助老伴行机器人的触滑觉驱动控制系统设计开发
2018-07-04,,2,,
,,2,,
(1.西安交通大学 机械工程学院,西安 710049;2.西安交通大学 陕西省智能机器人重点实验室,西安 710049)
0 引言
当前社会随着老龄化现象的加剧,全世界范围内的老年人口所占比重越来越大,而老年人由于年龄的增加,身体素质也随之下降,这给老年人的日常活动带来了极大的影响,使得老年人的生活质量得不到保障。而助老服务机器人[1-2]的出现可以辅助老年人进行户外活动,代替护理人员来帮助老年人进行外出行走以及对老年人的护理工作,不仅如此,助老服务机器人还可以有效的保证老年人的出行安全,防止老年人因发生身体摔倒等而受到伤害,极大的提升了老年人的生活质量。
面向老年人的服务机器人技术已经成为当下的研究热点,近年来国内外已有多个研究机构对此展开了研究[3-7],并在一定程度上取得了一定成果。名古屋大学的KoheiWakita开发了一种辅助老年人和残疾人行走的手杖型智能机器人[8],利用(intentional direction,ITD)分析适用对象的力信息,得到使用对象的行动意图,在线预测得到使用对象的行走意图,通过分析用户的意图对该智能手杖机器人进行运动控制;延世大学和LG公司的Hong-Gul Jun等人开发研制一种面向老年人群和有一定残疾人群的助行机器人[9],该助行机器人主要由助行系统和sit-to-stand系统组成,旨在帮助使用对象独立自主的完成站立和正常行走等日常活动;卡耐基梅隆大学和匹兹堡大学的Hsin-yi Liu和Fu-Chieh Chuang等人研制的PSFs轮椅机器人[10]的主要功能是可以让使用者自行调节电动轮椅的姿态,包括PSFs升降高度以及轮椅各模块的角度,帮助那些失去运动能力的人能够独立的完成对PSFs的姿态的调节以达到一个让使用者足够舒服的角度,并通过VSC虚拟教练系统完成对使用者的训练,帮助他们能够正确的控制PSFs改变姿态以及轮椅的移动控制。
在对助老机器人的设计研发上,机械结构决定了机器人所能最终实现的功能,而控制系统则是能够控制机器人实现这些功能。好的控制系统可以让使用对象在操控机器人时更加方便自然,机器人在执行这些操作时也能更加流畅自然。因此,本课题组设计开发了一台助老伴行服务机器人[11-15],本文在助老伴行机器人机械本体的基础上提出了一种触滑觉驱动控制系统的总体设计方案,其主要设计思路是:通过触滑觉感知系统采集助老伴行机器人使用对象手部的触滑觉信息,然后通过处理器对使用对象的控制意图进行识别,确定助老伴行机器人的驱动模式,并发送相应的控制指令到助老伴行机器人的驱动系统执行一系列动作。为此本文开发并设计了一种助老伴行机器人触滑觉驱动控制系统,包括触滑觉感知系统的设计和驱动控制系统的设计,最后进行实验验证了其可行性。
1 触滑觉驱动控制系统设计总体方案
助老伴行机器人通过触滑觉感知系统与使用对象之间进行交互,触滑觉感知系统将采集到的触滑觉信息输入到处理器中进行计算识别得到人的控制意图,进而确定相应的助老伴行机器人的驱动模式,然后转化为相应的控制指令传递给驱动器对电机进行驱动,最终完成整个操作过程,整个控制系统的总体方案如图1所示。

图1 触滑觉感知控制系统总体方案框图
助老伴行机器人触滑觉驱动控制系统主要包括触滑觉感知系统和助老伴行机器人驱动控制系统两个部分。触滑觉感知系统包括觉触滑觉传感器、信号调理电路、A/D转换模块以及微处理器,触滑觉感知系统的核心部件是触滑觉传感器,是助老伴行机器人与使用对象进行信息交流的关键;助老伴行机器人驱动控制系统包括微处理器、驱动电路、检测电路、故障检测电路和左右两个轮毂电机,整个驱动控制系统以微处理器为中心,链接整个系统的各个部分,本文中选用的微处理器是型号为TM320F2812的DSP数字处理器。整个触滑觉控制系统的安装位置如图2所示,其中控制箱内包换微处理器和驱动电路等模块。
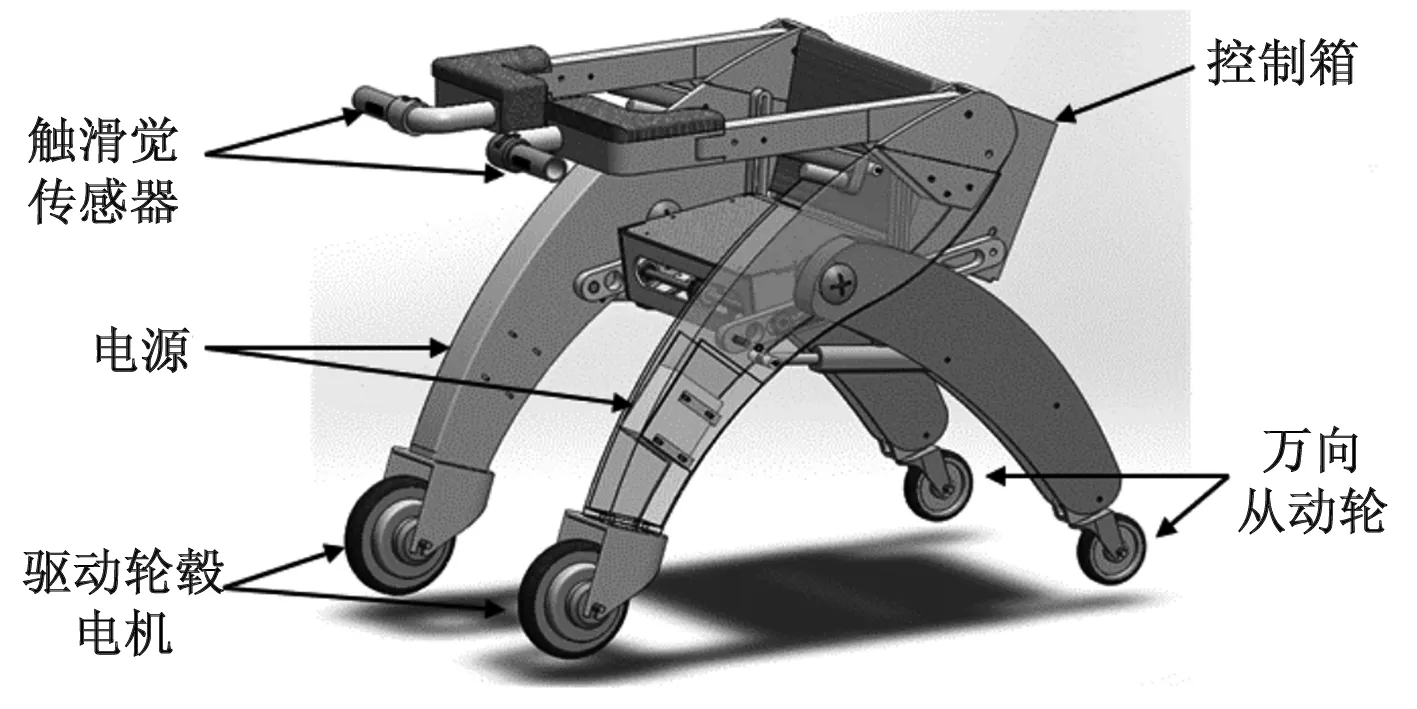
图2 触滑觉感知控制系统安装位置
整个助老伴行机器人触滑觉感知控制系统要求对所采集的触滑觉信号进行正确识别,对前进、后退、左转、右转、停止这5种驱动模式至少有95%以上的识别正确率。另外,助老伴行机器人应当按照模式识别识别结果进行正确的移动。
助老伴行机器人性能参数见表1。
2 助老伴行机器人的触滑觉感知系统设计
2.1 触滑觉感知系统硬件设计
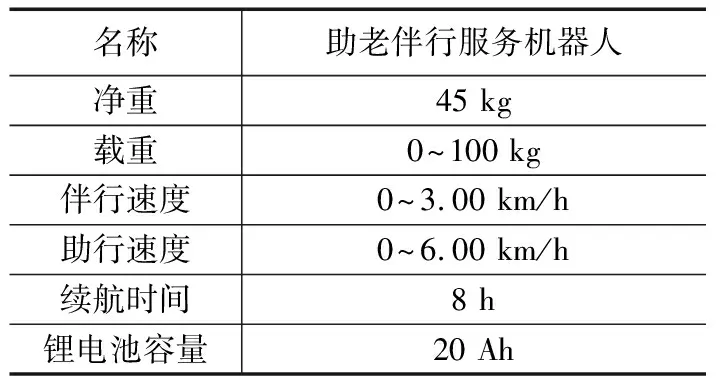
表1 助老伴行机器人性能参数
助老伴行机器人与使用对象之间的信息交互方式为触滑觉感知交互与,是利用触滑觉感知系统完成的。触滑觉感知系统主要由触滑觉传感器、信号调理电路、A/D转换模块和微处理器组成。布置在助老伴行机器人把手处的触滑觉传感器采集到使用对象的触滑觉信号后,通过信号调理电路对信号进行放大、滤波。然后利用A/D转换模块将模拟信号转化为数字信号输入到处理器中进行处理分析。触滑觉感知系统的总体如图3所示。

图3 触滑觉感知系统的总体框图
本文中所使用的触滑觉传感器选用由新型压电材料PVDF为敏感单元制作的PVDF压电薄膜传感器。PVDF即聚偏二氟乙烯,是一种有机高分子材料,具有柔韧性好、质地轻、灵敏度高、频带宽、压电系数高、价格低等优点,用PVDF制作的传感器非常适合用于对触滑觉信号的感知。本文根据PVDF传感器的特性原理制作了相应的信号调理电路。另外在设置触滑觉传感器通道数目时,根据人的抓握行为特点,设置8路触滑觉传感器,在助老伴行机器人的左右两个把手各设置4路。
2.2 助老伴行机器人对老年人行走意图的模式识别方法
2.2.1 触滑觉信号的特征提取
关于信号的特征提取,有很多可以选择的特征参数,例如均值、绝对值积分平均值、均方根、方差等可做为特征量。PVDF传感器在受到触觉应力时产生的信号如图4所示,为此最终选用触滑觉信号的算术平均值作为适用对象与PVDF传感器接触的特征值,算术平均值作为一种比较常用的时域特征,对于信号的表征更加直接。

图4 PVDF触滑觉信号
具体提取方式是:对于采集到的触滑觉信号x(n)按照时间顺序连续选取N个信号值进行算术平均值计算,得到其特征值。这样一来N的取值就比较重要,N值取得过大,那么灵敏度就低;取值太小,误差率就会加大。所以N的取值需要经过实验来进行确定。经过多次实验,N的取值最终设置为200。也就是当使用对象和PVDF传感器发生接触产生接触信号后的200 ms的信号算术平均值作为特征值。算术平均值是用以描述随机过程不变的分量,表示在时间长度T内的随机信息所有值的算术平均值。具体公式为:
(1)
其中:μ代表触滑觉信号的特征值。
关于如何判定触滑觉驱动意图信号的产生,本文中采用阈值法来判定,也就是当触滑觉特征值大于某个阈值M时,认为有触滑觉信号产生,关于这个阈值M的设定,如果设置的太大,就会丢失一部分信号产生误差;如果设置的太小,也会由于太过灵敏产生一些误操作。因此需要该阈值的产生同样需要经过实验来选择。
2.2.2 基于BP神经网络的驱动模式识别方法
BP神经网络是一种采用误差反向传播算法的多层前馈神经网络。其主要优点有:分布式的信息存储方式、大规模并行处理、自学习和自适应良好、鲁棒性和容错性好。
BP神经网路通常由输入层、隐含层和输出层组成,输入层节点的个数通常取输入向量的维数,输出层节点则取输出向量的位数,隐层节点个数目前尚无确定的标准,通常通过反复试凑来获得。根据Kolmogorov定理,具有一个隐层的三层BP神经网络能够以任意精度逼近任意非线性连续函数。所以本文选择一个三层BP神经网路来对获取的触滑觉信号特征进行模式识别,以提取助老伴行机器人使用者的行走意图,实现对助老伴行机器人的触滑觉驱动控制。
通过触滑觉感知系统采集到的8路触滑觉信号,计算其算术平均值作为表征触觉的特征量,构建一个具有8个元素的特征向量,那么所设计的神经网络输入层节点为8个,通过神经网路所识别的类共有5类:前进,后退,停止,左转,右转。常用的做法是对于n类问题,设计n个输出节点的神经网络,使每个节点对应一类。在训练阶段,对于属于第i类的样本,设定第i个输出节点为1,其余节点为0。然而,分类多类问题还可以有其他的编码方式。比如,可以把每个输出节点看作一个0,1二值变量,用m个输出节点来编码c类,如3个节点即可编码8类:000,001,010,011,100,110,101,111。这种编码可以更节省输出节点数目,所以这里用三个输出为0或1的节点来表示这5类:前进(1,0,0),后退(0,1,0),停止(0,0,1),右转(1,1,0),左转(0,1,1)。网络输出值代表的模式类别如表2所示,所以所设置神经网络具有:8路输入,3个输出节点。

表2 模式识别分类表
隐层节点数通常使用试凑法来确定隐层的节点数,或者根据以下公式来选择最佳隐层节点数:
(2)
m为输出层节点数,n为输入层节点数,a为[1,10]之间的常数。在这里n=8,m=3,取a=4,那么h取整为7。即隐层节点数为7。
激活函数采用Sigmoid函数,在这里选择双曲正切Sigmoid函数:
(3)
接下来是确定BP神经网络的训练函数,BP神经网络的训练函数有多种,各有缺点,但是没有一种函数能够适应所有情况下的训练过程。其中最基本的BP训练法就是梯度下降BP训练函数。本文为此就选择梯度下降BP网络训练函数,且设计的BP神经网络训练流程如图5所示。

图5 BP神经网络训练流程图
3 助老伴行机器人的驱动控制系统设计
助老伴行机器人的驱动控制系统主要包括DSP数字信号处理器、驱动器和轮毂电机组成,整个驱动控制系统的原理框图如图6所示。

图6 助老伴行机器人驱动控制系统原理框图
3.1 驱动控制系统硬件设计
助老伴行机器人采用的是双轮差速驱动控制,以机器人包括两个驱动轮,驱动轮选用的是直流无刷轮毂电机。驱动器的作用是接收DSP下达的控制指令并按照控制指令对电机进行驱动,驱动器内部主要包括功率驱动模块、位置检测模块和保护检测模块。
3.1.1 电机选型
助老伴行机器人采用的是双轮差速驱动,所以机器人包括两个驱动轮和万向从动轮,本文中助老伴行机器人选用的驱动轮为直流无刷轮毂电机。该电机具有调速性能好、噪声低、寿命长和免维护等优点,而且轮毂式电机的动力装置和传动装置集成到轮毂内部,去掉了传动结构,可以节省安装空间,让机械结构变得更加紧凑,直流无刷轮毂电机如图7所示。
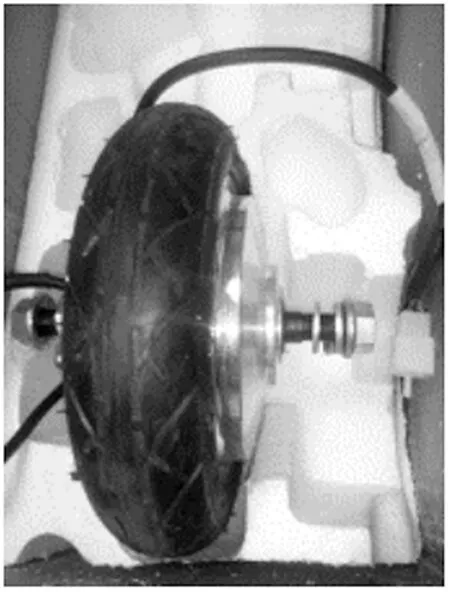
图7 直流无刷轮毂电机
3.1.2 功率驱动模块
对于直流无刷轮毂电机的驱动,功率驱动电路根据霍尔位置检测电路检到的转子位置按照一定序列触发功率管进行换相,进而驱动直流无刷轮毂电机。功率驱动电路直接影响了直流无刷轮毂电机的运行。本文设计的功率驱动电路的核心部件是IR2130驱动芯片和MOSFET功率管。通过以IR2130为核心和MOSFET组成的三项全桥逆变电路。对其输出PWM波控制MOSFET功率管。从而实现对直流无刷轮毂电机的驱动。
3.1.3 位置检测模块
位置检测模块的作用是检测转子的位置,并将转子的位置信息传递给微处理器,微处理器根据转子的位置对直流无刷轮毂电机进行换相操作。所涉及的位置检测电路原理如图8所示。

图8 位置检测电路原理图
3.1.4 保护检测模块
控制系统在实际运行过程中,一些不稳定因素的发生会损害整个电路,为了应对这些不稳定因素,保护功率驱动电路和位置检测电路的安全,需要在电路设计中加入保护电路。所设计的保护电路原理如图9所示。

图9 保护电路原理图
3.2 电机控制策略
直流无刷电机控制方案有很多,本文选择数字信号处理器作为主控制器的控制单元。通过研究模糊控制与传统的PID控制,最终选择模糊自适应PID控制,其综合了传统PID控制和模糊控制的优点,既有控制算法灵活且适应性强的优点,同时又具有PID控制无稳态误差的特点。且动态响应更快。其控制器结构如图10所示。
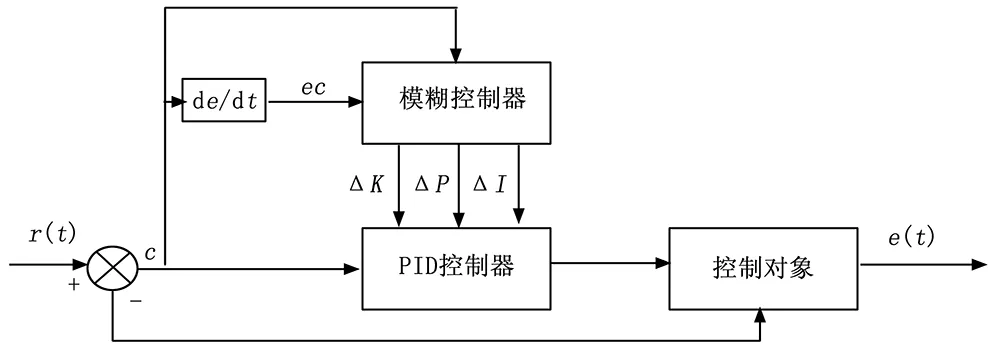
图10 电机模糊PID控制器原理图
4 实验结果与分析
为了验证本文所设计的前述触滑觉驱动控制系统的性能,在助老伴行机器人的机械本体上搭建了触滑觉感知系统和助老伴行机器人驱动控制系统,并进行了在线实验。
实验步骤:
第一步。首先按照助老伴行机器人不同的驱动模式下利用触滑觉感知系统对数据进行采集。对于助老伴行机器人前进、后退、左转、右转、停这五种驱动模式,每种模式采集50组实验数据,一共250组,并按照上文所述方法对信号进行特征提取并进行存储,然后在MATLAB中对所建立的BP神经网络进行训练,训练结束后,将MATLAB中训练好的网络权值和阈值导出并存储。
第二步。利用CSS软件编写BP神经网络模式识别程序,程序语言为C语言。网络中权值和阈值为上一步MATLAB中所导出的参数值,程序编译完成后将程序上传至DSP中。
第三步。实验通过一名操作人员,分别对机器人进行前进、后退、停止、左转、右转这五种模式的操作,每种模式共进行10次,并记录实验结果。
最后的实验结果如表3所示。
通过实验结果分析可知,基于BP神经网络的助老伴行机器人触滑觉驱动模式识别控制系统对使用对象的控制意图的平均识别正确率达到95%,并根据模式识别结果控制助老伴行机器人完成对应的动作,符合设计方案要求。

表3 实验结果
5 结束语
本文对助老伴行机器人的触滑觉驱动控制系统整体,以及它的两大模块:触滑觉感知系统和驱动控制系统的设计分别进行了介绍,并进行了在线实验验证。结果表明,该助老伴行机器人触滑觉感知驱动控制系统可以有效监测使用者(老年人)的控制意图,并对机器人执行正确的驱动控制。进而验证了该助老伴行机器人触滑觉感知驱动控制系统的可行性以及有效性。
参考文献:
[1] Liu H Y, Grindle G, Chuang F C, et al. A survey of Feedback modalities for wheelchair power seat functions[J]. IEEE Pervasive Computing, 2012, 11(3):54-62.
[2] Hirata Y, Muraki A, Kosuge K. Motion control of passive-type intelligent walker based on caster-like dynamics[A]. International Conference on Rehabilitation Robotics[C]. IEEE, 2005:477-481.
[3] 徐向阳. 基于人机工程学的工业车辆驾驶室设计研究[D]. 南京:南京航空航天大学, 2012.
[4] 董艳茹. 机器人触觉传感器的分析与研究[D]. 秦皇岛:燕山大学, 2010.
[5] 张 威. 多功能助行机器人控制系统设计与实验研究[D]. 哈尔滨:哈尔滨工程大学, 2009.
[6] 万陆洋. 人机交互原理在产品设计中的应用[J]. 包装工程, 2014(14):85-88.
[7] 王常磊. 机器人嵌入式传感与人机交互技术设计[D]. 南京:南京理工大学, 2017.
[8] Wakita K, Huang J, Di P, et al. Human-Walking-Intention-Based Motion Control of an Omnidirectional-Type Cane Robot[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1):285-296.
[9] Jun H G, Chang Y Y, Dan B J, et al. Walking and sit-to-stand support system for elderly and disabled[A]. IEEE International Conference on Rehabilitation Robotics[C]. IEEE, 2011:1-5.
[10] Liu H Y, Grindle G, Chuang F C, et al. A Survey of Feedback Modalities for Wheelchair Power Seat Functions[J]. IEEE Pervasive Computing, 2012, 11(3):54-62.
[11] 魏晓娟, 张小栋. 用于助老助行机器人驱动控制的触滑觉检测识别方法[J]. 计算机应用, 2014(a01):156-158.
[12] Han H, Zhang X, Mu X. An approach for fuzzy control of elderly-assistant & walking-assistant robot[A]. International Conference on Ubiquitous Robots and Ambient Intelligence[C]. IEEE, 2017:263-267.
[13] Osivue O R, Zhang X, Mu X, et al. PID Control of Elderly Assistant and Walking Assistant Robot[A]. International Conference on Applied Mathematics, Modeling and Simulation[C]. 2018.
[14] Zhang X, Wang Y, Wei X. Research on control technology of elderly-assistant & walking-assistant robot based on tactile-slip sensation[J]. 中国工程科学(英文版), 2013, 11(1):89-96.
[15] 魏晓娟, 张小栋. 用于助老助行机器人驱动控制的触滑觉检测识别方法[J]. 计算机应用, 2014(a01):156-158.
