基于参数辨识的自适应解耦控制算法的研究
2018-07-04,
,
(南昌航空大学 信息工程学院, 南昌 330063)
0 引言
工业生产过程中存在许多不确定的因素,如各个回路之间的耦合、工况频繁变化,造成被控对象的动态特性难以用精确的数学模型来描述,单回路控制器设计方法难以满足要求。因此解决被控对象的不确定性和各个回路之间的耦合,对于复杂工业中具有重要的意义,是未来研究的一个重要方向。文献[1]对参数未知或参数变化的被控对象采用极点配置的方法使用自校正PID控制器,但需要实时在线求解Diophantine方程,计算量大,不适用于实际生产控制。文献[2]提出了一种自校正重置PID控制方法,利用带遗忘因子的递推最小二乘法辨识被控对象的参数,但递推最小二乘法计算量大。文献[3]提出了一种闭环自适应解耦控制方法,其他输入对某一输入输出系统有可测干扰影响,采用前馈控制消除此干扰来实现解耦。文献[4-5]提出一种基于在扩张状态下对任意参考模型观测器自适应控制的方法,解决了将被控对象状态信息不可测以及存在不确定因素引发的问题。然而,对于多变量、强耦合且不确定的系统中被控对象参数是具有不确定性[6]等因素没有考虑。针对上述问题,本文提出了基于广义最小方差自适应解耦控制策略,并使用多新息随机梯度算法对控制器参数进行辨识,以提高控制器的性能,通过不同解耦的仿真对比,验证了该方法能够较好实现闭环系统的跟踪性并提高了控制系统的稳定性。
1 系统描述
1.1 控制系统结构
多变量自适应解耦[7]控制系统由参数可调控制器和多变量解耦控制律组合,其中自适应解耦控制律由模型参数辨识和控制器参数设计组成[8],其构成如图1所示。多变量自适应解耦控制方法将被控对象的解耦、控制和辨识结合起来,可以实现未知或缓慢变化的系统的自适应解耦控制。其中,模型参数辨识采用多变量被控对象的输入、输出信号辨识模型参数,解耦控制器设计使用模型参数的估计值,根据控制器的性能指标,在线设计控制器的参数,作为可调控制器的参数。
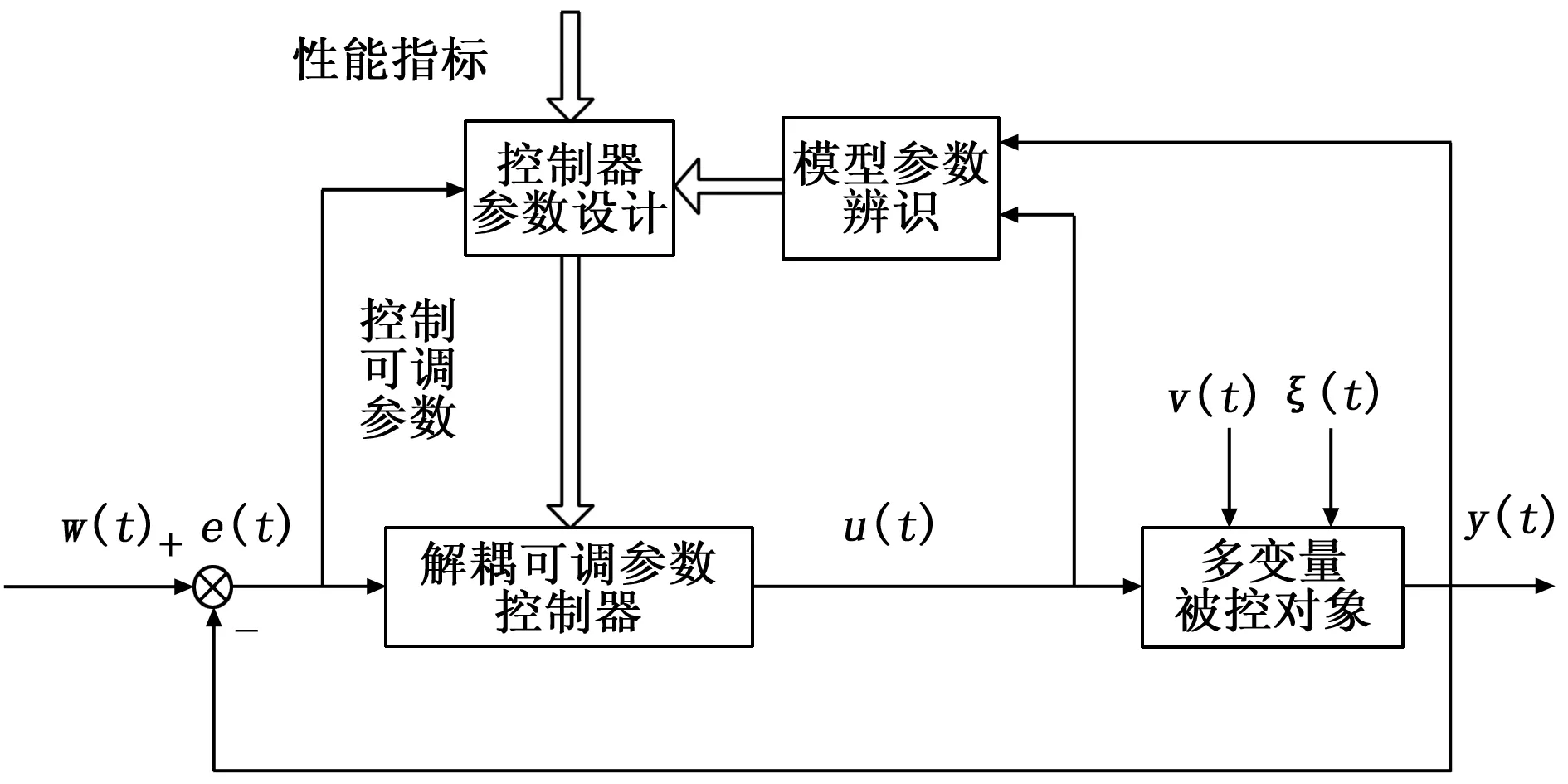
图1 自适应解耦控制系统结构
自适应解耦控制器使用输入输出数据在线辨识被控对象模型的未知参数,或者解耦可调控制器的参数,应用参数估计值去调整控制器的参数,从而适应被控对象的不确定性,使被控对象的输出较好地去跟踪理想输出。
1.2 控制问题的描述
设被控对象的动态模型用CARMA模型[9]描述:
A(z-1)y(k)=B(z-1)u(k)+C(z-1)ξ(k)
(1)
式中,u(k)和y(k)是二维输入、输出向量;{ξ(k)}是被控对象的二维驱动噪声;A(z-1)和B(z-1)是具有如下形式的单位后移算子z-1的二维多项式矩阵:
A(z-1)=
B(z-1)=
式中,dij(i,j=1,2)表示第j个输入与第i个输出之间的延时。A(z-1)为对角型多项式矩阵且AnA满秩,多项式矩阵B(z-1)是可逆的,即detB(z-1)≠0,并且B(z-1)中的时延项dij(i,j=1,2,···,n)已知。噪声{ξ(k)}是σ—代数Fk下的一个Martingale差分序列。存在对角多项式矩阵D(z-1)和B(z-1)使得:
D(z-1)Bd(z-1)K(z)=B(z-1)

于是被控对象模型式(1)可以表示为:
(2)
我们将Bd(z-1)分成两个多项式矩阵:
(3)

(4)
1.3 基于随机梯度(SG)辨识算法的改进
在系统辨识中,随机梯度算法[12-13]的计算量小,参数估计持续收敛,但收敛速度慢。为了改进随机梯度(SG)方法的收敛速度,可引入新息长度p,提高其收敛速度从而推导出多信息随机梯度算法(MISG),其算法如下所示:
(5)
(6)
(7)
Y(p,k)=[y(k),y(k-1),…,y(k-p+1)]T
(8)
Φ(p,k)=[φ(k),φ(k-1),···,φ(k-p+1)]
(9)
式中,E(p,k)∈Rp是一个信息向量,即多新息。当p=1时,多新息随机梯度算法就退化为随机梯度算法。通过分析,基于改进的辨识算法在收敛性和参数的估计精度进行了提升,使控制器的参数敛到真值,为控制器的有效控制提供了保障。这里,设k为当前时刻,我们y(k)和φ(k)称为当前数据,y(k-i)和φ(k-i)称为过去数据;新息向量E(p,k)第1元为当前数据,其余为过去新息。与随机梯度算法(SG)相比,多信息随机梯度算法(MISG)在每步计算参数估计时,随机梯度(SG)算法(10)~(12)只使用了当前数据y(k)和φ(k)以及当前新息;而多新息随机梯度(MISG)(13)~(17)不仅使用了当前数据和新息,而且使用了过去数据{y(k-i),φ(k-i):i=1,2,…,p-1}和新息可以潜在改善算法收敛性。多新息随机梯度算法重复使用了系统数据:在时刻k,多新息随机梯度(MISG)算法使用的数据{y(k-i),φ(k-i):i=1,…,p-1};而在时刻k+1,多新息随机梯度(MISG)算法使用的数据为{y(k+1-i),φ(k+1-i):i=0,1,2,…,p-1};因此,在两次相邻时刻递推计算参数估计时,重复利用的数据为{y(k-i),φ(k-i):i=0,1,2…,p-2}。这是多新息随机梯度(MISG)方法改善参数估计精度的原因。在相同的数据长度下,增加长度p能减小参数估计的误差,也就是说,大p导致高精度的参数估计,因此新息长度p的引入能改善参数估计精度。通过分析,基于改进的随机梯度(SG)算法可以改进算法的收敛性和参数的估计精度,能够使得控制器的参数收敛到真值,为控制器的有效控制提供了保障。
1.4 广义最小方差自适应解耦控制器的设计
针对被控对象模型式(1),设计多变量广义最小方差解耦控制器[14-16],对被控对象不同回路间的耦合进行消除,将广义输出误差向量e(k+d)的范数的方差极小,即minJ式中,
P(z-1)D(z)Y(k)-R(z-1)w(k)+
式中,w(k)为n维参考输入向量;D(z)为时延;Q(z-1)、R(z-1)和S(z-1)为z-1的对角加权多项式矩阵;p(z-1)为加权多项式,p(0)=1。引入丢图方程方程:
(10)


(11)
令广义输出向量的最优预报φ*(k+d)等于广义理想输出向量y*(k+d),就得到了保证广义输出误差向量e(k+d)的范数在均方意义下最小的如下形式的多变量广义最小方差解耦控制律,即:
E(z-1)w(k)=0
(12)
1.5 加权多项式的选择
多变量广义最小方差解耦控制器的加权矩阵多项式P(z-1)和加权多项式矩阵Q(z-1)、R(z-1)和S(z-1)的选择需要考虑3个方面:(1)保证闭环系统的稳定性;(2)消除被控对象输出y(k)与参考输入w(k)之间稳态跟踪误差;(3)尽可能消除不同回路之间的耦合。可以通过在线修正加权多项式矩阵S(z-1)的方法来消除闭环系统方程中耦合项的影响以实现解耦控制。
联系方程得到闭环系统的方程为:
(13)
(14)

令Q(z-1)=λQ1(z-1),则式(14)变为:
Q1(z-1)β2(z-1)-β(z-1)S1(z-1)=0
(15)
本文通过在线选择加权矩阵多项式矩阵S1(z-1)和R(z-1)来实现静态解耦的方法,同时可以消除跟踪误差,从式(15)中可知:
S1(z-1)=β-1(1)Q1(1)β2(1)
(16)
R(z)=I+Q(1)β(1)[I-G(1)-α(1)]
(17)
我们所需要的只是离线选择λ和Q1(z-1)以满足:
det{B(z-1)+λA(z-1)[Q(z-1)+S1(z-1)]}≠0,|z|≥1
2 多变量自适应解耦控制算法

(18)
同样可得控制器方程为:
(19)
定义数据向量φ(k)和参数矩阵θ如下所示:
(20)
θ= [α0,α1,…,αn1;β0,β1,…,βn2;β20;


(21)
控制器参数估计可以采用多新息随机梯度式(5)~(9)能保证控制器参数收敛到真值,提高控制器的有效性。
基于系统辨识的多变量广义最小方差自适应解耦控制算法[17-20]步骤总结如下:
1) 读入新的输出数据y(k)和参考输入数据w(k);
2) 采用改机的随机梯度(SG)算法式(5)~(9)辨识控制器参数θ;
3) 利用式(16)~(17)在线修正S(z-1)、R(z-1);
4) 选择P(z-1)=1,离线选择λ,Q(z-1);
6) 在每个采样周期中重复以上步骤1)~步骤6)。
3 仿真实验及结果分析
为了验证本文的多变量广义最小方差自适应解耦控制器的有效性,我们进行下列的仿真实验。
多变量系统模型如下:
A(z-1)y(k)=B(z-1)u(k-1)+ξ(k)
式中,
噪声ξ(k)=[ξ1(k)ξ2(k)]T是均值为0、协方差矩阵为0.171的随机向量。选择加权多项式:
Q(z-1)=(1-z-1)。为了取得更好的解耦效果,将S1(z-1)选为二阶多项式矩阵,在线修正加权多项式矩阵S1(z-1),并保证S1(z-1)=0。采用PID控制器仿真时,选择离散PID控制器的参数分别为KP1=0.8,KI1=0.1,KD1=0.02;KP2=0.25,KI2=0.15,KD2=0.02。
本文在4种控制策略下的仿真效果如图2~5所示。图2和图3仿真效果对比,PID解耦控制器的响应比常规PID时间加快了40%,超调量减少了约12.5%;图4为采用广义最小方差自适应控制算法的仿真结果,图5为增加解耦的结果。当被控对象参数矩阵未知时,采用广义最小方差解耦控制器对多变量进行解耦,由图可知,在时间k=20时,解耦后的超调量减少了约45%,解耦设计使得闭环系统的跟踪性能大大提高。
PID控制器是工业生产中最常用的控制器,其控制算法成熟,但对于多输入多输出系统,特别是变量多且耦合性强时,常规的PID控制难以调制到最优状态,导致其控制效果不佳,而本文采用的图4的自适应控制算法具有自动适应系统的变化。与PID控制相比,在起始阶段自适应的响应时间提高了75%,超调量降低了25%。通过图3和图5仿真结果得出,采用PID解耦控制实现的效果比自适应解耦控制效果的超调量增大约为46%,所得到的效果不是很理想,而本文利用改进的随机梯度(SG)算法来辨识控制器参数,从而实现了自适应解耦控制算法,使得系统输出的相互影明显减小,控制效果性能更佳。

图2 常规PID控制被控 对象时输出、入的仿真曲线 图3 解耦PID控制被控 对象时输出、入的仿真曲线

图4 自适应控制被控对象 输出、入时的仿真曲线 图5 自适应解耦控制被控对 象输出、入时的仿真曲线
4 结论
本文设计了广义最小方差自适应解耦控制器,对参数矩阵未知的多变量系统利用对角矩阵法解除了不同回路间的耦合作用,并使得被控对象的广义输出向量与广义理想输出向量的误差向量的范数方差最小。为了使控制器具有更好的控制性能,本制器参数收敛到真值,以便实现控制输出信号能更好的跟踪参考输入信号。通过对算法的改进和结构的调整、仿真求证,进而证明本文的方法能够较好实现闭环系统的跟踪性并提高了控制系统的稳定性和鲁棒性[21]。
参考文献:
[1] 吴平景,王银河, 陈浩广.基于改进递推预测差神经网络算法的极点配置PID控制方法[J].广东工业大学学报,2015,32(4):112-117.
[2] 贺建军,吴高亮,喻寿益.广义最小方差自校正重置PID控制器及其在压力系统中的应用研究[J].计算技术与自动化,2013,32(1):17-21.
[3] 颜召军,李新阳,饶长辉.一种自适应光学闭环系统预测控制算法的仿真研究[J].光学学报,2011, 31(1):15-23.
[4] 李 杰,齐晓慧,刘新海,等.改进模型参考自适应控制及其在解耦控制中的应用[J].电机与控制学报,2015,19(5):112-120.
[5] 朱 冰,四旋翼飞行器的模型参考自适应控制研究[J].计算机测量与控制,2014,22(6):1745-1746,1776.
[6] Liu H B, Zhou T.存在随机参数不确定性的线性系统鲁棒状态估计[J].Science China, Information Sciences,2017,60(1):012202.
[7] 蒋红梅,李战明,唐伟强.基于在线辨识的自适应解耦控制[J].自动化与仪器仪表,2016(2):153-156.
[8] Wang Y, Bai Y, Zhang N, et al. Nonlinear adaptive decoupling control for the forced-circulation evaporation process[A]. 中国控制会议[C]. 2017.
[9] Yamamoto T,Inoue A, Shah S L.Generalized minimum variance self-tuning pole-assignment controller with a PID structure[A]. IEEE International Conference on Control Applications[C].IEEE,2002(1):125-130.
[10] 陈丽君,姚建勇,董振乐.基于连续可微摩擦模型的直流电机扰动补偿自适应控制[J].计算机测量与控制,2015,23(11):3661-3663.
[11] Chang I, Jaliwala S A, Chase J S. Online system identification for controlling a machine, US20170089043[P]. 2017.
[12] Chen J. Stochastic gradient algorithm for dual-rate sampled data nonlinear systems based on the missing outputs identification model[A]. 中国自动化学会控制理论专业委员会、中国系统工程学会,第三十三届中国控制会议论文集(E卷)[C].中国自动化学会控制理论专业委员会、中国系统工程学会,2014:5.
[13] Chen J,Zou H. Stochastic gradient algorithm for dual-rate sampled data nonlinear systems based on the missing outputs identification model[A]. Control Conference.IEEE[C].2014:6673-6677.
[14] Alipouri Y, Poshtan J. A linear approach to generalized minimum variance controller design for MIMO nonlinear systems[J]. Nonlinear Dynamics,2014,77(3):935-949.
[15] Yokoyama R,Masuda S. Data-driven generalized minimum variance regulatory control with constrained controller structure[A]. International Conference on Advanced Mechatronic Systems.IEEE,2017:17-22.
[16] 商利斌,高喜玲,李 钊,等.直膨式空调人工神经网络在线自适应控制器应用研究[J].计算机测量与控制,2015,23(7):2377-2380.
[17] 齐晓慧,田庆民,董海瑞.基于Matlab系统辨识工具箱的系统建模[J].兵工自动化, 2006, 25(10):88-90.
[18] 向晓燕,蒋效会.基于系统辨识的系统模型[J].电脑知识与技术,2008,2(6):1286-1288.
[19] 王浩宇,张云生,张 果.系统辨识及自适应控制系统算法仿真实现[J].控制工程,2008(s2):77-80.
[20] 李 明,马 玲,李 源.基于系统辨识的自适应控制技术的应用[J].自动化应用,2013(6):88-8.
[21] Chen Y,So H C, Kuruoglu E E, et al. Variance analysis of unbiased complex-valued l p-norm minimizer[J].Signal Processing, 2017,135:17-25.
