变惯量机载天线控制中转动惯量在线辨识器设计及仿真
2018-07-04,,
, ,
(西南交通大学 机械工程学院,成都 610031)
0 引言
当飞机搭载机电系统对中并跟踪卫星时,系统的灵活性大大提高,但与在固定位置工作时不同的是,运载体本身具有的位置和姿态方向的运动给系统带来了干扰,机电系统的正常工作受到影响。所以为保证机电系统在移动载体上的正常高精度工作,机电稳定系统被广泛提出[1]。机载天线稳定跟踪系统处于多变的状态时平稳地指向目标,以完成对目标卫星的捕获及跟踪。同时,复杂的动态背景对该系统的伺服驱动控制系统的性能也有所影响,天线的方位及俯仰机构在旋转运动的过程中存在旋转体质量分布的变化,伺服系统上的负载转动惯量因此具有时变性,由于伺服系统的转动惯量发生动态改变而导致控制性能弱化,无法保证系统对中卫星的稳定性。
一些学者已经对转动惯量辨识做过相关的研究。文献[2]通过加减速过程的方法来建立转动惯量和转矩电流的关系,此方法操作简单但会影响到伺服驱动器的加减速过程。文献[3]使用扰动负载转矩观测器的方法,建立扰动转矩和转动惯量识别误差之间的关系,根据一定的自适应率实时辨别转动惯量。文献[4]提出了扩展卡尔曼滤波器(EKF)的方法,建立永磁同步电机全维观测器,实时观测负载扰动和转动惯量,但该方法运算比较复杂,实现成本较高。
本文以机载天线稳定跟踪系统为实际控制的研究对象。该系统安装在移动载体飞机上,由永磁同步电动机驱动,在Matlab/Simulink软件中建立具有转动惯量输入的系统模型,模拟天线伺服控制系统在动态环境中的转动惯量扰动,选择合适的方法在线辨识转动惯量并将其作为输入量自整定电机的速度环并仿真验证该控制方法的效果。
1 载体转动惯量模型建立分析
在本文研究的机载天线稳定跟踪系统中采用基于PMSM的电机控制系统。为获取PMSM的运动方程,天线伺服系统机械结构的静摩擦和库伦摩擦忽略不计,在只考虑系统粘性摩擦的前提下得到电机平稳运行时的机械运动方程:
(1)

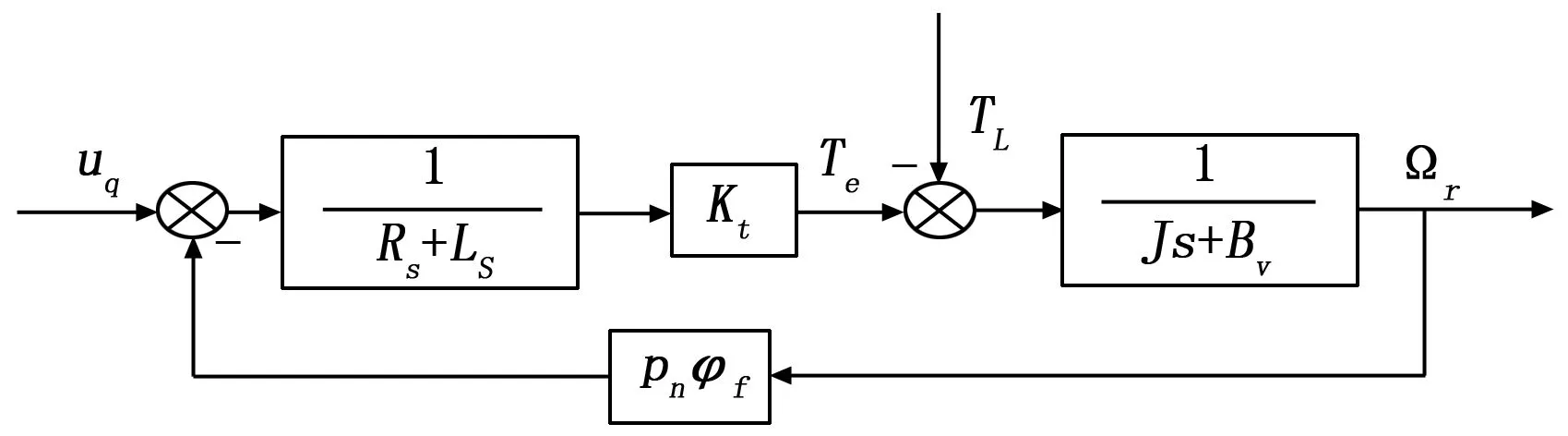
图1 PMSM对象系统框图
考虑到该电机工作于航空航天环境中且负载变化频繁,为实现其调速范围宽、静差小、跟随性和抗扰动性能优越的控制目标,选择成熟的闭环PI控制策略。典型Ⅰ型系统在负载扰动的情况下会产生静差,故要实现转速无静差且保证系统的动态抗扰性能,通常选择使用速度环调节成典型Ⅱ型系统。为将速度环校正成为具有良好动态抗扰性能的Ⅱ型系统,速度调节器采用PI调节器,它能避免因为微分突变而造成的控制失稳,同时具有算法简单、鲁棒性好、可靠性高和参数易整定等优点。通过选择速度调节器中合适的比例放大增益Kp和时间常数Ti就可以将速度环控制对象从Ⅰ型系统校正成为Ⅱ型系统,以保证对阶跃扰动的稳态输出为零,系统的速度环控制框图如图2所示。
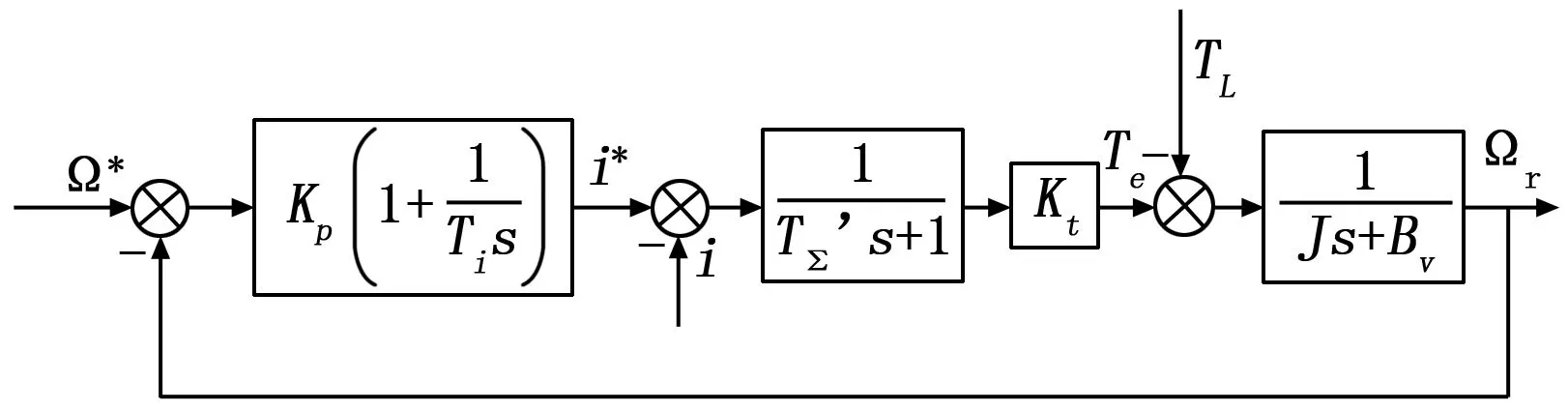
图2 速度环控制结构框图

2 转动惯量在线辨识算法
2.1 模型参考自适应辨识算法
在线辨识需要选择适当的系统输入变量和输出变量,并在状态变量的时间函数关系基础上建立系统数学模型使之与被测模型等价。本文中利用在线辨识的方法来估计系统中的转动惯量值。通常,用于电机参数的在线辨识方法包括卡尔曼滤波法、最小二乘辨识算法、模型参考自适应辨识算法和状态观测器法。其中,卡尔曼滤波法的计算量复杂且不适用与电机速率响应要求较快的实时控制中[5];最小二乘辨识法存在“数据饱和”问题而限制了其适用范围;状态观测器能降低对高频信号的抑制。模型参考自适应辨识法是一种以稳定性理论为基础的辨识算法。
故在本文所研究的系统中,为消除天线运动姿态不断变化过程所带来的持续变化的负载扰动,保证伺服系统在自适应控制下具有较好的稳定性能,选择模型参考自适应辨识算法作为在线辨识系统转动惯量的算法。
2.1.1 应用并联辨识器在线辨识转动惯量
天线伺服驱动控制系统的转动惯量会随着天线姿态的改变而实时改变,是一个频繁变动的参数值,离散时间模型参考自适应系统推出的递归辨识A类算法主要适用于被控对象的实际可调数学模型参数值出现频繁变动,故在对转动惯量参数进行辨识过程中采取并联辨识器的A类算法。假设采样时间为T,则公式(1)离散化可得到:
BυΩr(k-1)
(2)
则可得到伺服电机在k时刻的机械角速度表达式:
(3)
同理,伺服电机在k-1时刻的机械角速度表达式为:
(4)
将电机在k时刻和k-1时刻的角速度方程(3)、(4)相减,可得到下列方程:
Ωr(k-1))+(Te(k-1)-Te(k-2)-TL(k-1)+
TL(k-2))]
(5)
此时,可根据式(5)在MatLab/Simulink中建立起该自适应辨识器的参考模型仿真如图3所示。

图3 自适应辨识器参考模型
由于数字类平台在现代计算机的基础上广泛利用,参考模型通常采用虚拟装置。而当使用比较高的采样频率来对该伺服电机系统的连续时间模型进行参考自适应离散化时,采样时间T的值就比较小,则可将负载转矩在短时间内看做一恒定不变的常量,即有TL(k-1)=TL(k-2),则将其代入式(5)中有:
Ωr(k)=2Ωr(k-1)-Ωr(k-2)+b·Δ
(6)
Δ=Bυ(Ωr(k-2-Ωr(k-1))+Te(k-1)-Te(k-2);
同理,可建立该机载天线稳定跟踪系统中伺服系统转动惯量J自适应辨识器的可调模型:
(7)

(8)



图4 转动惯量自适应辨识结构图
结合式(6)、(7),可以在MatLab/Simulink中建立起该自适应辨识器的可调模型和A类自适应辨识算法仿真模型如图5所示。

图5 自适应辨识器可调模型和A类算法
3 基于J在线辨识的速度环自整定
3.1 PI控制器参数自整定算法
为保证系统在转动惯量发生变化时仍然运行良好,需要将在线辨识出的系统实际转动惯量作为输入信号对速度控制器的参数进行相应调整,从而提高伺服控制系统的鲁棒性。在图2中将速度环控制结构中速度控制器等效为带有比例系数Kp和积分系数Ki的PI控制器,则在不考虑负载转矩TL和粘滞摩擦系数Bυ的前提下,可得到速度环的开环传递函数为:
(9)



故将这两个条件代入式(9)中可得到期望开环传递函数特性为:
(10)
则根据式(9)和(10),可确定出速度控制器的比例系数和积分系数分别为:
(11)
(12)
4 仿真验证及结果分析
4.1 在线辨识转动惯量算法仿真验证
该仿真验证实验的PMSM参数为:粘滞摩擦系数Bυ=7.403 e-5 N·s/m、定子电阻Rs=2.875 Ω、等效同步电感Lq=Ld=8.5 e-3 H、转子磁场的等效磁链φf=0.175 Wb、极对数pn=4,且辨识算法的采样时间T=0.000 002 s。
仿真条件为:电机参考机械角速度Ωref=700 rad/s,负载转矩在t=0.4 s由TL=1 N·m增加为TL=3 N·m,则可建立机载天线稳定跟踪系统的伺服系统转动惯量在线辨识系统仿真,如图4所示。
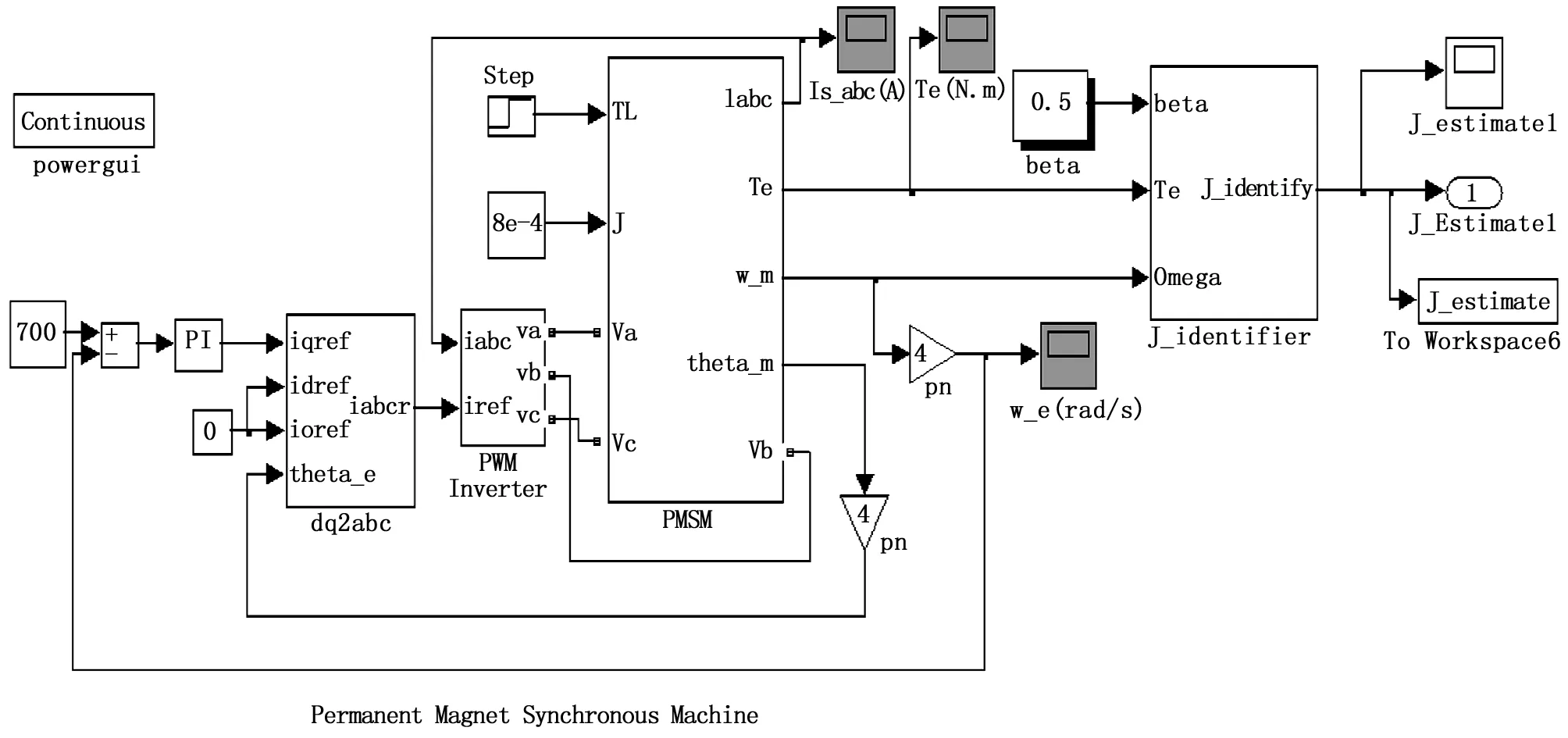
图6 伺服系统在线辨识系统仿真图
为验证该辨识器在不同转动惯量情况下在线辨识的性能,分别假设转动惯量为阶跃突变、正弦波变化这两种条件下采用不同自适应增益β的辨识结果,以选择最佳的自适应增益。
1) 转动惯量J跃变
此时仿真时间为0.6 s,假设电机转轴转动惯量在t=0.4 s时由J=8×10-4kg·m2跃变成J=10×10-4kg·m2,则取不同自适应增益β值对比其仿真结果:

图7 J为阶跃突变时辨识波形图
分析图7中不同的曲线可知,当β1=0.005时转动惯量突变后的收敛时间大于0.03 s,当β2=0.05时突变后的收敛时间大大减少约为0.01 s,而当自适应增益增大至β3=0.5时收敛时间小于0.005 s。
2) 转动惯量J呈正弦波变化
此时假设电机转轴的转动惯量按照J(t)=0.000 8 sin(100 t)+0.000 82 kg·m2的正弦规律变化,则此时仿真结果如下:
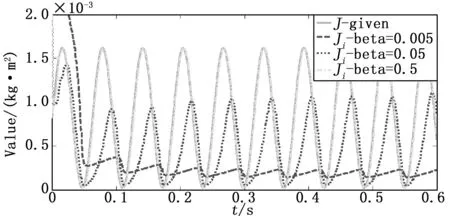
图8 J为正弦变化时辨识波形图
分析图8中不同的曲线可知当转动惯量J呈正弦波变化时,在线辨识的收敛时间随着自适应增益β的增大而缩短,收敛误差随着β的增大而减小,该辨识算法的跟随性能随着β增大而逐渐优化。
虽然在仿真实验中,在线辨识的收敛速度和跟随性能随着自适应增益的增大而逐渐优化,但由于该辨识算法并非无偏估计,且在实际的伺服电机控制系统中存在大量的电磁干扰信号,则转动惯量实际值与辨识值间的误差随着β的增大也会加大,故为保证辨识参数的超调量较小且收敛速度快,需要折中选择自适应增益β的值[7]。
4.2 结合J在线辨识的速度环自整定仿真验证
在初始转动惯量为定值的情况下,为优化控制系统在转动惯量增大和减小时的速度响应,建立系统仿真模型。通过对比比例系数和积分系数固定的PI调节器和上述参数自整定算法的控制器对比系统的控制性能,假设伺服系统初始转动惯量Jo=8×10-4kg·m2。将在线辨识出的实际转动惯量作为输入实时调整PI控制器的比例系数和积分系数。

图9 速度环自整定仿真模型
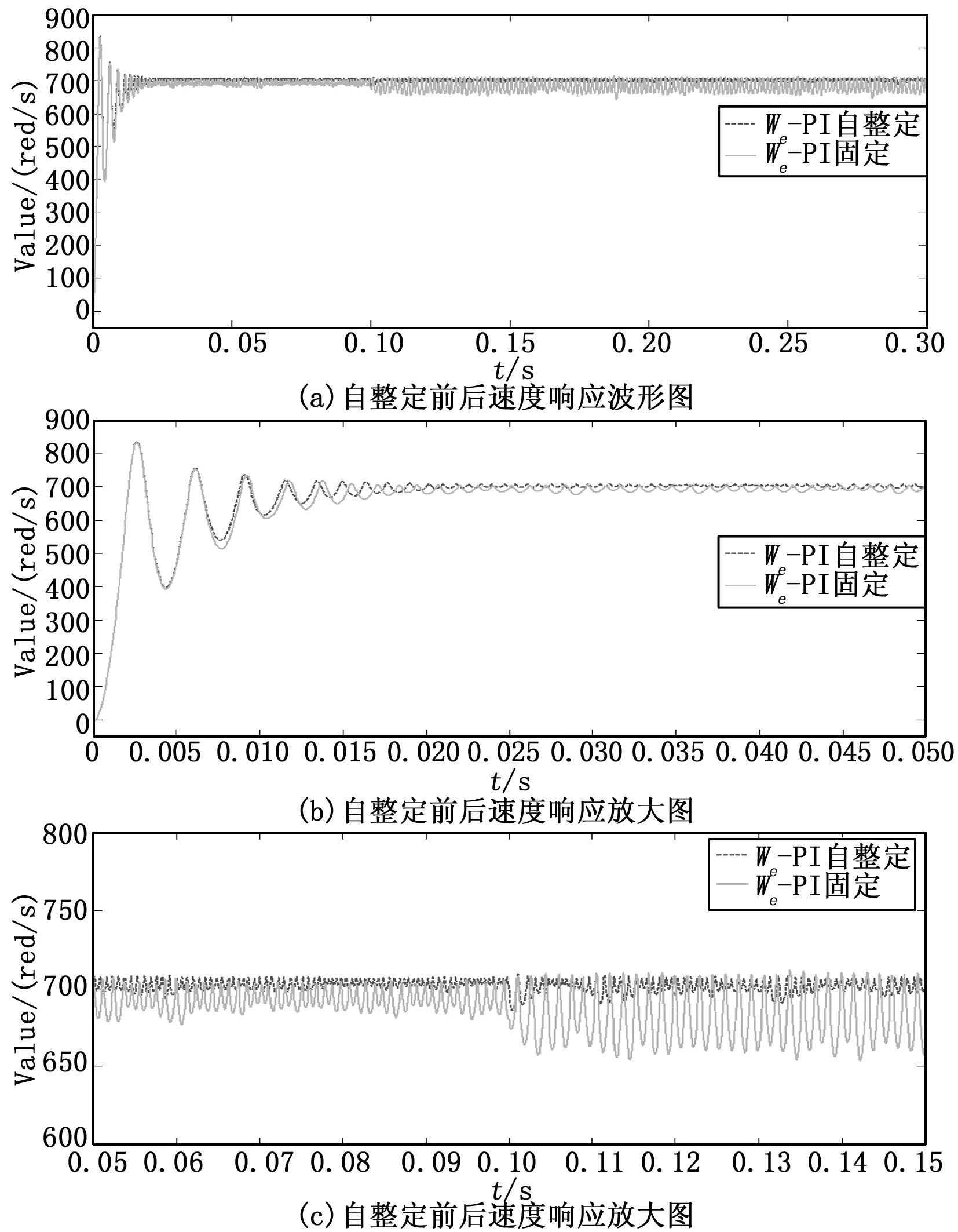
图时自整定前后速度响应波形图
图10中实线表示自整定前的速度响应曲线,虚线表示自整定后的速度响应,由图10(b)可知,自整定前后的速度响应速度基本一致,但根据图10(c)看出自整定后的速度曲线超调量小于整定前,且在t=0.1 s系统负载转矩发生突变时振荡的程度小于整定前。故在转动惯量减小时,参数自整定控制方法能有效减小速度响应的超调量,从而提高系统的稳定性。
4.2.2 系统实际转动惯量J2=10Jo
同上当转动惯量输入J2=10Jo时,采用参数自整定的调节器与采用Ki、Kp固定参数PI调节器进行控制性能的仿真对比:
在图11中实线表示自整定前速度响应,而虚线表示自整定后速度响应曲线。由图可知,自整定前后的速度响应速度基本一致,但根据图11(b)可看出,自整定后速度响应最终收
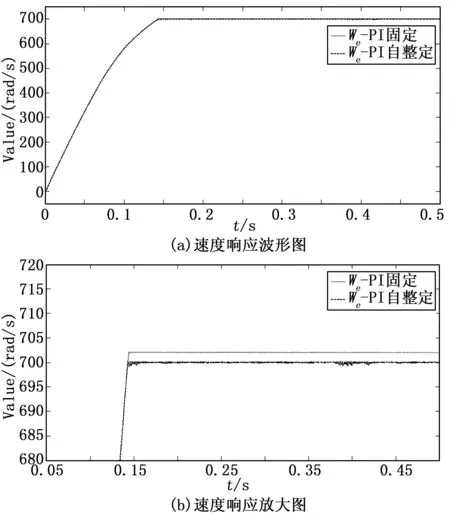
图11 J2=10Jo时自整定前后速度响应波形图
敛在参考角速度值上,相比自整定前超调量减小,收敛性能优化。
4 结论
针对机载天线稳定跟踪系统,提出了系统转动惯量在线辨识及对速度控制器的参数进行相应调整的算法。通过对系统状态变量的离散化及A类辨识算法在线辨识出系统的转动惯量,并将转动惯量作为速度控制器的参数进行相应的调整;以天线伺服系统在永磁同步电机下平稳运行时的机械运动方程建立仿真模型,进行转动惯量在线辨识器及速度环自整定的模拟仿真。仿真结果表明在选择折中的自适应增益β下,辨识的转动惯量超调量较小且收敛速度快,而且相比于参数固定的PI系统,经速度控制器自整定控制后,伺服系统的速度响应有更小的更好的超调量和收敛性,说明自整定控制器具有良好的抗转动惯量变化的性能。
参考文献:
[1] 徐世东.舰载稳定平台高精度伺服控制系统的设计研究[D].哈尔滨:哈尔滨工程大学机械工程学院,2008:9-13.
[2] Wang A M,et al.On-line PI self-turning based on inertia identification for permanent magnet synchronous motor servo system[A].International Conference on Power Electronics & Drive Systems[C].2009:1406-1410.
[3]Awaya I,Kato Y,Miyake I,et al.New motion control with inertia identification function using disturbance observer[A].International Conference on Power Electronics and Motion Control[C].1992:77-81.
[4] Hong S J,Kim H W,Sul S K.A Novel Inertia Identification Method for Speed Control of Electric Machin [C]. Proc.IECON,1996:1234-1239.
[5]孙宜标,郭庆鼎. 基于神经网络给定补偿的交流永磁直线伺服系统滑模控制[J].电工技术学报,2002,17(3):21-25,87.
[6] 陈伯时.电力拖动自动控制系统:运动控制系统[M]. 北京:机械工业出版社,2003.
[7] 刘 辉.交流伺服系统及参数辨识算法研究[D].南京:南京航空航天大学自动化学院,2005:40-42.
