皮卡车主动悬架防侧翻控制策略研究*
2018-07-04李胜琴刘轩龄冯新园
李胜琴 刘轩龄 冯新园
(东北林业大学交通学院 哈尔滨 150040)
0 引 言
皮卡等小型货车由于质心位置比较高,车身宽度相对小,当路面条件发生突变或者驾驶员紧急操作时,容易发生侧向失稳,严重失稳时则会发生侧翻事故,不仅会对车内乘员的人身安全造成危害,还会对交通环境产生影响[1-2],因此,有必要针对皮卡车的结构及工作特点,基于其自身系统,进行辆的抗侧翻稳定性研究.
Nam等[3]提出通过控制轮胎侧向力,实现对车辆侧翻力矩的控制,通过传感器获得轮胎侧向力与侧倾角的信号,当实际数值超过侧翻阈值时,侧翻力矩控制器开始工作.国内对车辆主动防侧翻控制技术的研究主要集中在差动制动、主动转向等单一控制方式,Zong等[4]提出了利用差动制动的控制方法,对重型半挂车进行多个目标的控制,对车辆的横摆、折叠等采用LRQ最优控制加以控制,最终表明该算法能够大幅度减小侧翻的发生.文献[5-7]进行了利用主动转向系统对车辆施加横摆力矩实现防侧翻控制技术的研究.
由于悬架系统能够调整车轮垂向附着力及车身姿态,因而可以采取某种控制措施,及时调整即将发生侧翻车辆的车身姿态,以维持车辆侧倾稳定性.Yim等[8]提出差动制动与主动悬架系统联合控制车辆的质心高度和行驶速度,采用二次线性最优控制方法控制半主动悬架及控制附加横摆力矩的两个模糊控制器,进而实现车辆侧倾稳定性控制.仿真结果表明,该控制策略能有效防止车辆发生侧翻.廖聪等[9]设计出基于主动悬架的H∞控制策略,结果显示,所提出的控制策略,能够可靠地减小车辆在沿曲线运行过程中的侧向转动,提升了车辆的稳定性,减小侧翻发生的几率.严钟辉等[10]通过对1/2车辆悬架动力学分析,构建主动悬架集成控制系统,以增强车辆在高附着道路上高速转向时的防侧翻性能,并且该系统具有良好的路径追随控制能力.
本文针对皮卡车的结构及运行特点,建立车辆侧翻模型,进行主动悬架防侧翻控制策略研究,以增强皮卡车的抗侧翻能力,降低侧翻的发生几率.
1 车辆侧翻模型
1.1 参数化建模
利用CarSim软件建立包含制动、转向、悬架等子系统的整车参数化模型.选用车型基本参数见表1.建立皮卡车的参数化模型,见图1.

表1 车型基本参数
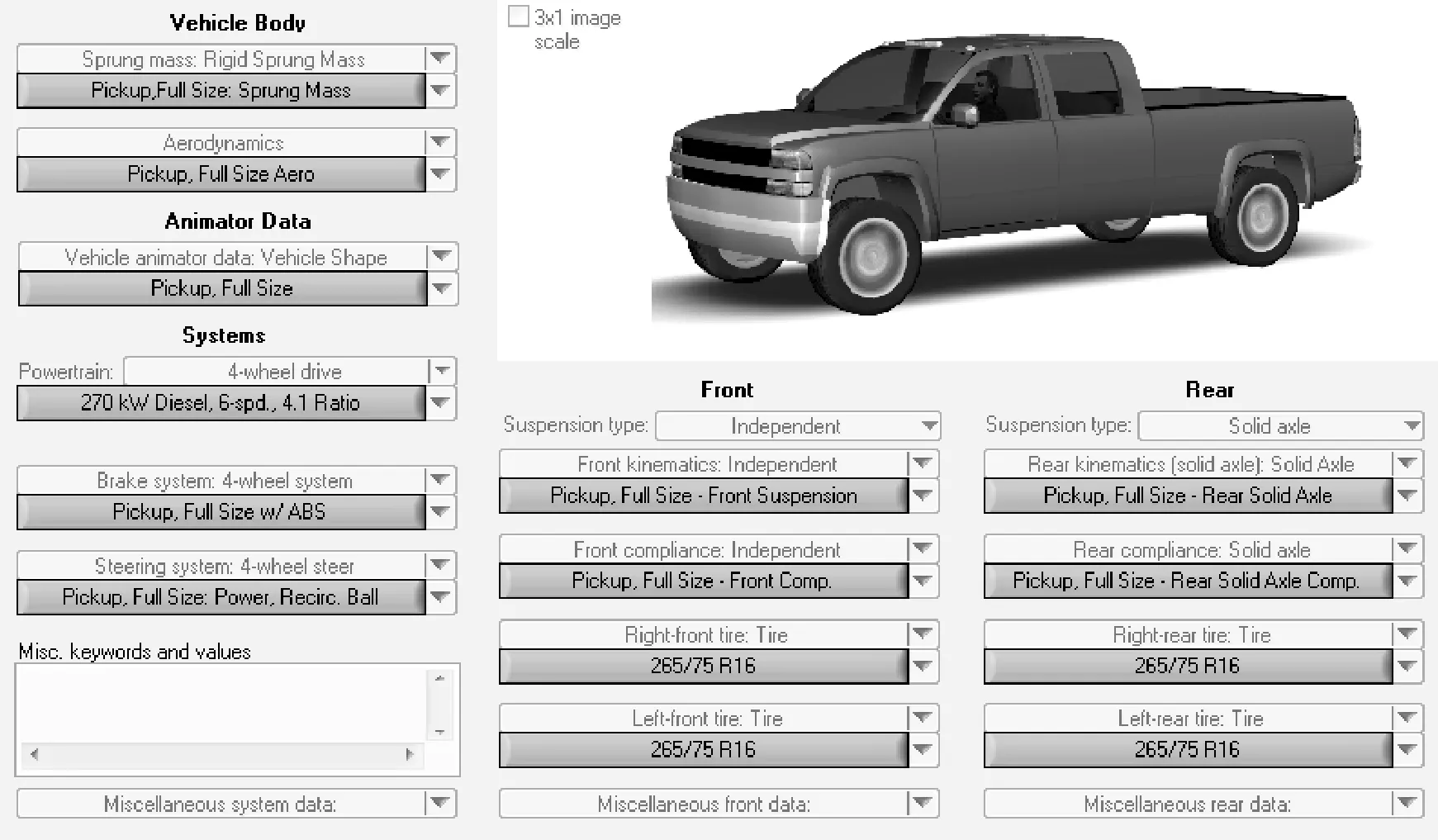
图1 CarSim整车模型
1.2 车辆侧翻性能指标
车辆侧翻性能指标可用于判断车辆是否即将发生侧翻,这些指标也可作为激活控制器的重要依据.本文将选取横向载荷转移率(LTR)作为判断车辆是否有发生侧翻可能的指标.车辆横向载荷转移率是指车辆的左、右车轮垂直载荷之差与其之和的比值,定义为车辆横向载荷转移率,其表达式为
(1)
式中:FL为车辆左侧前后车轮垂直载荷之和;FR为车辆右侧前后车轮垂直载荷之和.
在行驶过程中,车辆有一侧车轮抬起,该侧的车轮垂直载荷变为零,即发生侧翻.假设车辆载荷对称,可得LTR∈[1,1].当车辆直线平稳行驶时,左右车轮载荷相等,即LTR为0;当LTR大于0时,说明车辆在发生向左侧的侧倾;反之,则说明车辆在发生向右侧的侧倾.
本文取LTR绝对值为0.8作为侧翻阈值.当LTR值大于0.8或者小于-0.8时,即LTR的绝对值超过0.8时,防侧翻控制系统将判定车辆即将要发生侧翻,需要激活控制器开始工作.
2 主动防侧翻控制策略
本文利用悬架控制策略,通过两侧悬架纵向主动控制力的差动输入,调节悬架工作状态,进而调整车身姿态,从而避免车辆侧翻.
2.1 控制系统的设计
控制系统旨在为运行过程中的车辆减小并抑制侧翻的发生,所以需要采集车辆在运行过程中的状态数据,根据实时数据进行计算,从而判断是否激活主动防侧翻控制系统,控制系统示意图见图2.

图2 控制系统示意图
首先利用CarSim模型输出各个车轮的垂向力、侧向加速度和车身侧倾角等车辆运行过程中的实时状态参数值,计算出车辆的实时LTR值,并根据LTR的数值判断是否需要激活控制器开始工作.当控制系统被激活时,控制器向CarSim车辆模型中输入适当的主动悬架控制力,通过调节悬架的工作状态,以矫正车身侧倾姿态,从而减小侧翻的趋势,并在新的状态下再次采集车辆运行状态数据计算LTR,判断是否继续向主动悬架施加控制,直至LTR数值调整到±0.8之内,从而实现系统的实时反馈控制.
2.2 PID控制器的设计
常规 PID 控制器结构简单,在工程中得到了普遍的应用.本文的PID控制原理见图3.

图3 PID控制原理
本文所设计的控制系统最理想的目标是使得LTR值为零,因此将r(t)设为0,实际的CarSim模型输出的LTR值设为y(t),两者相减得到的偏差e(t)作为控制器的输入量,经过PID控制器之后,即可得到输出量u(t),即被控对象的悬架主动控制力.
2.3 模糊控制器设计
模糊控制器的原理见图4,采用与上述相同的方法取得误差e,误差e和误差的变化率ec经过模糊化后转换到模糊论域中.
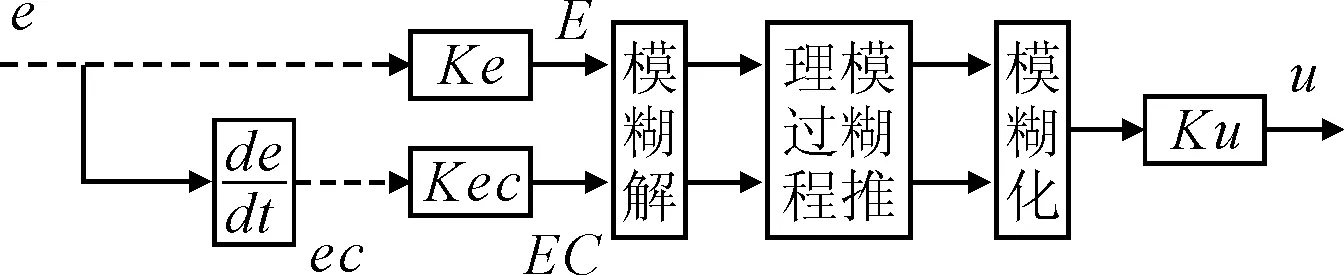
图4 模糊控制器的原理图
其隶属度函数见图5~6,转化后对应到模糊论域中语言变量分别为E和EC.

图5 输入变量E的隶属函数

图6 输入变量EC的隶属函数
经过模糊规则推理以及解模糊后可得控制输出u,模糊论域中对应U,输出变量隶属度函数见图7.

图7 输出变量U的隶属函数
设定e的基本论域为[-e,e],ec的基本论域设定为[-ec,ec],设定被控对象的基本论域为[-u,u].对应的模糊子集分别为
误差E: {NB,NM,NS,NO,PO,PS,PM,PB};
误差变化率EC: {NB,NM,NS,ZO,PS,PM,PB};
控制输出量U: {NB,NM,NS,ZO,PS,PM,PB}.
由此,根据工程经验见表2模糊控制规则表.根据表2所设计的模糊控制规则,在Matlab的FIS编辑器中对模糊规则进行编辑.

表2 模糊控制规则表
3 主动防侧翻控制策略的验证
3.1 联合仿真模型的建立
在Simulink环境下建立车辆控制联合仿真模型,见图8.输入量包括左前、左后、右前、右后悬架的主动控制力.输出量包括左前、左后、右前、右后轮胎的垂直载荷、侧向加速度、质心侧偏角、横摆角速度、车身侧倾角.
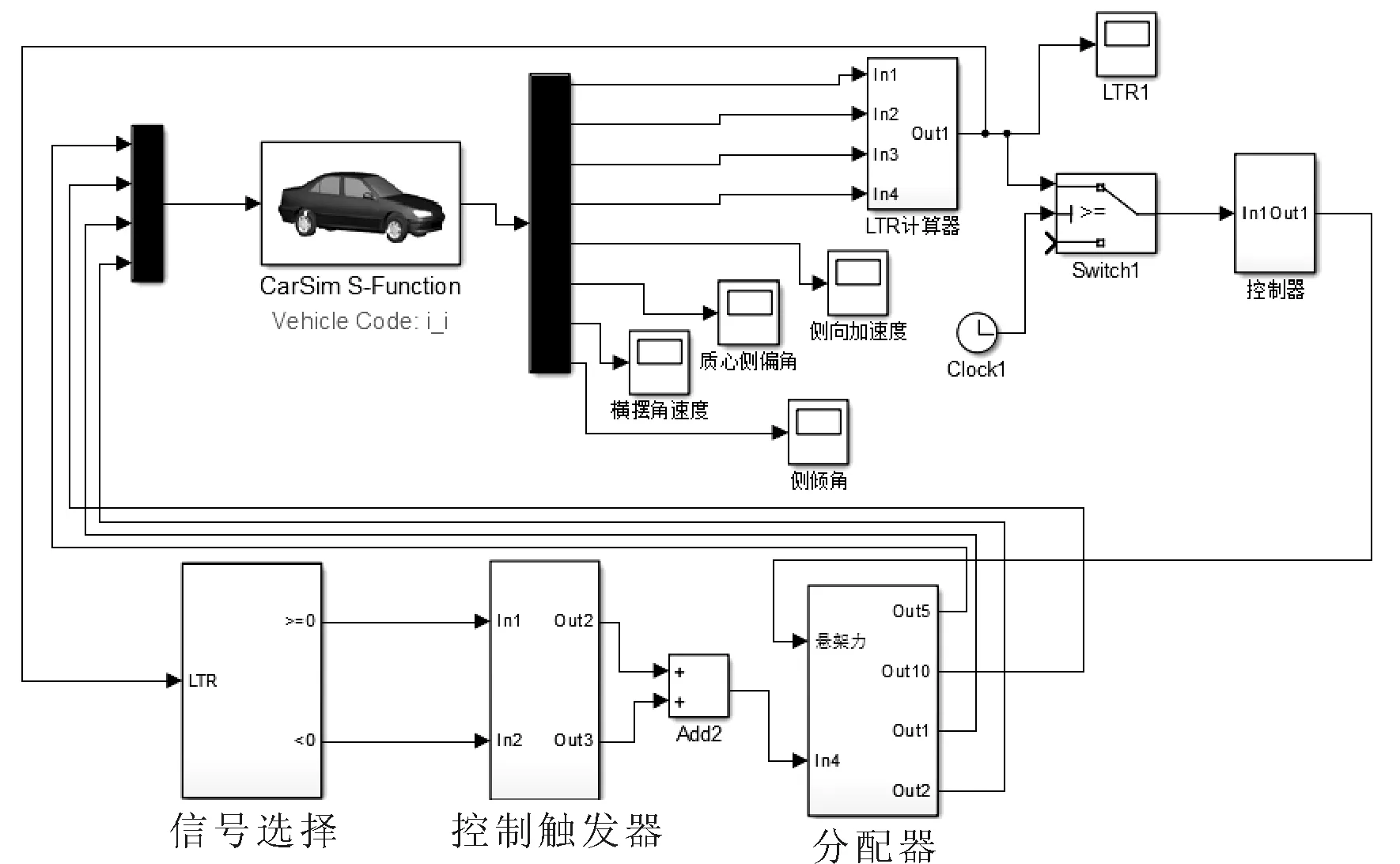
图8 联合仿真模型
其中,分配器子系统见图9,其作用为根据先前信号选择器和激活器的判断,将相应的悬架主动控制力输入给相对应的悬架,即当LTR大于0.8时,将控制器产生的悬架力输入给左侧悬架正方向的控制力,当LTR小于-0.8时,将控制器产生的悬架力输入给右侧悬架正方向的控制力.
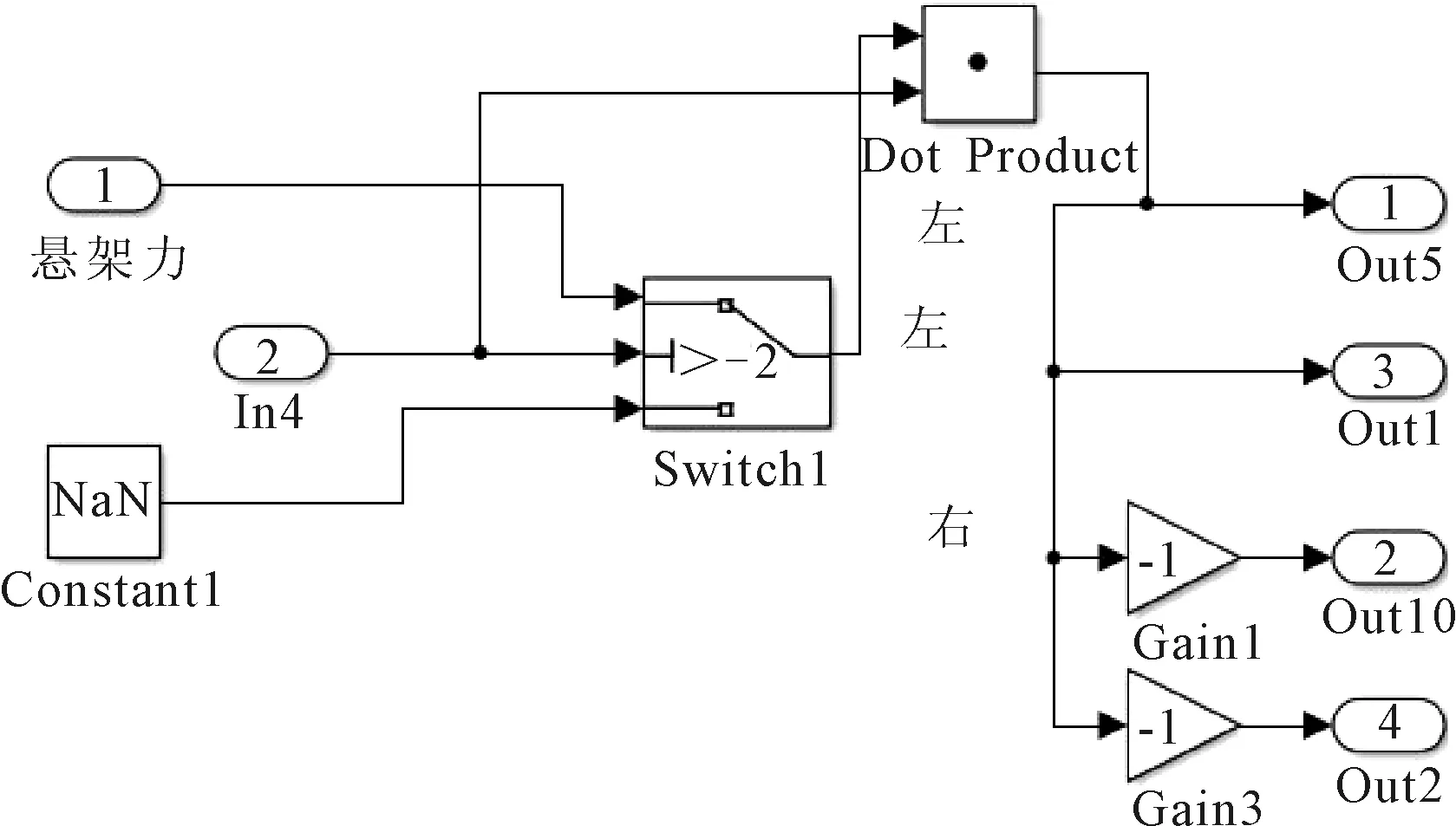
图9 分配器子系统
控制器子系统分别为本文设计的PID控制器与模糊控制器,见图10.
图10 控制器子系统
3.2 鱼钩试验工况的控制策略验证
设定路面附着系数为0.85,车辆以80 km/h的初始速度行驶,鱼钩试验工况的转向盘转角设置见图11a),转向盘输入的最大值设置为300°.在鱼钩工况下,车辆在无控制、模糊控制、PID控制情况下的各性能指标的仿真结果对比曲线见图11b).

图11 鱼钩试验转向盘转角输入和LTR对比图
由图11b)可知,无控制时车辆LTR的绝对值最高值已经超过侧翻阈值0.8,可认定车辆即将发生侧翻.当施加控制时,LTR绝对值维持在0.8以内,没有超过侧翻阈值.图12a)为鱼钩试验过程中车身侧倾角的对比图,由图12a)可知,车辆在无控制的情况下,车身侧倾角最大值达到6°左右.而在施加控制后,车辆侧倾角的极值明显小于无控制时,最终都稳定在4°左右.图12b)为鱼钩试验车身侧向加速度对比图,由图12b)可知,本文所设计的两种控制器都可以起到降低车辆的侧向加速度的作用,PID控制在1.8 s左右开始降低侧向加速度的最大偏差,并在3.2 s处率先控制车辆进入到稳定状态,与无控制相比,过渡时间有明显的减小.模糊控制的效果没有PID控制效果好,但也可以更快地进入到稳定状态.

图12 鱼钩试验车身侧倾角和侧向加速度对比图
3.3 双移线试验工况的控制策略验证
设定路面附着系数为0.85,车辆以120 km/h的初始速度进行仿真试验,双移线实验的转向盘转角设置见图13a).车辆在无控制、PID控制、模糊控制情况下的各性能指标的仿真结果对比曲线见图13b)和图14.

图13 双移线工况转向盘转角和LTR对比图
由图13b)可知,未施加控制时,LTR大约在3.3 s时超过了侧翻阈值,车辆处于比较危险的状态下,而施加控制后,LTR没有超过本文设定的侧翻阈值.其中,PID控制的效果更加明显.
图14a)为双移线工况下车辆侧倾角变化图,由图14a)可知,两种控制方法都起到一定的矫正车身姿态的效果,大约在施加控制3.3 s后,控制器开始发挥作用,曲线波动幅度减小,最终将侧倾角控制的4°以内.其中,PID控制效果优于模糊控制.图14b)为双移线试验的侧向加速度对比曲线.在3.3 s左右控制器开始发挥作用,侧向加速度的波动范围开始缩小,PID控制效果更加明显,将侧向加速度稳定在0.8g以内,模糊控制的振荡量相比较大.
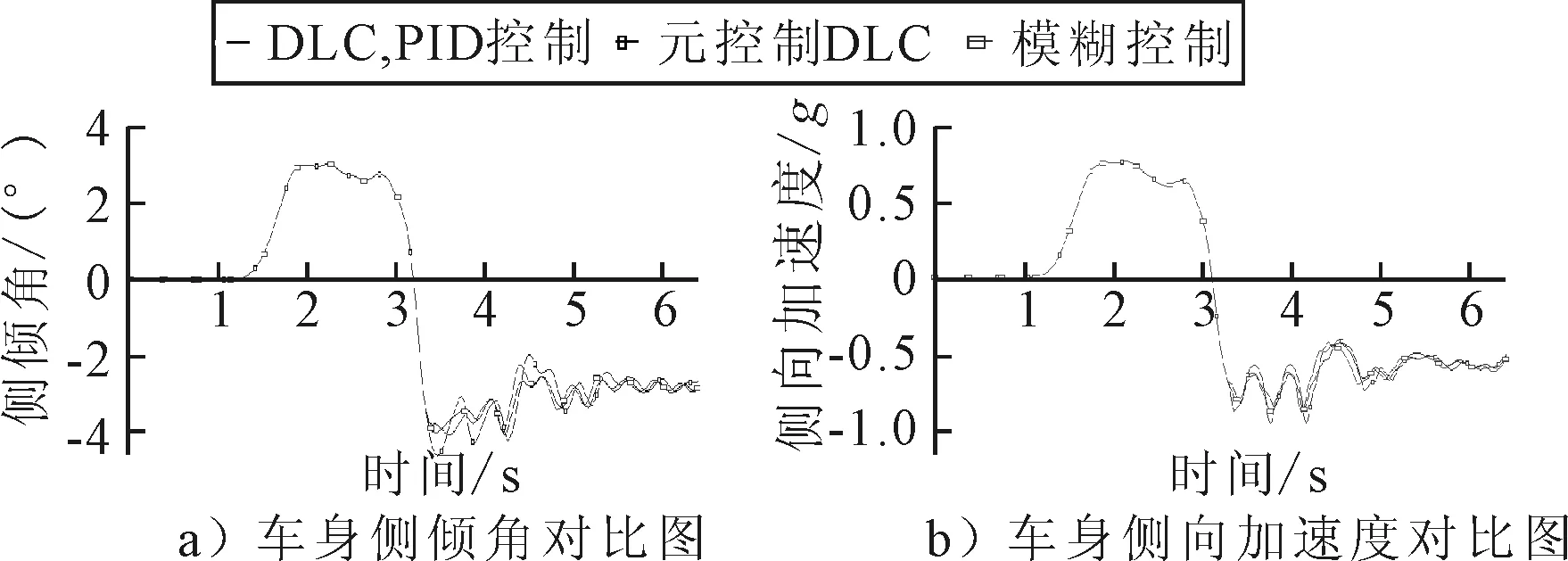
图14 双移线工况车身侧倾角和侧向加速度对比图
通过鱼钩试验工况验证,施加主动防侧翻控制策略在能够在一定程度上对车辆在行驶过程中的姿态进行矫正,从而防止侧翻事故的发生.
4 结 论
1) 在Carsim环境下,利用某型皮卡车参数,建立车辆防侧翻控制用参数模型.
2) 设定横向载荷转移率LTR作为侧翻阀值用于判断车辆是否发生侧翻,利用PID及模糊控制方法,建立基于主动悬架控制的车辆防侧翻控制器.
3) 在Matlab环境下建立皮卡车防侧翻联合仿真模型,利用鱼钩及双移线试验,对本文所建立的控制器进行验证.结果表明,本文所设计的控制器都将LTR控制在±0.8以内,并且能够降低车身的侧倾角和侧向加速度.其中PID控制效果更加明显,两种试验工况下均能够将车身侧倾角控制在4°以内,过渡时间更短,曲线更加平滑.
参考文献
[1] 陈超,张玉新,邓继业,等.工程车辆乘坐舒适性研究现状与关键技术[J].建筑机械,2012(1):71-75.
[2] 薛俊,胡灿,覃正海.汽车转向侧翻稳定性分析[J].装备制造技术,2013,7(2):12-14.
[3] NAM K, OH S, FUJIMOTO H, et al. Direct roll moment control for electric vehicles based on roll angle observer and lateral tire force control [C]. 8th International Conference on Power Electronics-ECCE Asia ,Jeju,2011.
[4] ZONG C F, ZHU T J. Multi-objective stability control algorithm of heavy tractor semi-trailer based on differential braking[J]. Chinese Journal of Mechanical Engineering, 2012,25(1):88-96.
[5] 尹浩,赵又群,温卫东,等.两种输入模型下的汽车逆问题分析[J].哈尔滨工业大学学报,2009,41(12):219-222.
[6] 徐哲,魏民祥.汽车稳定性控制系统模糊算法研究[J].机械科学与技术,2012,31(11):1791-1795.
[7] 赵伟,魏朗,杜峰.基于横摆力矩的汽车制动稳定性模糊控制[J].长安大学学报(自然科学版),2008,28(6):77-80.
[8] YIM S J, KWANGKI J, KYONGSU Y. An investigation into vehicle rollover prevention by coordinated control of active anti-roll bar and electronic stability program[J]. International Journal of Control, Automation and Systems, 2012,10(2):275-287
[9] 廖聪,吴新烨,黄红武,等.基于LMI的汽车主动悬架防侧翻H∞控制[J].机械与电子,2014,31(2):43-46.
[10] 严世榕,严钟辉.基于模糊PID的客车操纵稳定性控制研究[J].机械制造与自动化,2015,44(6):163-166.