehicle Engineering, 2015, 53(11):18-22. (in Chinese)
6 刘彩玲,黎艳妮,宋建农,等.基于EDEM的离心甩盘撒肥器性能分析与试验[J].农业工程学报,2017,33(14):32-39.
LIU Cailing, LI Yanni, SONG Jiannong, et al. Performance analysis and experiment on fertilizer spreader with centrifugal swing disk based on EDEM[J]. Transactions of the CSAE, 2017, 33(14):32-39. (in Chinese)
7 芦新春,陈书法,杨进,等.宽幅高效离心式双圆盘撒肥机设计与试验[J].农机化研究,2015,37(8):100-103.
LU Xinchun, CHEN Shufa, YANG Jin, et al. Design and experiment on double-disc spreader with wide breadth and highly efficiency[J]. Journal of Agricultural Mechanization Research, 2015, 37(8): 100-103. (in Chinese)
8 王飞.国外撒肥机发展概况[J].农业工程,2016,6(2):31-34,42.
WANG Fei. Development stiuation about spreader at abroad[J]. Agricultural Engineering, 2016, 6(2): 31-34,42. (in Chinese)
9 GRIFT T E, KWEON G, HOFSTEE J W, et al. Dynamic friction coefficient measurement of granular fertiliser particles[J]. Biosystems Engineering, 2006, 95(4): 507-515.
10 VILLETTE S, COINTAULT F, PIRON E. Centrifugal spreading: an analytical model for the motion of fertiliser particles on a spinning disc[J]. Biosystems Engineering, 2005, 92(2): 157-164.
11 张睿,王秀,赵春江,等.链条输送式变量施肥抛撒机的设计与试验[J].农业工程学报,2012,28(6):20-25.
ZHANG Rui, WANG Xiu, ZHAO Chunjiang, et al. Design and experiment of variable rate fertilizer spreader with conveyor chain[J]. Transactions of the CSAE, 2012, 28(6): 20-25. (in Chinese)
12 董向前,宋建农,张军奎,等.锥盘式颗粒肥撒施机构抛撒性能分析与试验[J].农业工程学报,2013,29(19):33-40.
DONG Xiangqian, SONG Jiannong, ZHANG Junkui, et al. Working performance and experiment on granular fertilizer spreader with cone disk[J]. Transactions of the CSAE, 2013, 29(19): 33-40. (in Chinese)
13 胡永光,杨叶成,肖宏儒,等.茶园施肥机离心撒肥过程仿真与参数优化[J/OL].农业机械学报,2016,47(5):77-82.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160511&flag=1.DOI:10.6041/j.issn.1000-1298.2016.05.011.
HU Yongguang, YANG Yecheng, XIAO Hongru, et al. Simulation and parameter optimization of centrifugal fertilizer spreader for tea plants[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 77-82.(in Chinese)
14 张睿,王秀,孟志军,等.肥料抛撒机颗粒肥料抛撒运动分析[J].农机化研究,2012,34(4):54-57.
ZHANG Rui, WANG Xiu, MENG Zhijun, et al. Motion analysis of granular fertilizer spreading in fertilizer spreader[J]. Journal of Agricultural Mechanization Research, 2012,34(4):54-57. (in Chinese)
15 吕金庆,尚琴琴,杨颖,等.锥盘式撒肥装置的性能分析与试验[J].农业工程学报,2016,32(11):16-24.
LÜ Jinqing, SHANG Qinqin, YANG Ying, et al. Performance analysis and experiment on granular fertilizer spreader with swing disk[J]. Transactions of the CSAE, 2016, 32(11): 16-24. (in Chinese)
16 刘万俊.导弹飞行力学[M].西安:西安电子科技大学出版社,2014.
17 王安祥,张晓军,翟学军,等.考虑空气阻力和地球自转的远程抛射体的研究[J].力学与实践,2012,34(4):49-56.
WANG Anxiang, ZHANG Xiaojun, ZHAI Xuejun, et al. Research on a remote projectile considering the air resistance and the earth rotation[J]. Mechanics in Engineering, 2012, 34(4): 49-56.(in Chinese)
18 喻莉,杨植宗,何艳,等.考虑空气阻力的抛体最大射程和最佳抛射角研究[J].空军雷达学院学报,2010,24(6):452-453.
YU Li, YANG Zhizong, HE Yan, et al. Study of maximum range and optimum projection angle of projectile with air resistance[J]. Journal of Air Force Radar Academy, 2010, 24(6): 452-453. (in Chinese)
19 COOL S, PIETERS J, MERTENS K C, et al. A simulation of the influence of spinning on the ballistic flight of spherical fertiliser grains[J]. Computers and Electronics in Agriculture, 2014, 105: 121-131.
20 韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社,2014.
21 中国国家标准化管理委员会.施肥机械试验方法第1部分:全幅宽施肥机:GB/T 20346.1—2006[S].北京:中国标准出版社,2007.
22 王浩宇.水平圆盘式有机肥抛撒部件的试验研究[D].长春:吉林大学,2009.
WANG Haoyu. Research and test on horizontal disc manure spreader part[D]. Changchun: Jilin University, 2009. (in Chinese)
23 JONES J R, HAYDEN L G, YULE I J. A statistical comparison of international fertiliser spreader test methods-confidence in bout width calculations[J]. Powder Technology, 2008, 184(3): 337-351.
24 ISO 5690-2-1984 Equipment for distributing fertilizers—test methods—part2: Fertilizer distributors in lines[S].1984.
25 ASAE S341.2 Procedure for measuring distribution uniform and calibrating granular broadcast spreaders[S]. 1997.
26 潘丽军,陈锦权.试验设计与数据处理[M].南京:东南大学出版社,2008.
27 FULTON J P, SHEARER S A, CHABRA G. Performance assessment and model development of a variable-rate, spinner-disc fertilizer applicator[J]. Transactions of ASAE, 2001, 44(5): 1071-1081.
28 吴辉.圆盘式施肥机抛撒试验系统开发与撒肥规律研究[D].保定:河北农业大学,2007.
WU Hui. Development and distribution study on the spreading test system for a spinner spreader[D]. Baoding: Agricultural University of Hebei, 2007. (in Chinese)
