基于高斯拟合的亚像素边缘检测算法
2018-07-05李煜祺武彦辉中国电子科技集团第二十八研究所江苏南京210007
韩 东 李煜祺 武彦辉(中国电子科技集团第二十八研究所 江苏 南京 210007)
0 引 言
随着机器视觉的发展,配有CCD摄像机的视觉系统被广泛地应用在监视[1]、遥感、测量、质量监控和三维重建等领域。这些领域中的绝大多数应用都需要分析图像中的边缘来获得场景的信息,因此准确地提取图像中的边缘信息对视觉系统功能的实现起着至关重要的作用。传统的边缘检测算法如Canny[2]和Sobel[3]算法只能提供像素级的准确率,这意味着整数像素点之间的边缘信息被遗失了。鉴于这种情况,亚像素的边缘检测算法应运而生。目前,亚像素边缘检测算法主要可以分为三类,即插值法、曲线拟合法和基于矩的边缘检测法。
插值法通过对像素值和梯度进行插值来得到亚像素的精确度[4-6]。通常该类算法采用多项式拟合法来实现插值的计算,但是多项式阶数的选择是一个棘手的问题:用高阶数的多项式拟合会大大降低计算速度,而用低阶的多项式往往达不到精度的要求。另外,这类算法对图像噪声比较敏感,容易得到较差的效果[7]。
曲线拟合方法通过使用已知的边缘模型,将图像梯度数据进行拟合从而获得亚像素精度。例如,Ye等[7]提出了一种使用二维高斯函数作为边缘模型,并通过多维最优化来获得边缘信息的方法;基于双曲切线边缘模型,Nalwa等[8]提出了一种三阶段亚像素边缘提取算法;Su等[9]提出的算法利用抛物线拟合的方法来定位亚像素边缘的位置。这些算法大都能在图像噪声存在的情况下取得较好的效果,但是计算量成为限制其应用的一大瓶颈。
基于矩的亚像素边缘检测算法也比较多的被采用。例如,灰度矩[10]被用来进行阶梯边缘模型的拟合,空间矩[11-12]被用来计算边缘位置的封闭解。这些算法处理无噪声的合成图像可以获得较好的效果,然而如果图像中含有噪声,算法可能会产生较大的误差。基于Zernike矩的边缘提取方法[13-14]虽具有抗噪性能,但是却非常容易错误检测边缘。
为了准确、快速地取得亚像素边缘,我们提出了一种简单却有效的边缘提取算法。算法首先基于模糊边缘模型,利用传统的Canny边缘法提取边缘的粗定位信息,而后使用梯度信息进行一维高斯函数拟合从而得到亚像素边缘信息。一维高斯函数在拟合方面的计算优势和高斯模糊边缘模型的恰当选取共同为算法的高效性、准确性提供了支撑。与传统的边缘检测算法相比,本文算法精确度更高并且运行时间更短。
1 亚像素边缘检测算法
1.1 模糊边缘模型
边缘是图像中灰度值不连续的位置。为了分析边缘信息,学者提出了许多边缘模型,例如阶梯模型、直线模型和T形模型[15]。其中,应用最广泛的是阶梯模型。然而,由于图像的模糊特性(图像生成过程本身会产生模糊效应,另外一种可能是由边缘提取算法中的图像滤波造成的),阶梯模型往往被高斯模型所取代。如边缘剖面图,如图1所示,边缘的灰度值函数是平滑的阶梯函数,其梯度是一个高斯函数。因此,高斯边缘模型可以看作是一个二维的阶梯和高斯函数的卷积[16]。

图1 模糊边缘模型
1.2 亚像素边缘位置计算
本文提出的亚像素边缘检测算法可以分为两步。
1) 算法利用传统的Canny边缘检测算法进行边缘的粗定位。Canny算法先使用高斯滤波对图像进行平滑并计算滤波图像在每个像素点的梯度。而后利用迟滞阈值和非极大值抑制机制获得较纯净的像素级边缘粗定位信息。
2) 获得边缘粗定位信息后,算法使用高斯拟合进一步将像素级定位信息提升为亚像素级。由于图像生成过程具有模糊效应,并且 Canny边缘提取算法对图像也有高斯滤波的操作,因此使用高斯模型进行拟合更适合边缘提取的实际情况。如图 2所示,虚线网格代表图像中的整数像素点,设G为梯度函数,并且坐标系原点与Canny边缘点重合。在梯度方向上,算法通过插值的方法获取2N+1个采样点G(-N)…G(0)…G(+N)。而后利用这2N+1个采样点拟合一维高斯函数,得到的高斯函数中心点的位置就是更新的亚像素边缘点坐标。
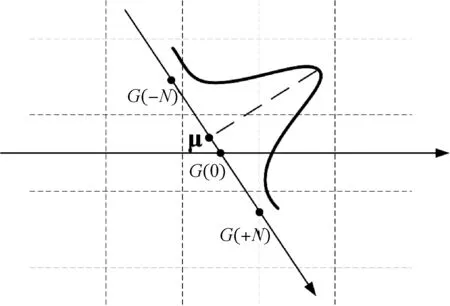
图2 基于高斯拟合的亚像素边缘提取
具体的说,拟合的高斯函数为:
(1)
式中:μ是亚像素边缘坐标;σ是高斯函数的标准差;k表示高斯函数的幅度。
拟合过程使用最小二乘法来求解高斯函数μ、σ、k参数值,其中目标函数为梯度点G(i)和高斯函数预测点N(i)之间的均方误差:
算法利用Levenberg-Marquardt法对上述最优化问题求解,拟合参数初始值设定为k=max{G(i)},σ=2N+1,u=0。
2 实 验
本文使用合成图像和真实图像来检测算法的性能。
2.1 合成图像

图3 合成图像
利用计算机合成技术,生成分辨率为400×300的含有不同程度噪声的边缘图像来验证算法的鲁棒性和准确性。边缘图像生成方法如下。
图像中的直线边缘是根据高斯边缘模型生成。具体地说,假设直线表达式为ax+by+c=0,那么沿着直线法向量方向的灰度分布被设置成高斯函数与阶梯函数的卷积。即图像的灰度分布函数为:
I(x,y)=(lmax-lmin)E(d)+lmin
(2)
实验中所有图像的模糊因子σb都被设定为1.2。为测试提出的算法可以检测不同方向边缘,图像中的直线角度θ被设置为从0到1.5 rad。像素灰度值被归一化到[0,1]区间,lmax=150/255和lmin=50/255,即边缘对比度Ec=100/255。生成的图像中加入了不同等级的高斯随机噪声来测试算法对噪声的鲁棒性。加入的噪声均值为0,标准差σa由噪声比RN来控制:
(3)
在实验中,RN取为1%到20%区间;高斯拟合用的数据点数为11,即N=5。
为评估算法的有效性,实验中用检测到的边缘点与边缘真实位置(直线)之间的距离作为评价标准。从得到的实验数据中看到,由于该距离是带符号的距离,其均值με非常接近0,因此将其标准差σε和边缘直线角度的关系作为评价性能标准,如图 4所示。

图4 亚像素边缘检测距离误差
从图中可以看到,当RN是1%的时候,σε小于0.02像素,体现了算法的准确性;而即使RN是20%的时候,σε也在0.17像素以下,充分证明了算法的鲁棒性。另一方面,σε值在θ变化的时候基本保持稳定,说明算法不依赖于边缘的角度,可以用于提取不同角度的边缘信息。
文本还将实验结果与文献中具有代表性的亚像素边缘提取算法进行了比较。Ye等[7]使用了二维高斯函数进行拟合,是亚像素边缘提取文献记录中实验结果最好的实验之一。为了进行比较实验,本文选取了与文献[7]一致的边缘参数,即σb=1.2,lmax=150/255和lmin=50/255,并选择θ=0.8 的数据与文献[7]中窗口大小为11×11的图像集1的结果进行比较,比较结果见表1。从表1中可以看出本文提出的算法得到的误差均值和标准差都小于文献[7]的结果,证明了本文提出算法的优越性。

表1 亚像素边缘检测比较表
实验中还将提出的算法与Ye[7]算法在运算时间方面进行了比较。在Intel i7-2670-2.2 GHz CPU、4 GB内存的计算机上,利用Matlab2012实现了本文提出的算法,在与上述窗口参数保持一致的条件下,监测到算法平均运行时间为0.093 s,而文献[7]提出的算法的平均运行时间为0.392 s。本文算法的运行时间远小于文献[7],证明了该算法的高效性。
2.2 真实图像
提出的算法在表面光滑物体的三维重建系统得到了较好的应用。该系统利用本文提出的亚像素边缘检测算法获得物体的轮廓,并使用多视角的轮廓作为三维重建的输入,经过摄像机自标定、可视凸壳重建等过程得到物体的三维重建模型。摄像机拍摄到的真实图像(由 Olympus SH-21摄像机采集得到),图像中的前景物体是彩色的,而背景平面是黑白的,因此本文根据RGB空间的彩色图像的转换到HSI空间,并用H通道来进行边缘提取。检测到边缘结果如图 5所示,图中小玩具兔子周边的曲线代表了检测到的亚像素边缘。

图5 真实图像亚像素边缘检测
重建得到的可视凸壳模型见图 6左下角所示,图右下角显示了恢复的12张图像对应的相机姿态。从图中我们可以看到,三维重建模型较好地恢复了物体的形状。三维重建的正确性验证了提出的亚像素边缘检测算法的有效性。
将三维重建系统中的本算法替换为文献[7]的算法,并将得到的三维重建的结果进行比较,见图 7。第一排显示的是使用提出算法的三维重建系统得到的结果,而第二排显示的是使用文献[7]算法得到的结果,可以看到,第一排三维模型比第二排三维模型具有更清晰的轮廓和更细致的细节(如耳朵部分),说明了提出算法的有效性。

图6 基于轮廓的光滑物体三维重建结果
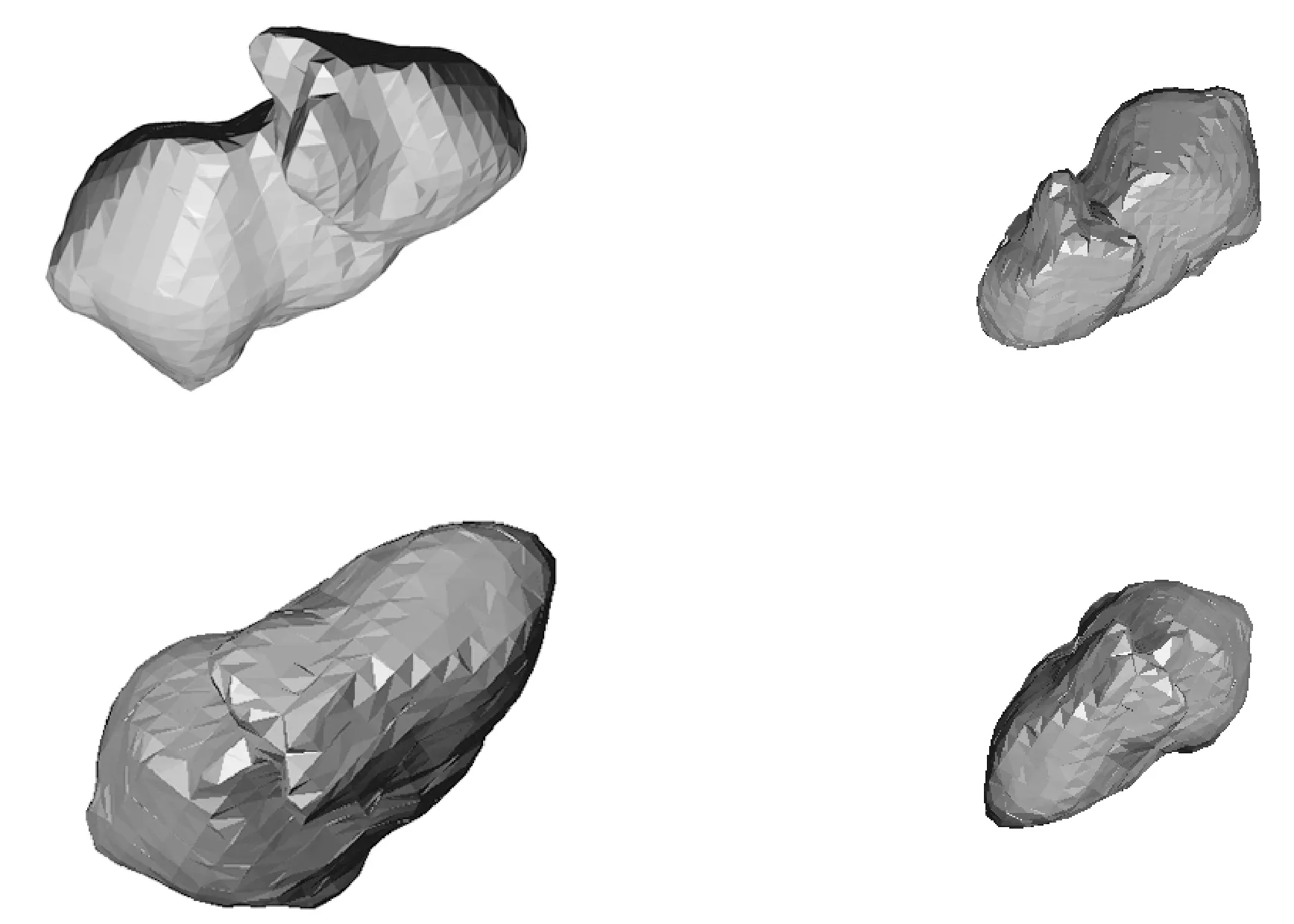
图7 三维重建结果比较
3 结 语
本文提出了一种基于高斯拟合的亚像素边缘检测算法。算法基于图像形成过程中的模糊现象,提出使用高斯拟合的方式来提取亚像素精度的边缘信息。与传统算法比较具有高准确度和计算量小的优势。该算法可以使用在精密测量、三维重建等应用场景下,可以获得精度较高的边缘定位信息。
[1] 吴宣康,徐祥鹏,基于Mean-Shift算法的道路车辆跟踪[J].指挥信息系统与技术,2016,7(3):86- 90.
[2] Canny J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986,8(6):679- 698.
[3] Gonzalez R C,Woods R E.Digital Image Processing[M].3rd ed.Prentice-Hall,Inc.,Upper Saddle River,NJ,USA,2006.
[4] Overington I, Greenway P. Practical first-difference edge detection with subpixel accuracy[J]. Image & Vision Computing, 1987,5(3):217- 224.
[5] Steger C. Subpixel-precise extraction of lines and edges[C]// XIXth ISPRS Congress, 2000,33:141- 156.
[6] Tabbone S, Ziou D. Subpixel positioning of edges for first and second order operators[C]// Iapr International Conference on Pattern Recognition. Vol. Iii. Conference C: Image, Speech and Signal Analysis. IEEE, 1992:655- 658.
[7] Ye J, Fu G, Poudel U P. High-accuracy edge detection with Blurred Edge Model[J]. Image & Vision Computing, 2005,23(5):453- 467.
[8] Nalwa V, Binford T. On detecting edges[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986,8(6):699- 714.
[9] Su C Y, Yu L A, Chen N K. Effective subpixel edge detection for LED probes[C]// IEEE International Conference on Systems, Man, and Cybernetics. IEEE, 2017:379- 382.
[10] Tabatabai A J, Mitchell O R. Edge location to subpixel values in digital imagery[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1984,6(2):188- 201.
[11] Lyvers E P, Mitchell O R, Akey M L, et al. Subpixel Measurements Using a Moment-Based Edge Operator[J]. Pattern Analysis & Machine Intelligence IEEE Transactions on, 1989,11(12):1293- 1309.
[12] Shan Y, Boon G. Sub-pixel location of edges with non-uniform blurring: a finite closed-form approach[J]. Image and Vision Computing, 2000, 18(13):1015- 1023.
[13] Yu W, Ma Y, Wu X, et al. Research of improved subpixel edge detection algorithm using Zernike moments[C]// Chinese Automation Congress. IEEE, 2016:712- 716.
[14] Xiang F, Wang Z, Yuan X. Subpixel Edge Detection: An Improved Zernike Orthogonal Moments Method[C]// International Conference on Intelligent Human-Machine Systems and Cybernetics. IEEE, 2013:19- 22.
[15] Ziou D, Tabbone S, Ziou D. Edge Detection Techniques-An Overview[J]. International Journal of Pattern Recognition & Image Analysis, 1998,8(4):537- 559.
[16] Elder J H, Zucker S W. Local Scale Control for Edge Detection and Blur Estimation[J]. IEEE Trans Pattern Analysis & Machine Intelligence, 1998,20(7):699- 716.
